 世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系
世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系
相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。这篇博客介绍相机的成像过程,以及四个坐标系之间的装换关系。
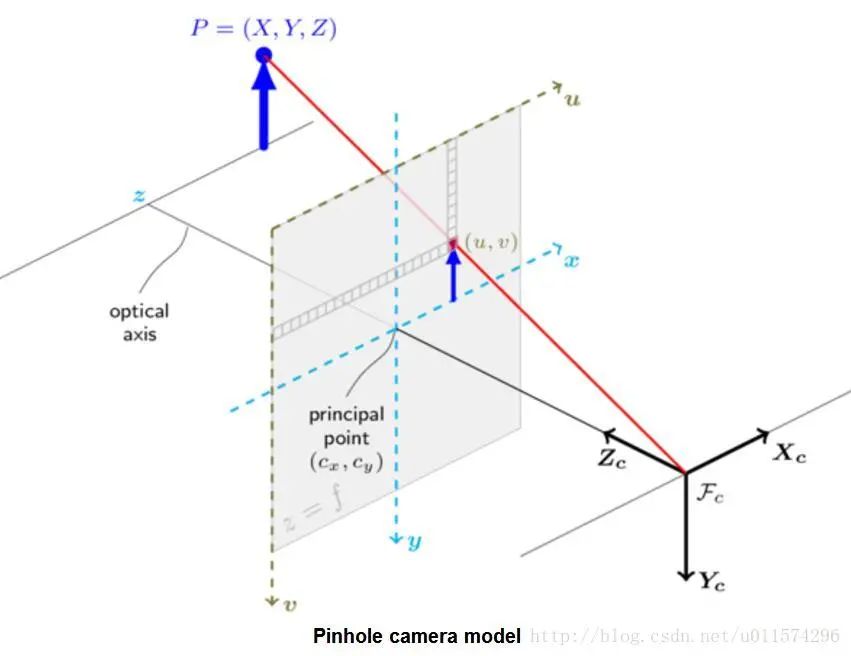
相机理想成像模型:
世界坐标系:
客观三维世界的绝对坐标系,也称客观坐标系。因为数码相机安放在三维空间中,我们需要世界坐标系这个基准坐标系来描述数码相机的位置,并且用它来描述安放在此三维环境中的其它任何物体的位置,用(X, Y, Z)表示其坐标值。
相机坐标系(光心坐标系):
以相机的光心为坐标原点,X 轴和Y 轴分别平行于图像坐标系的 X 轴和Y 轴,相机的光轴为Z 轴,用(Xc, Yc, Zc)表示其坐标值。
图像坐标系:
以CCD 图像平面的中心为坐标原点,X轴和Y 轴分别平行于图像平面的两条垂直边,用( x , y )表示其坐标值。图像坐标系是用物理单位(例如毫米)表示像素在图像中的位置。
像素坐标系:
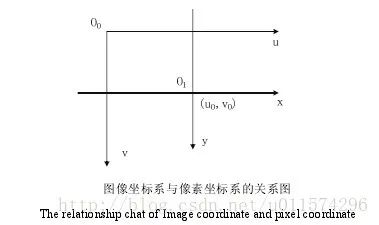
以 CCD 图像平面的左上角顶点为原点,X 轴和Y 轴分别平行于图像坐标系的 X 轴和Y 轴,用(u , v )表示其坐标值。数码相机采集的图像首先是形成标准电信号的形式,然后再通过模数转换变换为数字图像。每幅图像的存储形式是M × N的数组,M 行 N 列的图像中的每一个元素的数值代表的是图像点的灰度。这样的每个元素叫像素,像素坐标系就是以像素为单位的图像坐标系。
已知一个现实世界中的物体点的在世界坐标系中的坐标为(X, Y, Z),经过相机拍摄得到图片,在图片上的像素坐标为(u , v )。假设在图像坐标系中的坐标为( x , y ),在相机坐标系中的坐标为(Xc, Yc, Zc)。各个坐标之间的转化如下:
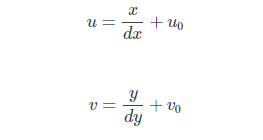
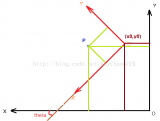
像素坐标系与图像坐标系的关系
 他们之间的转换关系为:
他们之间的转换关系为:
采用齐次坐标再用矩阵形式将上式表示为:
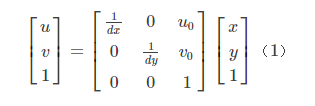
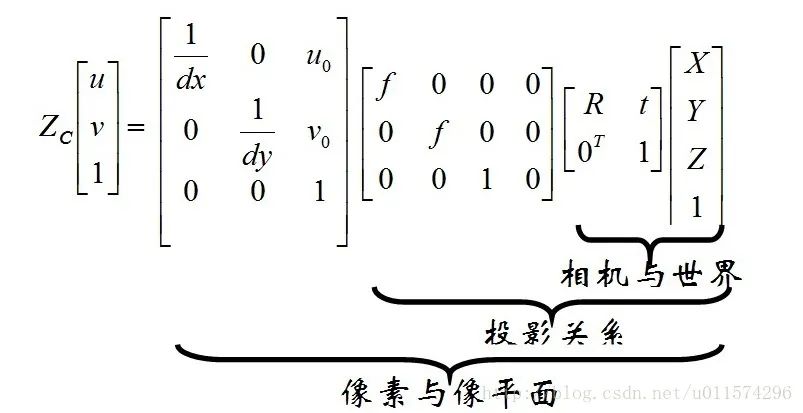
其中(u0, v0)是图像坐标系原点在像素坐标系中的坐标,dx 和 dy分别是每个像素在图像平面x和 y方向上的物理尺寸。
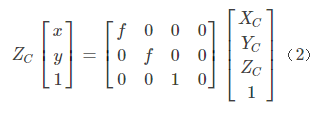
图像坐标系与相机坐标系的关系

其中 f 为焦距(像平面与相机坐标系原点的距离)。用齐次坐标系和矩阵表示上述关系:
相机坐标系与世界坐标系的关系
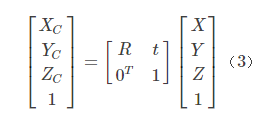
其中 R 为3 × 3正交旋转矩阵,t 为三维平移向量。
像素坐标系与世界坐标系的关系
由式(1)(2)(3)可得:
审核编辑:汤梓红
-
图像
+关注
关注
2文章
1084浏览量
40457 -
像素
+关注
关注
1文章
203浏览量
18583 -
相机
+关注
关注
4文章
1350浏览量
53594 -
坐标系
+关注
关注
0文章
29浏览量
7306
原文标题:【立体视觉】世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
CAD制图软件新手攻略:坐标系及标注坐标
解决电压方程在静止坐标系与运动坐标系转换问题
介绍坐标系和机器人之间的纽带即连杆坐标系

OPENGL坐标系介绍 世界坐标系和当前绘图坐标系区别

带你来剖析机器人的坐标系吧!
自动驾驶各个坐标系

三坐标如何建立坐标系?

工业现场相机坐标系和机械手坐标系的标定
深度剖析机器人的四大坐标系

机器人中都有哪些坐标系

应用卫星通信领域的一个坐标转换过程—机体坐标系与ENU坐标系的转换






 工商网监
工商网监
评论