 如何在S7-1500系列的两个CPU间创建一个编程连接
如何在S7-1500系列的两个CPU间创建一个编程连接

简介
在以下示例中,在 S7-1500 系列的两个 CPU 间创建一个编程连接,并将一个字符串从 CPU 1 发送到 CPU 2。待发送字符串的数据类型为 STRING。
要求
CPU 1 中的程序
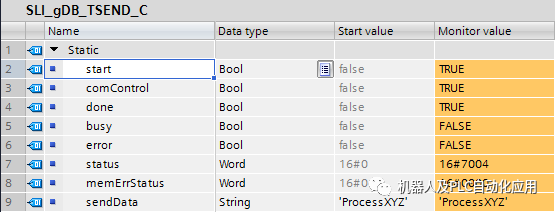
在全局数据块中,创建 9 个变量存储“TSEND_C”的数据。
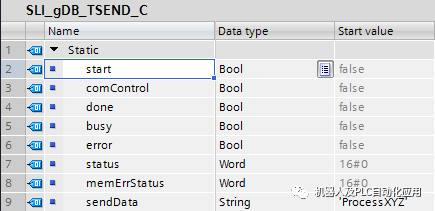
创建函数块“SLI_FB_TSEND_C”,并在该函数块中创建以下局部变量。

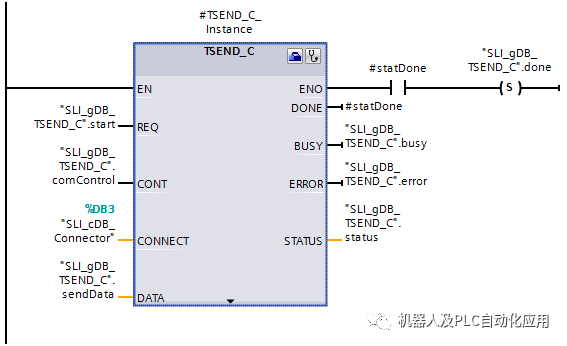
程序段 1:互连“TSEND_C”指令的参数,如下所示:但请勿互连参数 CONNECT。
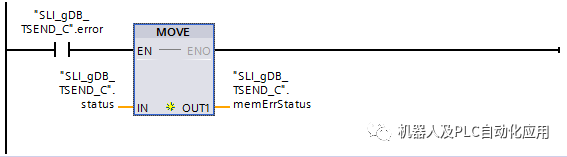
程序段 2:保存 TSEND_C 的错误状态,如下所示。
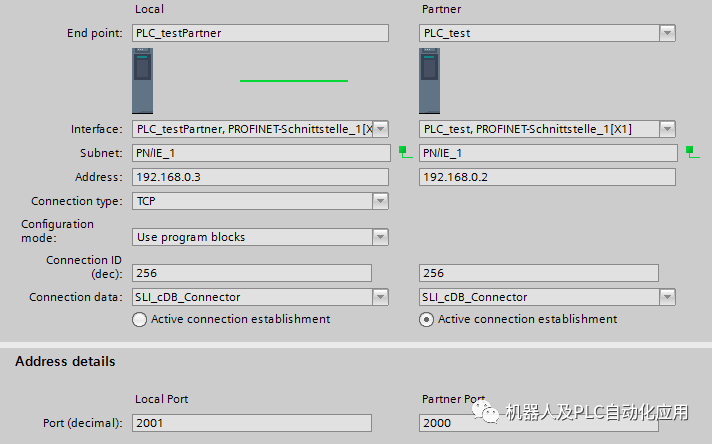
TSEND_C 的组态
要互连参数 CONNECT,可通过“属性 > 组态”(Properties > Configuration) 打开指令“TSEND_C”的向导。
对 TSEND_C 的组态进行如下设置:
| 输入字段 | 条目 |
|---|---|
| 端点 |
在下拉列表中,选择作为发送方和接收方的 CPU。 系统将自动输入接口、子网和地址。 |
| 连接数据 |
在下拉列表中选择“新建”(New),为每个 CPU 创建一个数据块。 该数据块用于存储连接数据。数据块的名称可任意设置。 为 CPU 1(本地 CPU)建立主动连接。 |
| 连接类型 |
选择条目“TCP”。 这意味着,连接建立时使用“TCP”协议的以太网连接。 |
| 组态模式 |
选择条目“使用程序块”(Use program block)。 这意味着,将通过编程连接建立连接。 |
| 连接 ID |
在该通信连接中,输入任意一个选定的连接 ID。 该连接 ID 在项目中尚未分配。 |
| 伙伴端口 | 输入一个伙伴端口值。该值必须 >=2000。 |

CPU 2 中的程序
在全局数据块中,创建 10 个变量存储“TRCV_C”的数据。
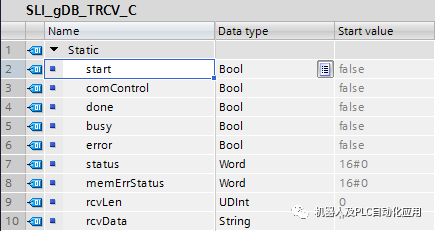
创建函数块“SLI_FB_TRCV_C”,并在该函数块中创建以下局部变量。

程序段 1:互连“TRCV_C”指令的参数,如下所示:但请勿互连参数 CONNECT。
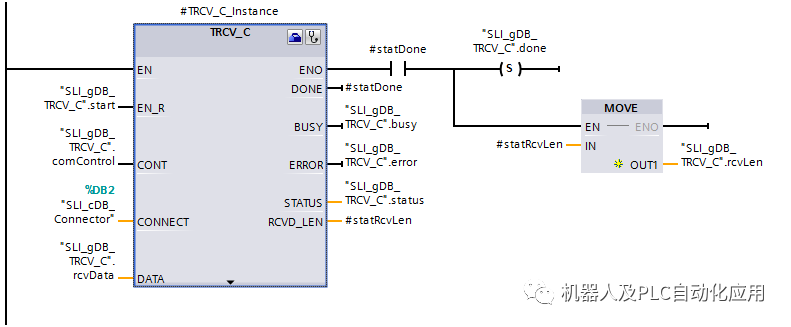
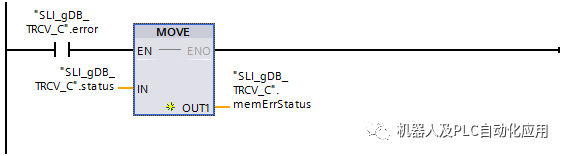
程序段 2:保存 TRCV_C 的错误状态,如下所示。
TRCV_C 的组态
对 TRCV_C 的组态进行如下设置:
|
说明 连接数据 组态 TSEND_C 后,已创建了一个数据块(“SLI_cDB_Connector”),并带有为各个 CPU 存储的连接数据。如果不希望创建新的数据块并输入连接数据,也可直接使用创建的数据块(“SLI_cDB_Connector”)。 如果要选择已创建的数据块,则这些数据块必须位于“项目树”(project tree) 的“程序块 > 系统块”(Program blocks > System blocks) 中。 |
连接建立的操作过程
要在 RUN 模式下建立通信连接,请按以下步骤操作:
|
对于 TRCV_C,将参数 EN_R 更改为“1”。 对于 TRCV_C,将参数 CONT 更改为“1”。 对于 TSEND_C,将参数 REQ 更改为“1”。 对于 TSEND_C,将参数 CONT 更改为“1”。 |
终止连接的操作过程
要在 RUN 模式下终止通信连接,请按以下步骤操作:
|
对于 TSEND_C,将参数 CONT 更改为“0”。 对于 TSEND_C,将参数 REQ 更改为“0”。 对于 TRCV_C,将参数 CONT 更改为“0”。 对于 TRCV_C,将参数 EN_R 更改为“0”。 |
CPU 1 的行为
输入参数 REQ(“start”)返回信号状态“TRUE”时,启动指令“TSEND_C”。输入参数 CONT(“comControl”)中的信号状态为“TRUE”时,“TSEND_C”指令将在 CPU 1 与 CPU 2 间创建一个通信连接。为此,可通过输入参数 CONNECT(或数据块“SLI_cDB_Connector”)检索该连接数据。
进行多次调用时,“TSEND_C”指令将传送输入参数 DATA(“sendData”)处检测到的数据记录。数据记录传送成功时,输出参数 DONE(“#statDone”)的信号状态为“TRUE”,且输出参数 STATUS(“status”)的值为“0000”。由于输出参数的值仅在有效时才显示,因此 DONE(“#statDone”)的成功状态将保存在变量“done”中。
将该数据记录发送到 CPU 2 后,将继续监视该通信连接(状态为“7004”)。输出参数 ERROR(“error”)或变量“memErrStatus”)可用于指示本示例中的执行过程是否出错。
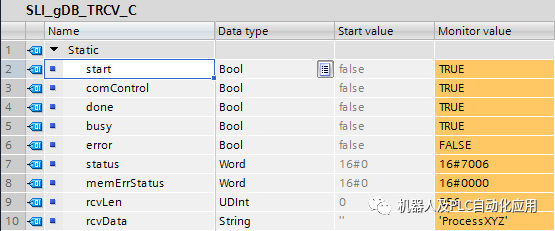
CPU 2 的行为
输入参数 EN_R(“start”)返回信号状态“TRUE”时,启动指令“TRCV_C”。输入参数 CONT(“comControl”)中的信号状态为“TRUE”时,“TRCV_C”指令将在 CPU 2 与 CPU 1 间创建一个通信连接。为此,可通过输入参数 CONNECT(或数据块“SLI_cDB_Connector”)检索该连接数据。
进行多次调用时,“TRCV_C”指令将接收所传送的数据记录。该数据记录将记录在参数 DATA(“rcvData”)中。数据记录传送成功时,输出参数 DONE(“done”)的信号状态为“TRUE”,且输出参数 STATUS(“status”)的值为“0000”。并通过输出参数 RCVD_LEN(“#statRcvLen”),确定 BYTE 中实际传送的数据记录长度。仅当传送成功时,才显示该值。之后,将检查“0”。
由于输出参数的值仅在有效时才显示,因此请进行以下操作步骤:
将“#statRcvLen”的值保存在“rcvLen”中。
将“#statDone”的值保存在“done”中。
将“#status”的值保存在“memErrStatus”中。
CPU 2 接收到该数据记录后,将继续监视该通信连接(状态为“7006”)。输出参数 ERROR(“error”)或变量“memErrStatus”)可用于指示本示例中的执行过程是否出错。
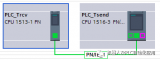
两个 S7-1500 系列的 CPU 通过 PROFINET 进行互连,它们之间的连接尚未组态。
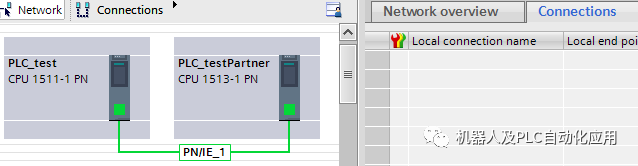
基于“属性 > 保护”(Properties > Protection) 中的低保护级别,可确保每个 CPU 都可进行读写访问。
审核编辑:汤梓红
-
cpu
+关注
关注
68文章
11343浏览量
226043 -
程序
+关注
关注
117文章
3849浏览量
85510 -
字符串
+关注
关注
1文章
596浏览量
23228 -
S7-1500
+关注
关注
3文章
303浏览量
7428
原文标题:在 S7-1500 系列的两个 CPU 间创建一个编程连接,发送函数的编程示例
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
S7-1500系列PLC+变频器+编码器组成位置控制系统设计原理
S7-1500、ET系列的计数、测量、位置检测

基于S7-1500、ET系列CPU的结构及使用

基于S7-1500的运动控制功能介绍

S7-1500 CPU支持与其它S7-1500 CPU进行直接数据交换
S7-1500和S7-1200 F-CPU间Flexible F-Link通信
西门子S7-1500 之间 S7 通信



基于S7-1500双边通信的组态编程步骤





评论