 结构光三维测量几种比较成熟的方法分享
结构光三维测量几种比较成熟的方法分享
1.飞行时间发
原理:通过直接测量光传播的时间,确定物体的面型。发射脉冲信号,接受发射回的光,计算距离。
精度:毫米级
优点:原理简单,可避免阴影和遮挡等问题,且仪器便携化。
缺点:精度相对较低
2.莫尔条纹法
原理:采用两组光栅,一个主光栅,一个基准光栅,通过基准光栅来检测轮廓表面的主光栅,并根据条纹规律来推算物体的轮廓面型。
优点:过程运算量小,比较容易实现快速测量。
缺点:单从莫尔等高线不能判定物体凹凸,且光栅制作存在局限性,一般应用于工业在线质量检测。
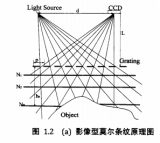
主要两类:影像型莫尔条纹和投影型摩尔条纹
①影像型摩尔条纹
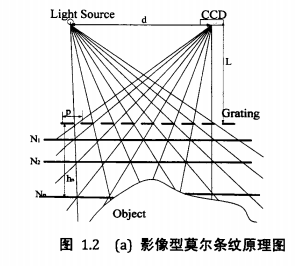
优点:测量精度高
缺点:要求较大光栅面积,至少覆盖待测轮廓,且光栅要紧挨待测物体
②投影莫尔法
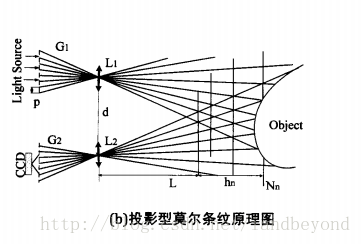
将一个光栅投射到被测物体上,旁边使用另一个光栅观测行程的摩尔条纹,分析观测到的摩尔条纹,就可得到深度信息。
优点:适合测量较大物体。
3.立体视觉法
原理:由多幅图像(一般两幅)来获取物体三维几何信息的方法。主要模仿生物,几乎所有具备视觉的生物,都是两个眼睛。利用成像设备从不同位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体的三维几何信息。
优点:原理简单,对材质颜色等物面性质及背景光等环境因素要求较低,在超大型三维测量如建筑物测量中具有不可替代的优势。 缺点:系统需要预先标定,当测量环境发生变化时,相机参数需要重新调节。很难获取无纹理区域的信息。
4.激光三角法
原理:线扫描法的一种,是用线光源投射到待测物体表面,然后经过一侧一维的扫描,获得整个物体的深度信息。
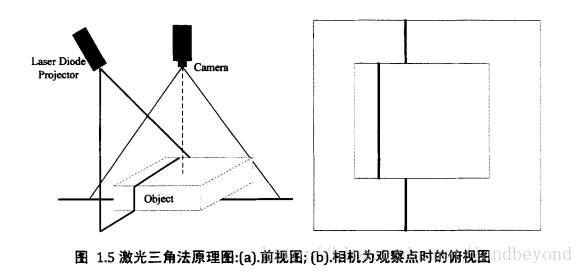
每次投射器投射一条光线到物体上,摄像机对带有光条纹的物体成像,图像上的光线特征恰恰对应投射器的光线。根据三角测量原理,可确定落在物体上光线的深度信息。
优点:原理简单,精度较高,因为使用单色性好的激光使得这种方法很少受物体表面纹理的影响相对较稳定,因此激光三角法在精度要求较高、环境较为复杂的工业检测领域,应用非常广泛
缺点:由于单帧图像得到的信息非常有限,激光三角法还需要一次一维的移动扫描,这也导致该方法效率较低。
5.结构光技术
是一种主动的三角测量技术。
原理:由光源投射可控制的光点、光条或光面结构,光在物体表面形成特征点,线或者面,并由成像系统捕获图像, 得到特征点的投射角,然后根据标定出的空间方向、位置参数,利用三角法测量原理计算特征点与摄像机镜头主点 之间的距离。
几种比较典型的编码结构光方式:
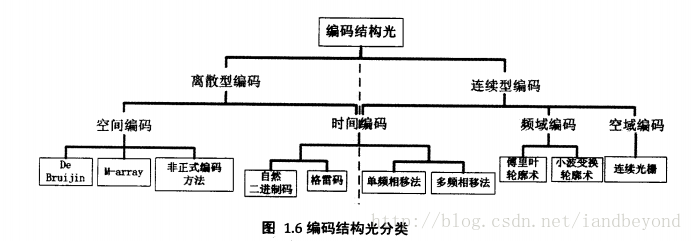
根据编码图案,将编码结构光分为了离散编码和连续编码两大类。
如图1.6所示。若沿着一行扫描编码结构光的数字投影条纹图案,我们会发现离散编码的图案中, 码字(codeword)相同的区域其扫描轮廓线的值也是一样的, 而相同码字区域的大小也很大程度上代表了重构出来的三维点云的密度; 然而,在连续编码图案上,扫描轮廓线则为一条连续平滑的亮度曲线,在一个周期内每个像素都有唯一的码字, 正是如此,该方法才能够获得与图像分辨率相当的点云密度。 而时间编码则是使用同一个像素点不同时间下的多个码字来确定该点的位置信息。
当然,也有一些方法结合时间和空间策略共同确定位置信息。
离散型空间编码方法大致可以分为三类:基于De aruijn的编码方法,基于M.array的编码方法,非正式的编码方法。
离散型时间编码方法主要代表有:自然二进制编码,Gray码。
离散型编码可以通过空间域或时间域进行编码实现。
空间编码和时间编码是通过码字解码的方式不同来区分的,空间编码需要周围相邻码字共同确定中心码字的位置信息,
理论上讲,连续性编码方法既可以采用周期性模式,也可以采用非周期性模 式。然而非周期性模式往往限制了模板大小,目前图像亮度等级有限,只有256 级的情况下,无法绝对唯一地标识大范围空间。因此,周期性模式图像配合时间 域交叉技术获得广泛认可。
连续性编码方案中,最具有代表性的是相移轮廓术和傅里叶轮廓术。
①傅里叶变换轮廓术
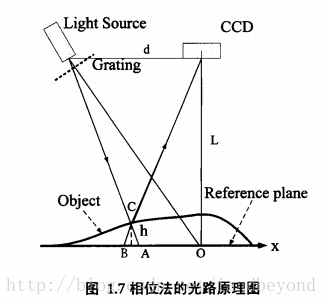
图1.7所示。轮廓测量法利用数字滤波技术,将频率较高的载波和频率较低的面形分离出来,然后进行反变换,
得到包含高度信息的相位,在通过标定得到的相位高度映射关系得到三维面型信息。傅里叶变换轮廓术只用一
幅图就可以得到相位值测量面型信息,但该方法计算量大,使用FFT产生的泄漏、混频、栅栏效应等会产生误差,
采用数字滤波器也需要不断试错才能得到正确的参数。
②相位测量轮廓术
相位测量轮廓术(PMP:Phase Measurement Profilometry)的基本思想就是
通过3F(F为相移法中采用的频率个数)张具有一定相位差的条纹图来计算相位,然后再结合相位-高度映射关系式
计算出物体的高度分布。
相位测量轮廓术的原理同样如图1.7所示,将正弦光栅图像投影到物体表面,同时用成像设备采集变形条纹。
然后开始投影第二帧正弦光栅图案,同时采集这一帧的变形条纹……整个过程重复Ⅳ次,而每一帧图案相对前一帧
的相移为2,r/N。
典型的几种算法被广泛应用于实际测量中,分别是三步相移法,四步相移法,五步相移法和六步相移法。
相比傅里叶轮廓术,相位测量轮廓术运算量要小很多,而且可以用查表法进一步降低运算量,这使得相位测量轮廓术在高速高精度实时三维测量中运用的非常广泛。
作者为CSDN博主iandbeyond,
原文地址:https://blog.csdn.net/iandbeyond/article/details/79256932
审核编辑:刘清
-
编码器
+关注
关注
45文章
3642浏览量
134502 -
激光器
+关注
关注
17文章
2516浏览量
60358 -
脉冲信号
+关注
关注
6文章
399浏览量
36969 -
傅里叶变换
+关注
关注
6文章
441浏览量
42600
原文标题:结构光三维测量几种比较成熟的方法
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
常见的三维测量方法有哪些(结构光编码原理)

SMARTSCAN三维扫描仪电子产品配件三维扫描服务
结构光三维测量中影响光条中心提取的若干因素及对策
面向踝关节功能的三维测量与重建系统设计

智慧城市_实景三维|物业楼三维扫描案例分享_泰来三维

双目三维光学测量硬件系统结构设计







 工商网监
工商网监
评论