 加速度计和陀螺仪的工作原理
加速度计和陀螺仪的工作原理
1.概述
椭球拟合是一种用于校准加速度计传感器的方法。该方法假设各轴之间相互直,加速度传感器在静止状态(只受重力的情况下),在三维空间中,各个姿态的x,y,z轴的重力点都在一个球面上。然而,由于各轴之间都会有偏差,所以各姿态重力点都落在一个椭球面上。椭球的中心即为加速度的偏移量,也就是校准值。 椭球拟合的核心方法是最小二乘法。 最小二乘法,也称为最小平方法,用于通过最小化残差的平方和来找到一条最佳拟合直线或曲线,从而找到自变量和因变量之间的关系。目的是:用于找到一组参数,使得模型的预测值与观测值之间的平方误差最小化。换句话说,它找到了最能代表变量之间关系的直线或曲线。它可以应用于线性回归、多项式回归和其他类型的回归分析。 而线性回归是一种基于最小二乘法的统计方法,用于建立自变量和因变量之间的线性关系模型。
2.加速度计的工作原理[1]
在这里再简单的单独介绍一下加速度的工作原理,前面也写过一篇《MEMS 惯性传感器 01-加速度计&陀螺仪工作原理》的博文详细介绍了加速度计和陀螺仪的工作原理。 我们依据姿态传感器的各轴的方向来想象有这样一个立方体的盒子,盒子里装有一个球。 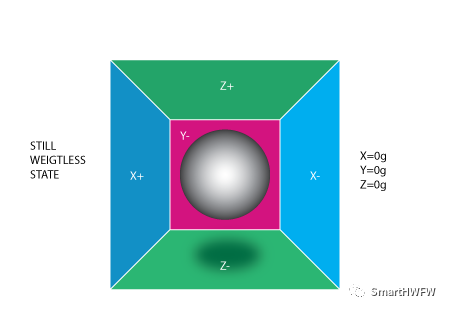
01
假设我们把这个盒子放进太空(没有重力场),此时处于静止状态,三个轴的加速值都为[0, 0, 0]g。 如果我们突然将盒子向左移动(以加速度 1g = 9.8m/s^2 加速它),球将撞到 X-。然后,我们测量球施加到 X- 的压力,并在X轴上输出[-1, 0, 0]g 的值。 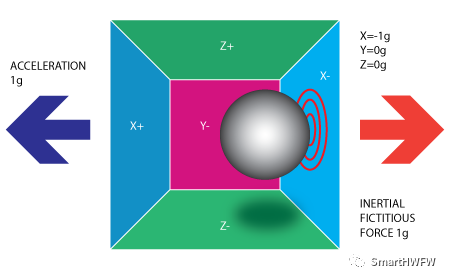 note:加速度计实际上将检测到与加速度矢量方向相反的力。
note:加速度计实际上将检测到与加速度矢量方向相反的力。
02
现在我们把立方体的盒子放在存在重力的地球上,Z 轴向上放在地球上,盒体内的球受到地球重力的影响会落在 Z- 内壁上,并在内壁上施加 [0, 0, -1]g 的值。在这种情况下,盒子没有移动,但我们仍然在 Z 轴上得到 -1g 的读数。球施加在内壁上压力是由重力引起的。 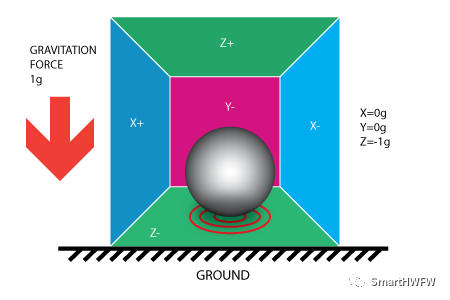
04
我们将盒子倾斜 45° 时,球将接触 Z 和 X- 两个面墙,将重力加速度正交分解,测得的X、Z轴的值为都为 [-g/√2, 0, -g/√2] 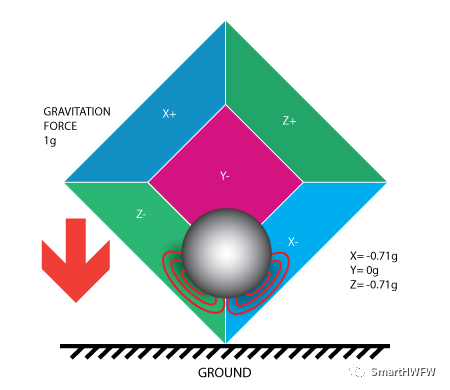
3.椭球拟合方法
01
椭球拟合算法描述 椭球拟合,可对多个位置(N)进行测量,并可进行组合以找到未知数(偏移、增益和交叉轴增益)。 和正六面体校准相比,正立面体需要准确的翻转传感器设备6次。 但是,对于椭球拟合,不需要知道传感器的真实参考源,因为唯一的要求是真实参考源的模数是常数(X、Y 和 Z 的平方和的平方根)。 对于加速度计的情况:要仅测量重力,传感器不得有任何其他加速度;那么真实参考源的模数就是重力的模数 椭球拟合算法数学理论可以在网上找很多,我参考阅读的是:椭圆/球拟合法推导(快速入门)这篇[2] https://blog.csdn.net/qq_39667840/article/details/106607279
02
椭球拟合流程 1)椭球面的标准方程为:  需要拟合的参数有六个,他们分别是椭球的中心和半轴长 2)将标准方程写成一般形式为:
需要拟合的参数有六个,他们分别是椭球的中心和半轴长 2)将标准方程写成一般形式为:  通过对参数a、b、c、d、e、f的求解间接求出参数 x0 、y0 、z0 、A、B、C 3)建立误差方程
通过对参数a、b、c、d、e、f的求解间接求出参数 x0 、y0 、z0 、A、B、C 3)建立误差方程  4)改写成目标函数
4)改写成目标函数  5)根据线性最小二乘理论,求最优解(即a,b,c,d,e,f)
5)根据线性最小二乘理论,求最优解(即a,b,c,d,e,f)  其中
其中 
 6)计算x0 、y0 、z0 、A、B、C
6)计算x0 、y0 、z0 、A、B、C  7)校准结果为:
7)校准结果为: 
4.C语言实现椭球拟合
01
源码
02
拟合计算出x0 、y0 、z0 、A、B、C 的值 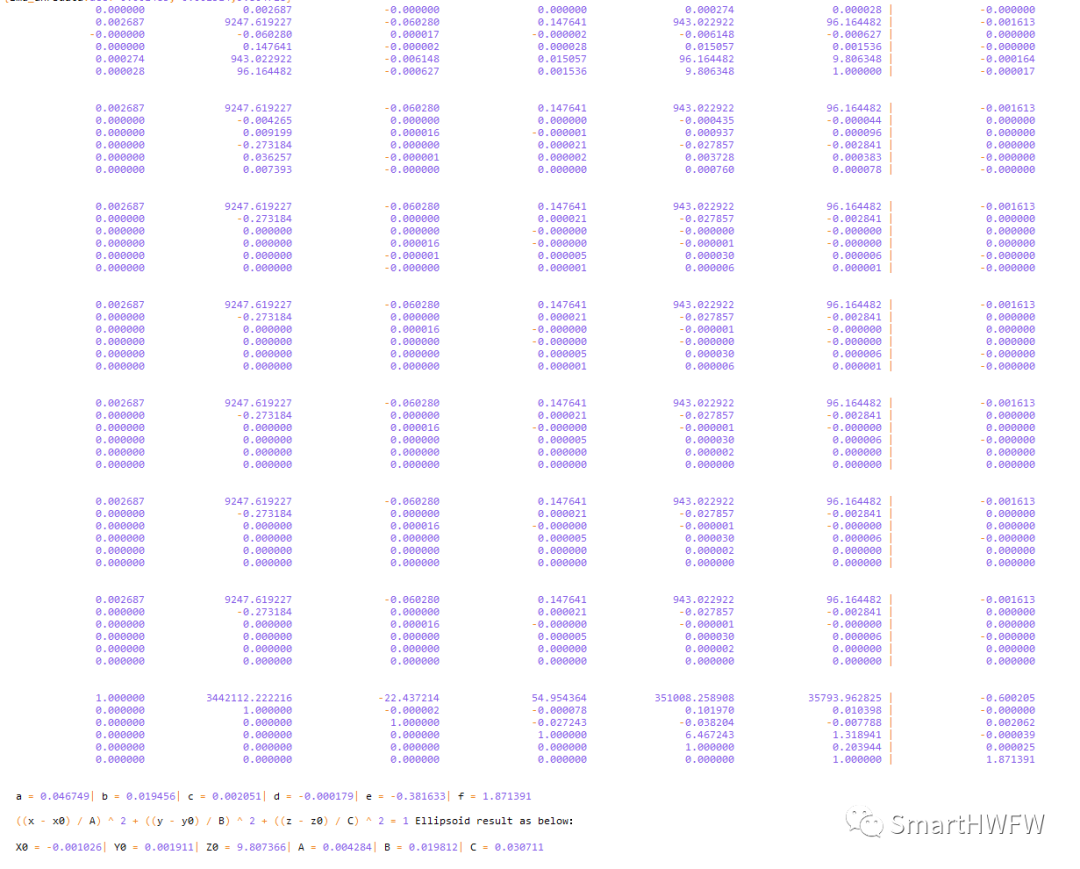
01
拟合加速度计的前/后数据对比 


4.椭球拟合校准效果演示
-
陀螺仪
+关注
关注
44文章
776浏览量
98511 -
加速度计
+关注
关注
6文章
696浏览量
45842 -
模型
+关注
关注
1文章
3133浏览量
48666
原文标题:MEMS_惯性传感器15 - 加速度计校准的椭球拟合方法(基于QMI8658 姿态传感实现演示)
文章出处:【微信号:SmartHWFW,微信公众号:SmartHWFW】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
陀螺仪LSM6DSOW开发(2)----上报匿名上位机实现可视化

请问为什么陀螺仪需校准而加速度计不需?
介绍加速度计和陀螺仪的数学模型和基本算法
介绍加速度计和陀螺仪的数学模型和基本算法
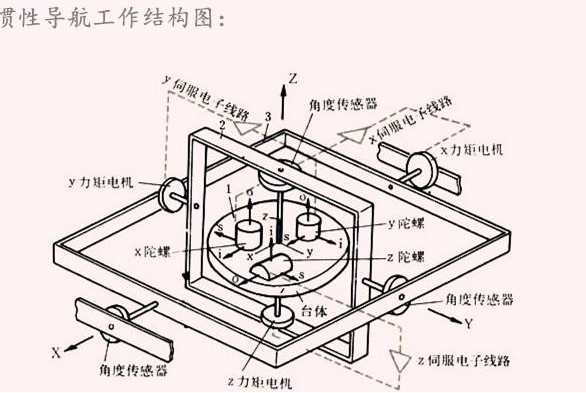
三分钟了解惯性导航系统、加速度计、陀螺仪的工作原理
加速度计和陀螺仪的参数意义







 工商网监
工商网监
评论