 高速比较器应用于ToF激光雷达前端设计——HA1007应用指南1
高速比较器应用于ToF激光雷达前端设计——HA1007应用指南1
乾鸿微新推出高速低延迟推挽式输出比较器HA1007,已有样片支持送样,欢迎联系我们!
比较器(Comparator)是构造与运算放大器相近的模拟集成电路,比较器将某个输入端作为基准固定电压,放大另一输入端的电压差,输出高或者低;例如+IN的电压大于-IN的电压时,则输出高电平,反之则输出低电平。基本的运算放大器与比较器的功能框图一致,如图1所示,由两个输入端,两个电源端和一个输出端组成。
图1 运放与比较器功能框图比较器与运算放大器的最大区别是内部负反馈电路的有无,运算放大器需要构建负反馈电路来使用,内部多含补偿电容;比较器没有负反馈电路,不含补偿电容,相较于运算放大器比较器便具有了更低的响应时间,这使得比较器具有快速上升时间和短延迟,拥有纳秒级别上升时间和延迟的比较器是光学前端设计中的优选。乾鸿微自研并经由国内代工厂代工的HA1007型轨到轨超高速单通道比较器,具有关断SHDN控制端口,典型传输延迟时间为5ns,工作电压范围2.2V~5.5V,输出电路形式为推挽型,还具有轨到轨输入输出特性,十分适合应用于光学前端系统中。ToF激光雷达光学前端系统的设计简图如图2所示[1],系统包含激光驱动器,激光二极管,光电二极管,跨阻放大器,比较器,时间数字转换器和微控制器组成。微控制器(MCU)控制激光驱动器驱动激光二极管发射脉冲激光,经目标物反射后为光电二极管所接收,光电二极管将接收到的光信号转换成微小电流信号,跨阻放大器将来自光电二极管的微小电流信号转换为差分电压信号,最后经由比较器将差分电压信号转化为数字信号发往时间数字转换器(TDC)转换后由微控制器(MCU)处理。
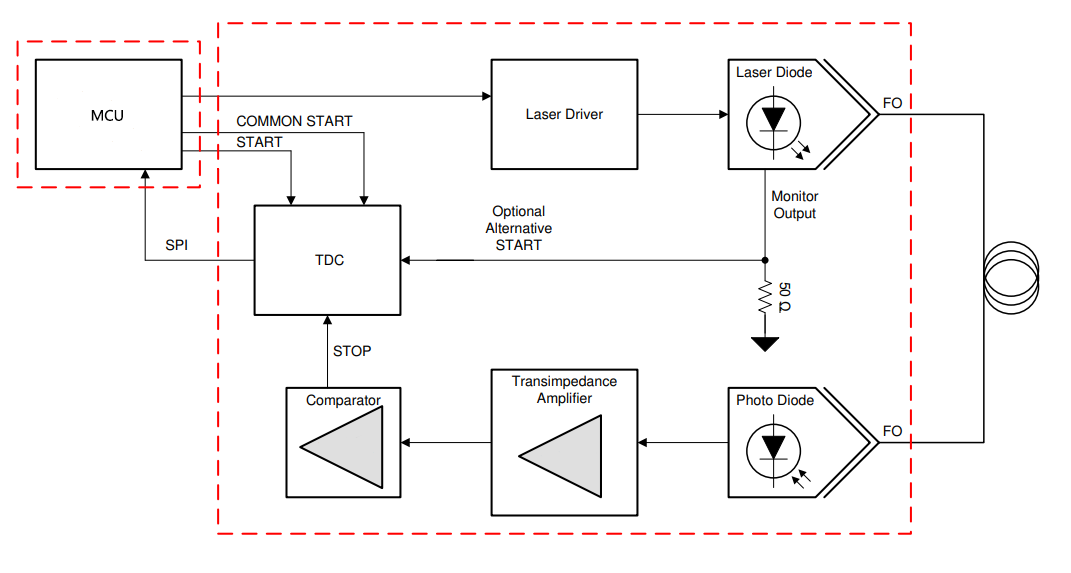
图2 ToF激光雷达光学前端系统设计简图
HA1007型轨到轨超高速单通道比较器拥有2.4ns的短上升/下降时间,5ns的短延迟时间,应用于ToF激光雷达光学前端系统有助于实现整个系统的高分辨率与长探测距离。此前,乾鸿微已推出多款应用于激光雷达系统的模拟芯片,HD1001型超高速GaN FET驱动器,HA1003型输入钳位保护的TIA放大器,再搭配新推出的HA1007型轨到轨超高速单通道比较器,助力您实现激光雷达设计的低成本高性能!
参考文献[1] Time of Flight and LIDAR - Optical Front End Design, Texas Instruments, 2022
-
激光雷达
+关注
关注
968文章
3967浏览量
189808 -
TOF
+关注
关注
9文章
482浏览量
36329
发布评论请先 登录
相关推荐
激光雷达的维护与故障排查技巧
如何提升激光雷达数据的精度
激光雷达与其他传感器的比较
物联网系统中的高精度测距方案_单点TOF激光雷达


光学雷达和激光雷达的区别是什么
激光雷达点云数据包含哪些信息
激光雷达与毫米波雷达的优缺点是什么
基于FPGA的激光雷达控制板


激光雷达的探测技术介绍 机载激光雷达发展历程






 工商网监
工商网监
评论