 让自动驾驶汽车“看透”拐角
让自动驾驶汽车“看透”拐角
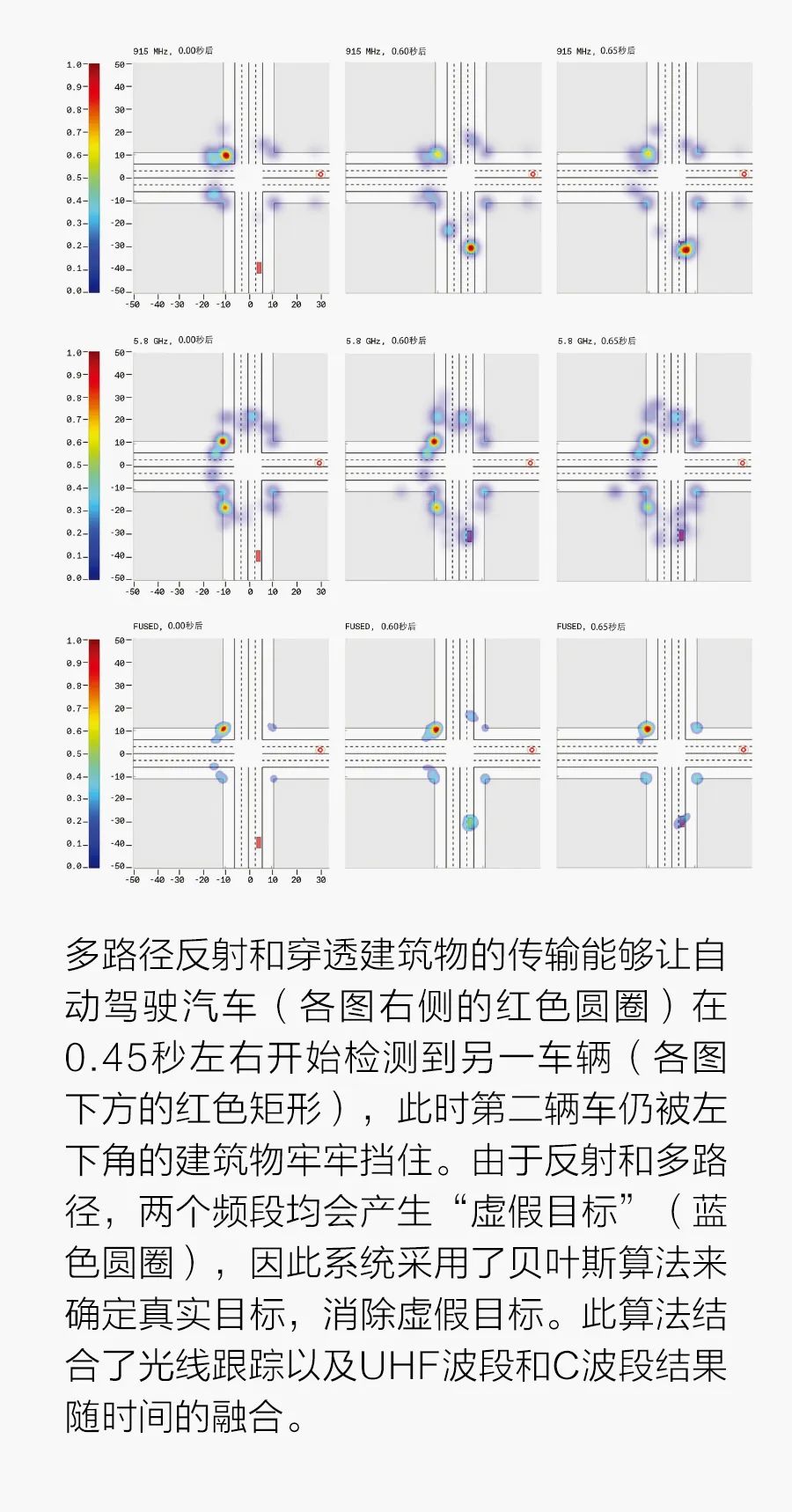
基于驶近城市十字路口(拐角处有4栋高层混凝土建筑)的一辆自动驾驶汽车的建模,可以对自动驾驶汽车看清拐角路况的情形进行仿真。另一辆车正从某方向靠近路口中心,尽管超出了自动驾驶汽车的视距,系统仍可通过处理多条路径反射回来或直接穿过建筑物返回的信号检测到该车辆。
要让自动驾驶汽车名副其实,需满足诸多要求,但毫无疑问,对环境的感知和了解最为关键。自动驾驶汽车必须跟踪并识别多个物体和目标,无论其清晰可见还是隐而不见,无论艳阳高照还是狂风暴雨。
光靠如今的雷达还远不足以实现这种效果,我们还需要摄像头和激光雷达,但若能充分利用雷达的特殊优势,也许至少可以省去部分辅助传感器。
诚然,立体模式下的传统摄像头可以检测物体、测量物体距离并估算物体速度,但其精度无法达到完全自动驾驶的要求。此外,摄像头在夜间、有雾或阳光直射的情况下均无法正常工作,使用传统摄像头的系统很容易被视错觉欺骗。激光扫描系统或激光雷达自带照明往往在恶劣天气下的确优于摄像头。尽管如此,它们也只能在清晰视距内看到前方,在被建筑物或其他障碍物遮挡的情况下,无法检测到接近十字路口的汽车。
雷达的测距精度和角分辨率不如激光雷达高,角分辨率是在两个不同目标之间分辨出其中一个目标所需的最小到达角。不过,我们设计了一种新颖的雷达架构,克服了此类缺陷,使其在增强激光雷达和摄像头方面更加有效。
我们提出的架构采用了稀疏、大口径多波段雷达。其基本理念是使用多种频率,利用各频率的特定属性,将系统从多变的天气条件中解放出来,透视并环顾观察路口情况。反过来,该系统采用了先进的信号处理和传感器融合算法来生成环境的集成表示。
我们已通过试验验证了该雷达系统的理论性能极限,包括有效距离、角分辨率和精度。目前,我们正在为多家汽车制造商构建硬件以进行评估,且最近的道路测试已取得成功。我们在2022年年初进行了更精细的测试,以展示该系统的路口转角感知性能。
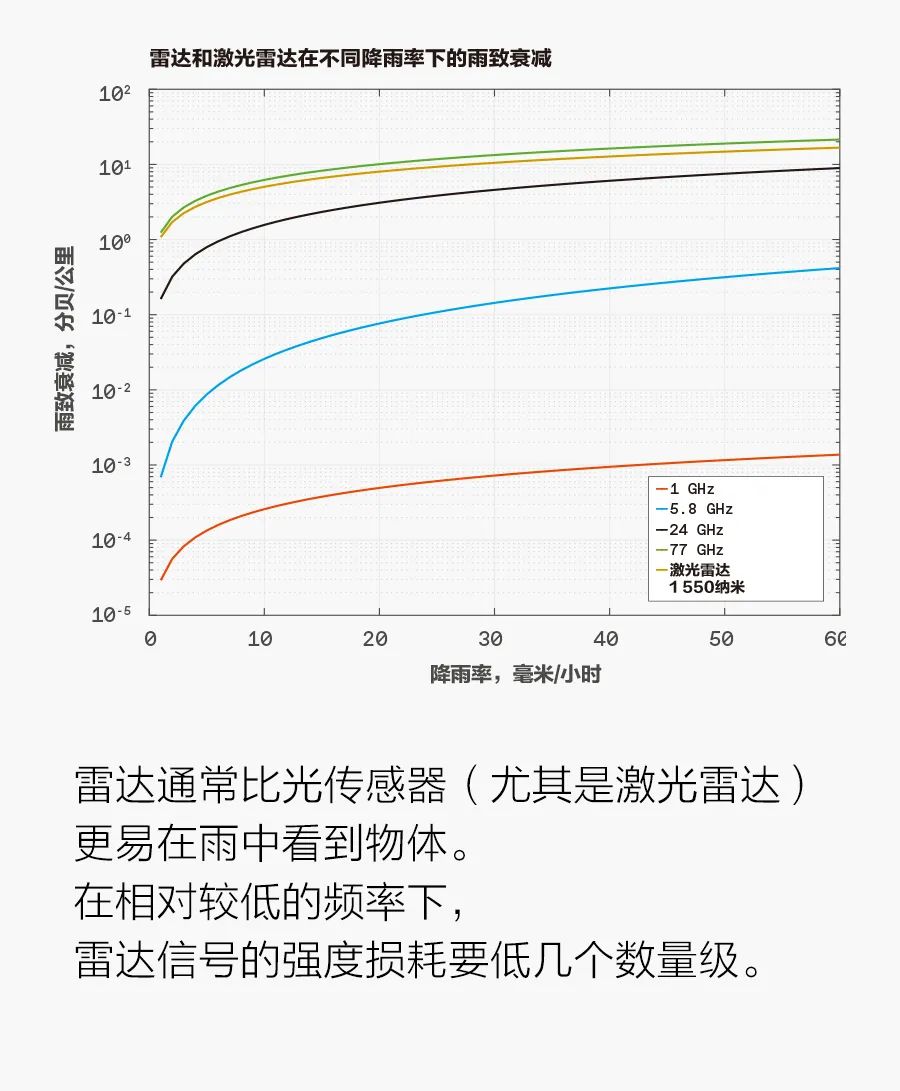
每个频段皆有其优点和缺点。77千兆赫(GHz)及以下的频段可穿透1 000米的浓雾,且损耗的信号强度不超过1分贝(dB)。相比之下,激光雷达和摄像头在50米的浓雾中便会损耗10到15分贝。
雨水则是另一种情况。即便是小阵雨,也会令77GHz雷达像激光雷达一样衰减。你可能会想,这没问题,改成更低的频率就行。毕竟,在1GHz或更低的频率下,雨对雷达而言可以说是透明的。
低频确实可行,但我们也需要高频段,因为低频段的有效距离较短且角分辨率较低。尽管高频未必等同于窄波束,但可以使用天线阵列或高度定向天线,以窄波束投射较高频段中的毫米波,就像激光那样。这意味着这种雷达可以与激光雷达系统一争高下,尽管它同样存在视距之外无法观测的问题。
对于给定尺寸(即给定阵列孔径)的天线,波束的角分辨率与工作频率成反比。同样,为了实现给定的角分辨率,所需的频率与天线尺寸成反比。因此,若要在相对较低的超高频(UHF,0.3 ~1GHz)下依靠雷达系统获得所需的角分辨率,需要的天线阵列是K波段(18 ~27GHz)或W波段(75 ~110GHz)雷达所需天线阵列的数十倍。
尽管较低的频率对提高分辨率并无多大帮助,但它有其他优势。电磁波往往会在尖锐的边缘衍射;遇到曲面时,它们会在周围以“爬行”波的形式衍射。这些效应太弱,无法在K波段的较高频率下产生效果,W波段尤为如此,但在UHF和C波段(4 ~8GHz)可能效果显著。这种衍射行为以及较低的穿透损耗使此类雷达能够检测到拐角处的物体。
雷达的一个弱点在于它会遵循多条路径,在往返抵达被跟踪物体的途中会被无数物体反射。由于道路上存在许多其他汽车雷达,因此雷达的回波更为复杂。不过,多次反射也有另一个优势:范围广泛的弹跳可为计算机提供信息,反映沿视距投射的光束无法到达处所发生的情况,例如,揭示直接探测无法看到的交叉路口的路况。
看得远,看得到细节,看得清侧面,甚至能够直接穿透障碍物,这是雷达尚未完全实现的目标。没有一个雷达频段可单独实现所有效果,但一个可在多频段同时运行的系统却可以非常接近这一目标。例如,K波段和W波段等高频段可实现高分辨率,同时准确估计目标的位置和速度,但它们无法穿透建筑物的墙壁或看清角落情况;更重要的是,它们容易受到大雨、大雾和灰尘的影响。
UHF和C波段等较低频段不太容易受到上述问题的影响,但它们需要更大的天线元件且可用带宽较少,这会降低测距分辨率,测距分辨率是区分方位相似但距离不同的两个物体的能力。要达到既定角分辨率,较低的频段还需要大孔径。通过将不同频段组合在一起,我们可以平衡某个频段的弱点和其他频段的优势。

不同的目标给我们的多频段解决方案带来了不同挑战。汽车前部在UHF波段的雷达截面(或有效反射率)比C波段和K波段的要小。这意味着使用C波段和K波段更容易检测到正在靠近的车辆。此外,与C波段和K波段相比,在UHF波段,行人的不同行进方向和步态给其截面带来的变化要小得多。这意味着行人将更容易被UHF雷达探测到。
此外,当散射体表面有水时,物体的雷达截面会减小。这就减少了C波段和K波段可测到的雷达反射,但是此现象不会对UHF雷达产生明显影响。
另一个重要区别在于较低频率的信号可穿透墙壁、穿过建筑物,而较高频率的信号则无法做到这一点。以一堵30厘米厚的混凝土墙为例,雷达波穿过墙壁而非被墙壁反射的能力可通过波长、入射场的极化和入射角的函数计算。UHF频段在大范围入射角的传输系数约为-6.5dB。C波段和K波段的该数值分别下降为-35dB和-150dB,这意味着可以通过的能量很少。
如前所述,雷达的角分辨率与所用波长成正比,而角分辨率还与孔径宽度成反比,对于线性阵列天线而言,它与阵列的物理长度成反比。这就是毫米波(如W波段和K波段)可以很好地用于自动驾驶的原因之一。一个基于两个77GHz收发器、孔径为6厘米的商用雷达装置的角分辨率约为2.5度,与典型的激光雷达系统相比,其差值在一个数量级以上,这对自动驾驶而言太低。在77GHz下实现激光雷达标准分辨率需要更大的孔径(如1.2米),约等于汽车的宽度。
除了达到一定的有效距离和角分辨率之外,汽车的雷达系统还必须跟踪大量目标,有时需同时跟踪数百个目标。若目标与汽车的距离仅相隔数米,则可能很难按距离区分目标。在任何给定距离内,一个均匀的线性阵列(发射和接收元件等距分布)能够区分的目标数量与其天线数量相同。因此,在可能存在大量目标的杂乱环境中,需要数百个类似的发射器和接收器,而且巨大的孔径会使问题更复杂。如此之多的硬件也会大幅拉高成本。
使用阵列是解决此问题的一种方法,阵列中的元件只占用通常情况下的一部分位置。如果仔细地设计这样一个“稀疏”阵列,使其相互的几何距离都是唯一的,便可使其性能与非稀疏的全尺寸阵列相同。例如从一个K波段运行的1.2米孔径雷达入手,放入设计合理的稀疏阵列,该阵列只有12个发射元件和16个接收元件,则它的性能与拥有192个元件的标准阵列相同。其原因在于,精心设计的稀疏阵列在每个发射器和接收器之间可实现多达12×16(即192)个成对距离。使用12种不同的信号传输,16个接收天线将接收192个信号。由于各发射接收对之间的成对距离唯一,因此所得到的192个接收信号就像是由192个元件的非稀疏阵列接收的一样。所以,借助稀疏阵列,我们可以用时间换取空间,即使用天线元件进行信号传输。
原则上,沿车载的假想阵列放置的单独雷达单元应作为更大孔径的单个相控阵单元运行。然而,该方案需要单独子阵列的各发射天线联合传输,并联合处理联合子阵的各天线单元收集的数据,这又反过来要求所有子阵列单元的相位完全同步。
这一切都不容易实现。即便可以实现,这种完全同步的分布式雷达的性能仍然远远落后于精心设计的完全集成、大口径稀疏阵列雷达。
假设有两个77GHz的雷达系统,每个系统的孔径长度为1.2米,配备12个发射元件和16个接收元件。第一个系统是精心设计的稀疏阵列;第二个系统的孔径最外侧则有两个14元件标准阵列。这两个系统的孔径和天线元件数量相同。尽管集成稀疏设计的扫描效果相同,但分离式设计难以从阵列前部直视前方。这是因为两束天线相距甚远,其中心产生了一个盲点。
在采用分离式设计的场景下,可假设两种情况。第一种情况下,分离式系统两端的两个标准雷达阵列几近完全同步。此设计有45%的时间无法检测到物体。在第二种情况下,假设各阵列独立运行,然后将其各自独立检测到的对象融合在一起。这一设计有几乎60%的时间都会检测失败。相比之下,精心设计的稀疏阵列检测失败的可能性微乎其微。
通过仿真,我们可以轻松描绘出拐角处的景象。假设一辆配备了我们系统的自动驾驶汽车正在靠近一个城市十字路口,路口的4个角落各有一栋高层混凝土建筑。仿真开始时,车辆距离交叉路口中心35米,第二辆车正通过交叉路口接近中心。正在靠近的车辆不在自动驾驶汽车的视距范围内,因此,如果不使用街角环视技术便无法检测到驶近的车辆。
雷达系统在3个频段中的各频段均可预估视距内目标的距离和方位。在这种情况下,目标的距离等于光速乘以发射的电磁波返回雷达所需时间的一半。目标的方位则通过雷达接收到的波前入射角确定。当目标不在视距范围内且信号沿多条路径返回时,此方法无法直接测得目标的距离或位置。
不过,我们可以推断目标的距离和位置。首先,我们需要区分视距、多路径和穿过建筑物的返回波。在给定距离内,多路径返回波(由于多次反射)通常较弱且极化不同。穿过建筑物的回波也较弱。如果我们知道基本环境(建筑物和其他静止物体的位置),便可以构建一个框架,找出真实目标的可能位置。然后,我们可使用该框架来估测目标在某个位置的可能性。
随着自动驾驶汽车和各目标的移动,雷达会收集到更多数据,每条新的数据都可用于更新概率。这就是贝叶斯逻辑,与其在医学诊断中的应用十分类似。病人有无发热?如发热,是否出现皮疹?同样,汽车系统每一次更新估算值,都会缩小可能的范围,直至最终显示真实目标的位置,同时消除“虚假目标”。通过融合从多个频段获得的信息,可显著提高系统的性能。
我们通过试验和数值仿真模拟评估了雷达系统在各种操作条件下的理论性能极限。道路测试证实,雷达可检测到被遮挡的信号。接下来的几个月,我们计划展示转角感应。希望此类功能能够实现前所未有的安全驾驶方式。
-
摄像头
+关注
关注
59文章
4839浏览量
95639 -
激光雷达
+关注
关注
968文章
3971浏览量
189875 -
自动驾驶
+关注
关注
784文章
13798浏览量
166421
原文标题:让自动驾驶汽车“看透”拐角
文章出处:【微信号:WW_CGQJS,微信公众号:传感器技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
MEMS技术在自动驾驶汽车中的应用


自动驾驶技术的典型应用 自动驾驶技术涉及到哪些技术
聊聊自动驾驶离不开的感知硬件
FPGA在自动驾驶领域有哪些优势?
FPGA在自动驾驶领域有哪些应用?
自动驾驶汽车如何识别障碍物
自动驾驶汽车传感器有哪些
吉利与Foretellix合作开发自动驾驶汽车
未来已来,多传感器融合感知是自动驾驶破局的关键
大众汽车和Mobileye加强自动驾驶合作

自动驾驶发展问题及解决方案浅析
Waymo自愿召回444辆自动驾驶汽车 L4的自动驾驶还有很多路要走






 工商网监
工商网监
评论