 VASS大众设置快换头Docken说明
VASS大众设置快换头Docken说明
为了对接,必须在WorkVisual中配置参与对接过程的参与者。使用示例结构,说明所需的设置。
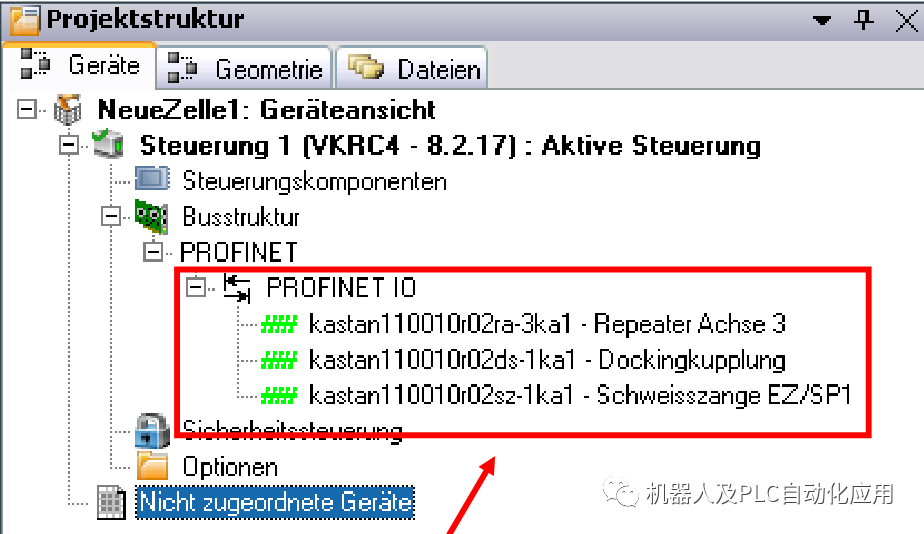
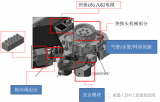
对接系统示例。考虑轴3。以下组件直接参与对接过程:
-对接联轴器:固定一半
机器人换刀系统(Walther示例)
-焊钳EZ/SP 1:待对接的部件(例如Festo焊钳)
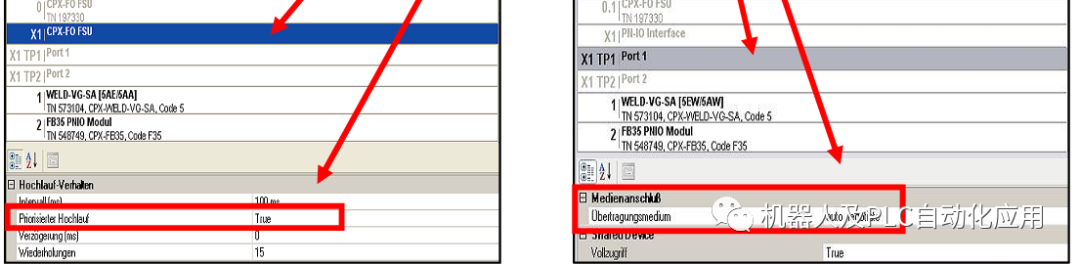
在对接组件上,优先级引导必须设置为“True”。
端口“自动协商”传输介质的默认设置用于对接耦合器和对接组件(仅适用于光纤连接)
为了避免在控制器启动时产生电子总线错误,必须在设备设置中将要对接的订户声明为“不总是可用”。参与者通过需要用户ID的对接命令进行对接和卸载。
请注意,当控制器启动时,参与者处于abdockt状态。还请注意,快速启动是从第二次启动时激活的。
注意:根据应用程序的不同,停靠时不必单独投影所有参与者。一个参与者的配置就足够了(例如,如果所有码头参与者都要使用相同的地址范围)。应该注意的是,在这种情况下,所有组件的结构必须相同(物理上,设备名称)。
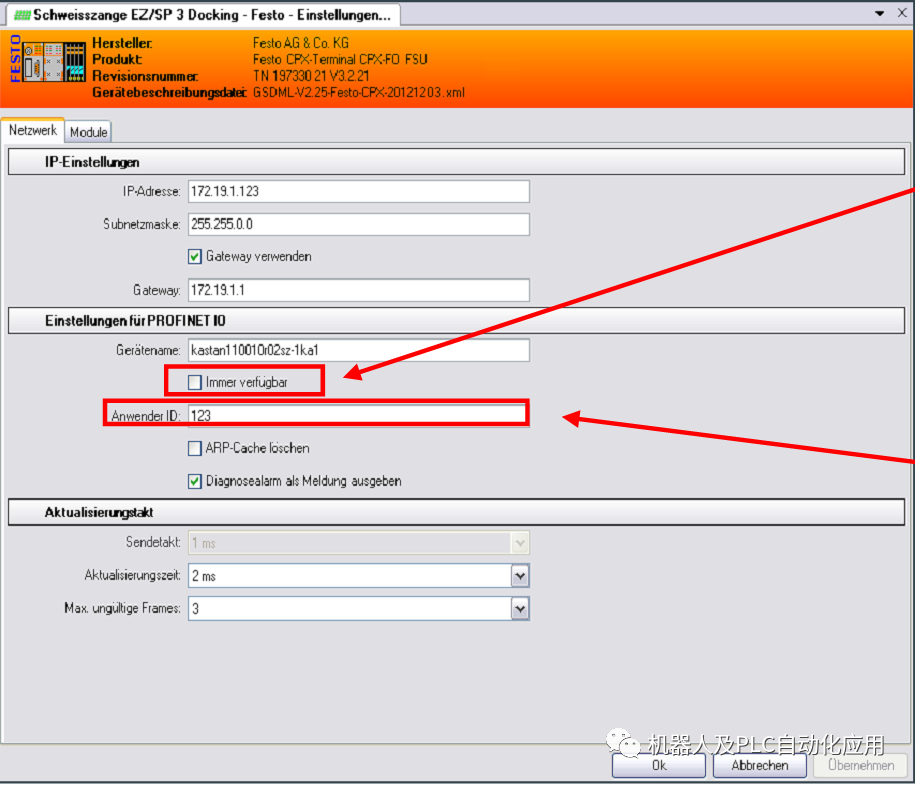
参与者可用性的参数化。对接时,参与者被预测为“并非总是可用”。
要停靠的订阅服务器的用户ID,用于停靠命令。
Docken - Greifer
当停靠在WorkVisual中仅投影一次的多个夹具时,必须确保待停靠的夹具在物理上与投影位置完全对应(见示例)。如果实际和目标之间不一致,诊断消息可能同时出现在KCP和设备上的auch(SF-LED)中。
为确保安全的 PROFINET 通信,必须根据下表配置 PROFINET 组件的更新时间。 请注意,所有设备都有自己的最短更新时间。 如果这高于表中的规格,则必须为设备设置此最短更新时间。

标准用户应用焊枪,焊接控制,铆钉伺服,铆接伺服,胶合,MIG-MAG,视觉,激光应用
•非时间关键应用程序
•RIP,对接,搬运/夹具,螺栓焊接,冲孔,螺母卷边,拧紧系统
•没有输入和输出的组件
•中继器轴3,中继器轴1,交换机
-
控制器
+关注
关注
112文章
16339浏览量
177851 -
配置
+关注
关注
1文章
188浏览量
18375
原文标题:VASS 大众设置快换头Docken说明
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
遗体换头手术成功,换头手术离真正的成功还远吗?
网络设置的详细方法资料说明
换电和快充,谁能引领新能源汽车的未来?
史陶比尔快换头详解.
博途VASS06的CPU设置要求
浅谈机器人快换盘的安全性
大众VASS06报警信息提示功能
大众VASS V6标准中文手册及PLC程序模板下载






 工商网监
工商网监
评论