 软件定义雷达(SDR)和软件化雷达(SR)
软件定义雷达(SDR)和软件化雷达(SR)
在如今4D毫米波雷达遍地横行的年代,出现了一些新的概念。
4D毫米波雷达与传统雷达不同,为了解决传统毫米波雷达角分辨率低、点云密度低的问题,当下出现了四种4D毫米波雷达解决方案:
一是基于传统CMOS雷达芯片,强调“软件定义的雷达”,主要厂家有傲酷、Mobileye、Zadar等。
二则是将多发多收天线集成在一颗芯片,直接提供成像雷达芯片,比如Arbe、Vayyar等。
三是最传统的,即将标准雷达芯片进行多芯片级联,以增加天线数量,比如大陆、博世、ZF等一众公司。
四则是通过超材料研发新型雷达架构,代表厂家有Metawave等,Metawave采用波束扫描方式提高角度分辨率。
其它三种都容易理解,什么是软件定义的雷达,它和软件化雷达有什么区别?今天就在这里简单和大家聊聊。
软件定义雷达、软件定义的雷达、软件化雷达、雷达软件化、软件定义无线电,这些概念有点懵。经过分析可以确定,软件定义雷达,就是软件定义的雷达;软件化雷达(SR)和雷达软件化,前一个是名词,后一个是动词,其实最终都是指代同一个东西。软件定义无线电(SDR,Software Defined Radio)和软件定义雷达(SDR,Software Defined Radar)有相似的模块,只是最终的功能不同。
1、软件化雷达
有软件化雷达,就应该有“硬件化雷达”,其实最开始的雷达就是纯粹由硬件来实现的,可以看作是“硬件化雷达”,但这导致了雷达功能的单一性和固定性,决定了只能依靠更改系统的硬件来改变系统的参数,不利于雷达装备的研制、生产和维护。简单举个例子,比如,某个模块需要换方案,这样雷达就需要从硬件上进行更改,耗时费力,且该模块具有定制特性,无通用特性,每次修改方案都要重新设计,因此纯粹由硬件搭建的雷达会直接影响雷达装备的通用化和标准化建设。
软件化雷达通过软件界面来表示功能,并能够根据功能需求来驱动整个软件雷达系统的开发,具备良好的通用性、兼容性和可扩展性。其核心思想是:在满足雷达性能的前提下,能用软件实现,就绝对不用硬件实现,更改代码可比更改硬件简单多了。
软件化雷达是对从雷达显控终端到雷达数据采集卡的功能逐步由软件实现的过程,且功能越来越靠近天线,具有高度的灵活性、开放性和完全可编程性。
雷达传感器:雷达传感器是为雷达服务器输入雷达原始数据(雷达回波信号)的设备,主要包括雷达射频天线、天线收发开关、雷达接发机等雷达前端的硬件模块。将雷达传感器看作独立的模块,是整个软件化雷达开放式系统设计最直接的体现,使得软件化雷达设计不再局限于某个型号雷达前端硬件设计,实现了真正意义上的软件雷达的通用性、开放性和灵活性。
雷达服务器:雷达服务器是实现雷达视频信号采集、信号处理、数据处理等功能的设备。
(1)射频就是调制后的微波频段,“射”字不可以单独理解为发射。发射机调制器(激励器)出来的,包括到强放、天线开关、各种波导、合路器、传输系统、直到喇叭口等都叫射频。(硬件在发射机、传输系统、天线)。
(2)基带就是去调制器的弱信号。巴克码脉冲、各种脉冲信号。(硬件在发射机里)。
(3)中频就是接收机经过混频变频回来的信号。(硬件在接收机里)。
(4)视频就是中频经过各种滤波、各种网络处理之后送去显示器的信号。(硬件在控制台里)
雷达显控终端:雷达显控终端是能接收雷达视频信号,并对接收到的信号进行显示和控制的设备。将雷达显控终端作为一个单独的模块进行设计实现了雷达“显示”和“处理”的分离,使得系统具有更强的兼容性、可扩展性,灵活性。
但是如何才能够使雷达具备这样的功能呢?
雷达对信号采集、处理实时性要求很高,并且需要执行大量的数学函数运算;通用硬件可以满足处理的实时性,但是难以满足数学运算的全部功能。软件实现的信号处理,容易达到算法精度要求,但实时性问题又不能满足。面对如此矛盾的问题,能够寻找到一个能够快速、高精度实现雷达信号采集的方法是问题的关键。
FPGA能够进行一些简单的运算,且处理精度、功能完善程度优于一般的电子硬件。在一定程度上既可以满足雷达信号采集、信号简单处理的实时性要求,又能保证误差在一定的范围内,因此在雷达数字信号处理领域具有非常广阔的前景,可以用于高速数据采集、存储和传输,如果读者有兴趣,可以将FPGA和雷达结合起来学习。
由于雷达数据量比较大,且要求实时传输和处理,雷达显控终端和雷达服务器分别需要两台计算机,既要处理速度,也要充足的内存。
软件化雷达的系统设计框图如下所示:
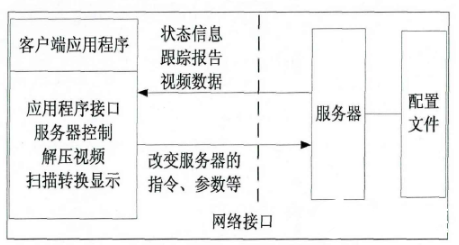
图1 软件化雷达结构框图
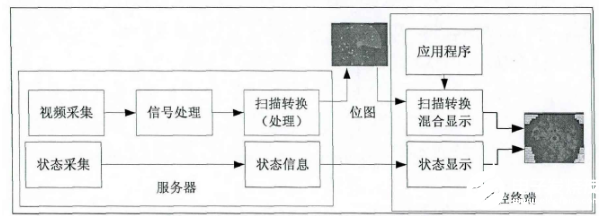
图2软件化雷达处理和显示框图
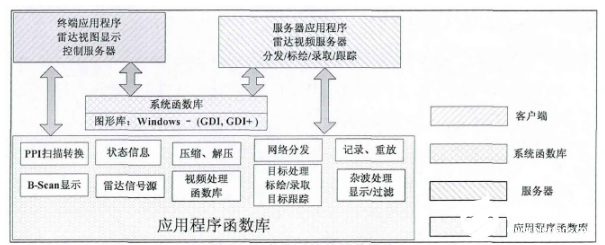
图3 软件化雷达的软件模块
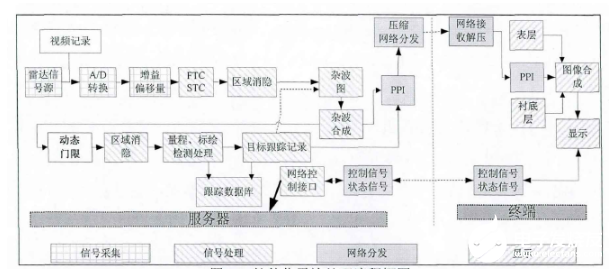
图4 软件化雷达处理流程
总结:“软件化雷达”的核心特征体现在:标准化、模块化和数字化特征、开放式的体系架构以及“以软件技术为核心,面向应用需求的开发模式和传统的“以硬件技术为核心面向专用功能的开发模式不同,软件化雷达注重软件和硬件的解耦,从而使得可以通过软件定义方式快速开发雷达系统,并灵活地实现系统资源配置、 功能扩展和性能提升,以满足实际应用的需求。
2、软件定义雷达
软件定义雷达是指雷达的内部模块可通过软件配置,软件定义雷达框图如下图所示。
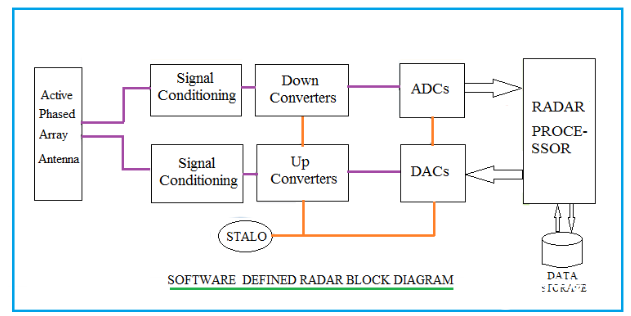
上图描述的软件定义雷达框图,主要由以下模块组成:
(1)射频/微波部分:由信号调理模块组成, 上变频器和下变频器,本地振荡器和有源相控阵天线。
• 信号处理模块:具备多个通道,可处理模拟信号。
• 上变频器: DUC,即数字上变频器。
• 下变频器: DDC,即数字下变频器。
•本振:它们是高度稳定的本振,用于在 DUC、DDC、DAC 和 ADC 之间提供非常精细的同步。
• 有源相控阵天线:该天线阵列负责多种无线电信号发射和接收。
(2)中频/基带部分:由高采样ADC和DAC组成。ADC/DAC支持宽输入信号带宽,高采样速率ADC/DAC可用于直接采样发射器和直接采样接收器设计。
• ADC:执行模数转换,处理DDC接收的数据,ADC的数据输出给处理器进行进一步处理。
• DAC:执行数模转换,处理要传输的雷达数据并输入DUC。
(3)雷达处理器和数据存储模块。
• 雷达处理器:开发复杂的信号处理算法,并将其移植到软件定义雷达的处理器上。
• 数据存储模块负责根据用户要求提供结果存储。
软件定义雷达架构的优势
(1)软件配置的模块允许工程师使用通用的可用硬件集快速原型化和测试、验证所选的先进雷达系统。
(2)软件定义的雷达得益于软件定义无线电模块的大量可用性,采用易于集成现成的模块,将节省大量的时间和研发成本。
(3)软件定义的雷达有助于分析具有非常宽信号带宽的无线电信号。
3、结论
软件定义雷达和软件化雷达是两种不同的雷达技术,初学者很容易混淆这两个概念,因此在这里我按照自己的理解,搜集整理了一些资料,希望能够说清楚。
软件定义雷达是一种可以通过修改或更新软件来配置和控制雷达的工作方式的雷达系统。通过将雷达的信号处理、信号发射功能转移到软件中实现,从而使得雷达可以通过改变软件来实现不同的功能,比如单芯片毫米波雷达,可通过软件来控制、配置雷达,并用软件实现雷达信号处理、数据处理和其他高级算法等功能。我理解的软件定义雷达主要体现一种灵活修改雷达的工作方式为核心,还是要以雷达芯片为中心,需要依靠硬件设计不同的算法实现需要的功能。
软件化雷达是一种通过软件编程来替代雷达硬件的雷达系统,是通过软件来替代雷达硬件,从而通过将雷达的所有功能都嵌入到软件中实现,从而使雷达变得更为灵活和可靠,以及实现标准化。我理解的软件化雷达主要体现在雷达几乎所有功能都到软件(计算机、服务器、显卡、CUDA)上去实现,脱离了雷达信号处理芯片,雷达射频前端仅仅是为了采集雷达原始数据,可以采用不同的射频前端,这样就不依靠硬件了。
审核编辑:汤梓红
-
射频
+关注
关注
105文章
5639浏览量
168499 -
SDR
+关注
关注
7文章
234浏览量
50655 -
毫米波
+关注
关注
21文章
1936浏览量
65148 -
雷达传感器
+关注
关注
3文章
293浏览量
34599
发布评论请先 登录
相关推荐
软件无线电(SDR)平台带你从频谱共享到5G研发
软件化雷达在并行信号处理系统上的实现Implementati
基于Linux的软件化和网络化雷达终端系统的实现
软件化和网络化的基于Linux的雷达终端系统
如何使用SDR设计宽带雷达发射机的论文说明







 工商网监
工商网监
评论