 波特图稳定性判据为何存在严重的使用局限?
波特图稳定性判据为何存在严重的使用局限?
增益裕量GM>0,相位裕量PM>0
为何存在严重的使用局限,甚至直接失效。
典型奈奎斯特图→波特图稳定裕量
为了便于观察波特图的稳定裕量,以常见的:
- 0型(分母不含s),ω从0°出发(Re正轴),回到-270°(Im正轴)
- 1型(分母含s的一次方),ω从-90°出发(Im负轴),回到-270°(Im正轴)
- 2型(分母含s的二次方),ω从-180°出发(Re负轴),回到-270°(Im正轴)
系统为例,把三个系统的穿越频率ωc放在重合的位置,给出如下图示。
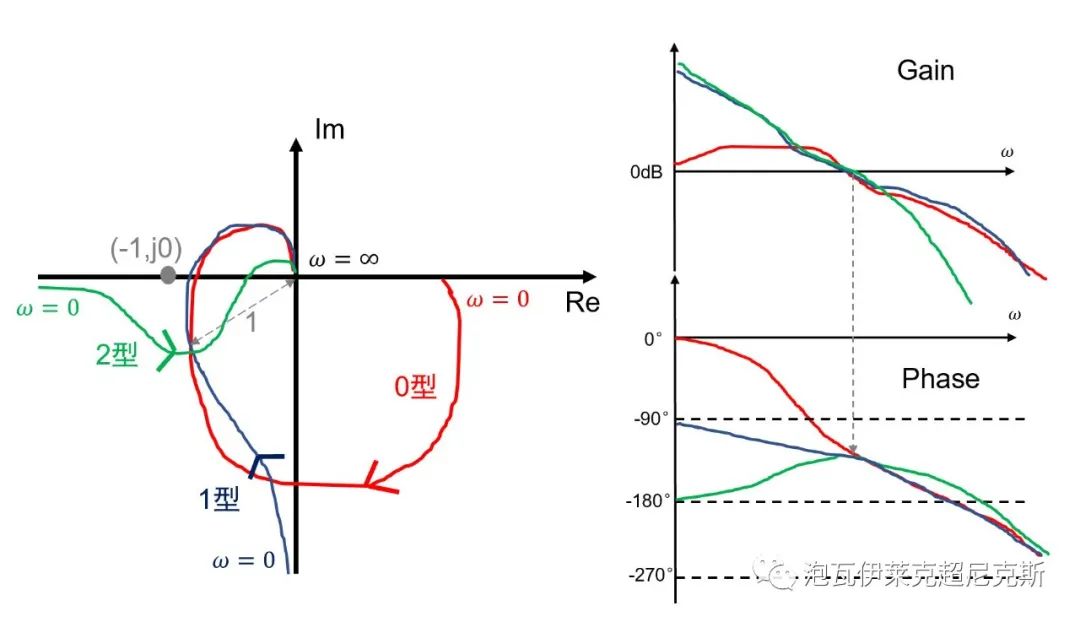
由图,三者的相位裕量PM≈45°相同,增益裕量GM则是绿色的2型系统大,红色0型和蓝色1型系统小。
- 结论:
典型形状的奈奎斯特图,对应到波特图时,稳定裕量GM/PM的物理意义是非常明确的,便于稳定裕量的定义,和稳定性判据的使用。
非典型系统→增益裕量无穷大
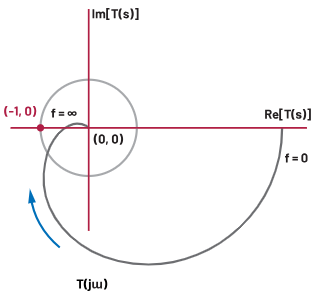
考察开环传递函数
G=s/(1+s)
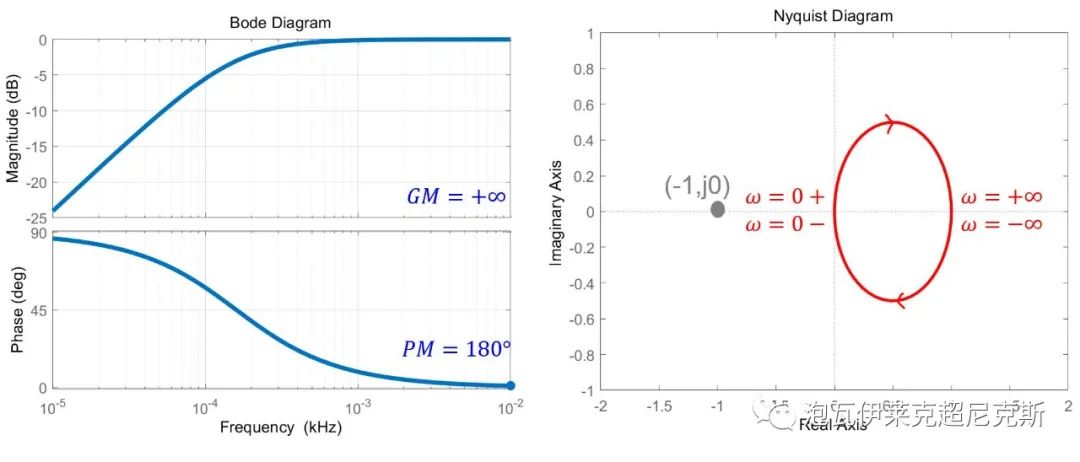
奈奎斯特图的增益无论如何增大,奈奎斯特图也不会包围(-1,j0),故有GM=+∞;奈奎斯特图与Re正轴交点是(1,j0),故有PM=180°。
再看波特图,与奈奎斯特图相对应,我们找不到幅频曲线与0dB交点,也找不到相频曲线与-180°交点。只能认为,频率无穷大处幅频与0dB相交,此时可以推出PM=180°;而相频永远不与-180°相交,所以GM=+∞。
考察开环传递函数
G=1/(s s (s+1))
这种系统是2型系统中的“结构不稳定”系统:若其分子增益和分母中一阶子系统的时间常数可调,无论如何调参,其闭环以后均不能稳定。

由奈奎斯特图可知,Z=N+P=1+0=1,闭环系统不稳定,且可以看出相位裕量PM为负,GM的话只有=-∞才有可能让极坐标图穿越(-1,0)。
再看波特图,PM为负是明确的;同时相频在频率为0处与-180°相交,故GM=-∞。
- 结论:
当相频不与-180°明显相交,仅从波特图观察稳定裕量GM并不十分直观。
局限1→幅频多次穿越0dB
考察开环传递函数
G=2*(s+0.05) (s+0.1)/(s (s+1)*(s+0.5))

波特图的幅频曲线,多次穿越0dB,给相位裕量PM的认定造成困扰。
由奈奎斯特图可知,Z=N+P=0+0=0,闭环系统稳定,增益裕量GM=+∞。
系统在频率1,频率2,频率3处依次穿越0dB线,当曲线顺时针旋转到频率1的位置与(-1,j0)相交后,系统已经开始不稳定。因此,相位裕量PM由频率1处(最小的穿越频率)的相角决定。
然而,倘若奈奎斯特曲线如下,当曲线顺时针旋转到频率3的位置与(-1,j0)相交后,系统已经开始不稳定。因此,相位裕量PM由频率3处(最大的穿越频率)的相角决定。
- 结论:
幅频多次穿越0dB,相位裕量PM可能由最小或者最大穿越频率处决定,取决于奈奎斯特图的具体形状。
局限2→相频多次穿越-180°
考察开环传递函数
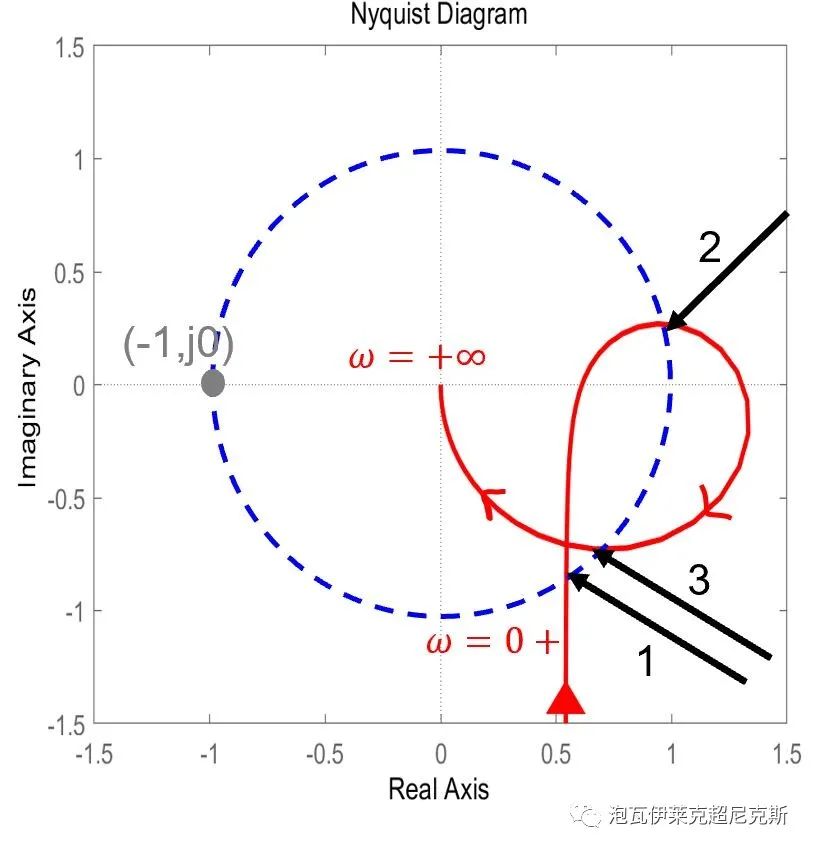
G=15*(s+5)(s+15)/((ss+s+1) (s+0.5) (0.01*s+1))
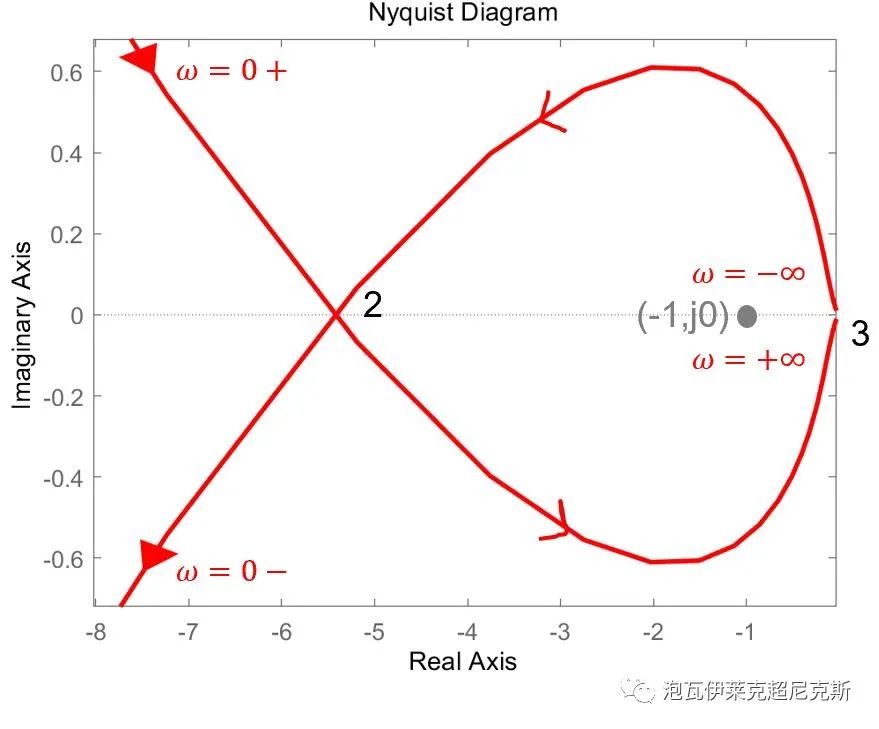
放大奈奎斯特图(-1,j0)附近穿越的细节,以观察频率2和频率3:
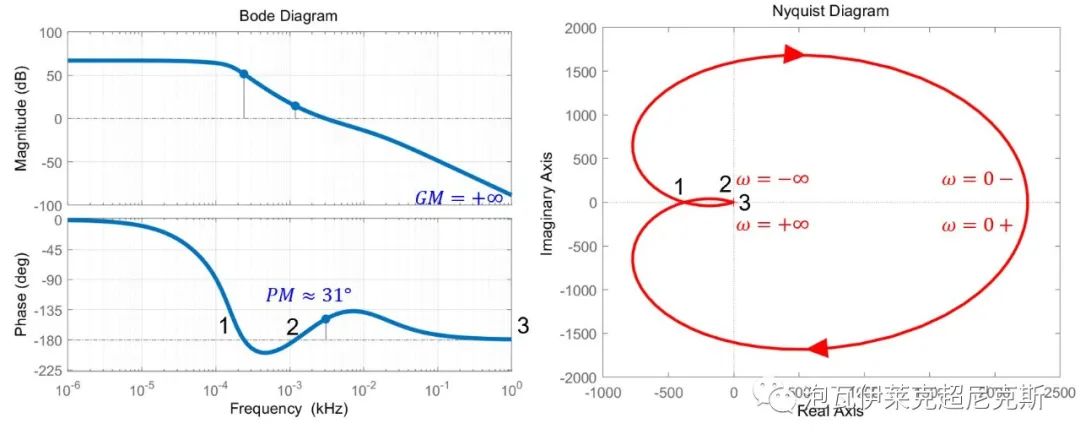
该例波特图中,相位裕度PM=31°是易见的,但相频曲线, 多次穿越-180°,给增益裕量GM的认定造成困扰 。
由该例的奈奎斯特图可知,Z=N+P=-1+1+0=0,闭环系统稳定,且应该得到增益裕量GM=+∞。
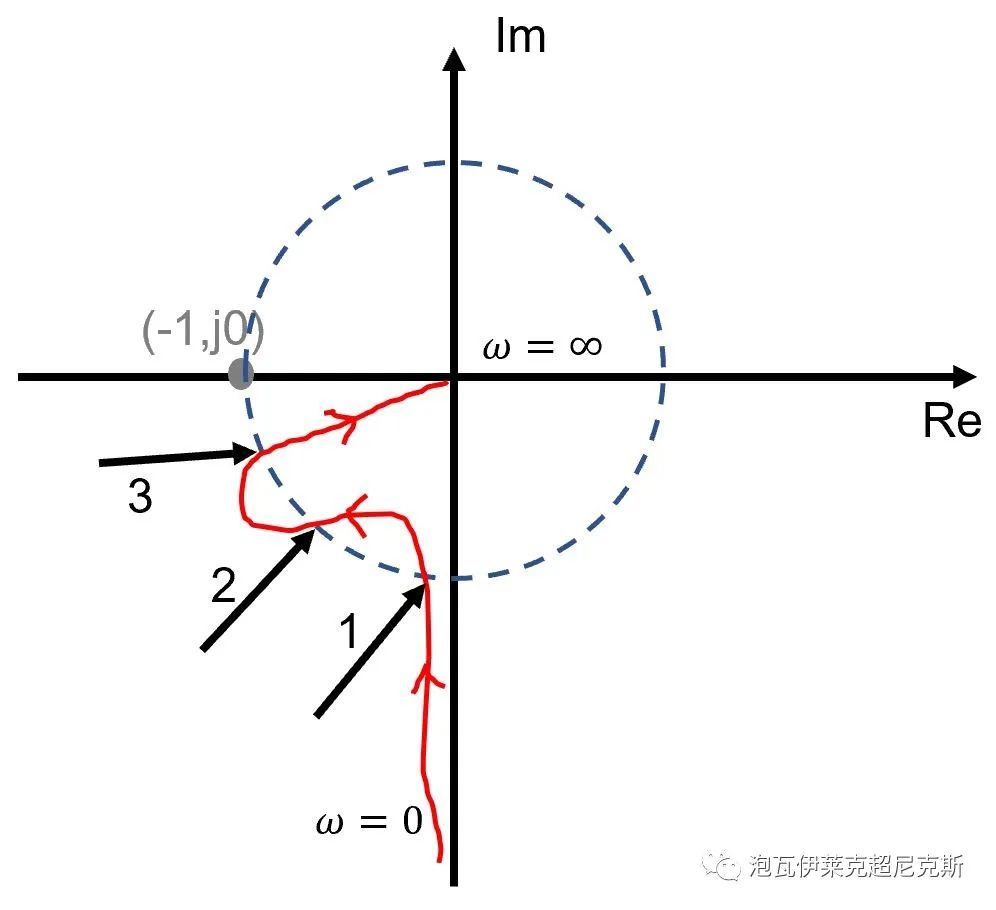
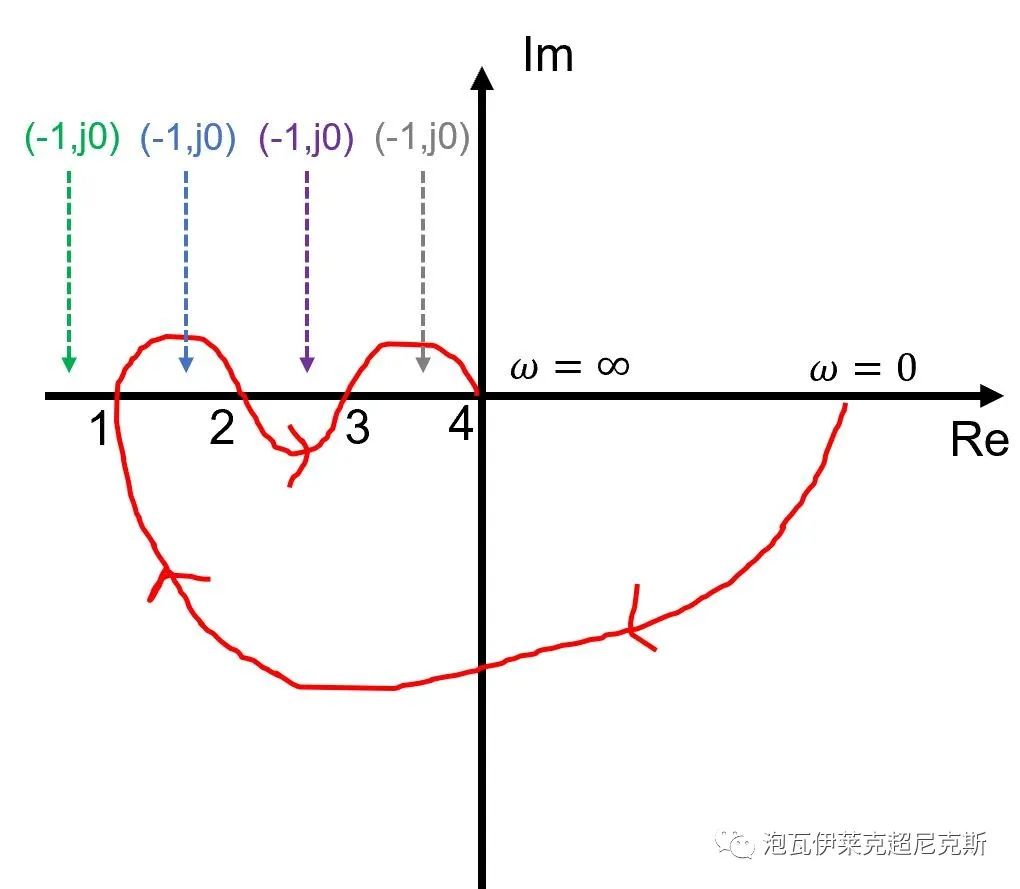
然而,上例只是特例,更普遍的,多次穿越-180°,形似该形状的奈奎斯特曲线可称作"条件稳定"系统。如下,(-1,j0)可能位于如下箭头指向的四个区间(1左侧,1-2,2-3,3-4)。
若(-1,j0)在频率1左侧,则存在若干的不连续增益区间,使系统稳定。这样一来,增益裕量GM是无法定义的:不存在一个GM,使得系统增益超过它后就不稳定,因为一个更大的增益区间会使系统又重新稳定。
- 结论:
幅频多次穿越-180°,若是“条件稳定”系统,增益裕量GM无法定义,失去物理意义。
失效→增益裕量GM<0才稳定
考察开环传递函数(非最小相位)
G=5*(s+3)/(s*(s-1))

由波特图,**增益裕量GM=-14dB<0, **相位裕度PM=51.6°>0,根据判据,判为闭环不稳定系统吗?
再看奈奎斯特图,由于开环函数G含有一个右半平面不稳定极点,即P=1,那么Z=N+P=-1+1=0,闭环系统稳定!
- 结论:
存在开环不稳定的非最小相位系统,其波特图稳定裕量判据是:增益裕量GM<0,相位裕量PM>0。
总结
基于波特图的稳定裕量和稳定性判据,仅仅是针对典型系统的“工程性”简化方法。
奈奎斯特图才是判断系统绝对稳定性和相对稳定性的有效频域工具。
*注: 奈奎斯特稳定性判据在不同资料中形式不尽相同,本文采用的定义如下。
Z为闭环系统不稳定的极点个数,Z=0代表闭环系统稳定; P为开环函数不稳定极点数,N为完整正负频域的闭合奈奎斯特曲线包围(-1,j0)的带符号圈数总和,顺时针计为+,逆时针计为-。
-
奈奎斯特
+关注
关注
0文章
9浏览量
9255 -
增益天线
+关注
关注
0文章
13浏览量
7665 -
频率仪
+关注
关注
0文章
12浏览量
5442 -
次奈奎斯特采样
+关注
关注
0文章
3浏览量
5356
发布评论请先 登录
相关推荐
如何运用波特图的力量来确保电路稳定性
运放的稳定性仿真分析

环路增益的稳定性
模拟IC公司专家写的波特图详解,放大器稳定补偿
模拟IC公司专家写的波特图详解,放大器稳定补偿
系统开环判断闭环稳定性
判定系统稳定性的充分必要条件是什么?
浅析环路稳定性原理与DCDC Buck环路稳定性
TCP/RED模型的稳定性分析

弱电网条件下基于阻抗的稳定性判据重塑
直流微电网稳定性分析
独立电力系统静态稳定性分析
了解电源环路稳定性和环路补偿:基本概念和工具





 工商网监
工商网监
评论