 剑桥大学开发出具有触觉感应功能的新型水凝胶皮肤
剑桥大学开发出具有触觉感应功能的新型水凝胶皮肤

几十年来,机器人专家一直致力于研发在外观和功能上都能模仿人类的机器人。近期的技术进步为类人机器人带来了新的前景,例如使用改进的传感器和柔软的人造皮肤。
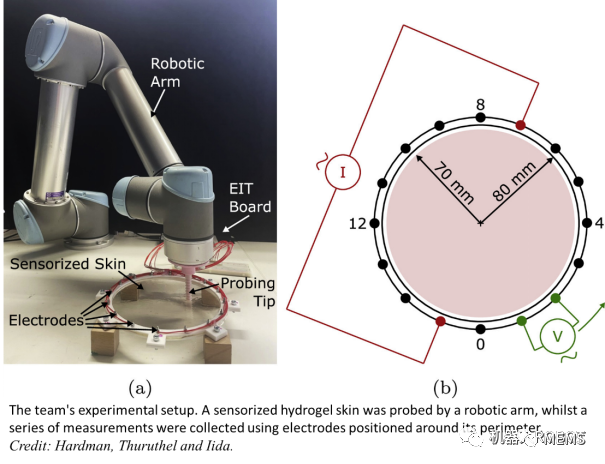
剑桥大学仿生机器人实验室的研究人员在此方面取得了重要进展,开发出一种基于水凝胶的皮肤,通过使用一系列基于电极的硬件系统和无模型计算方法重建触觉刺激,能够使机器人检测损伤、感知物体或人类的触摸,并监测其周围环境。
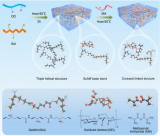
水凝胶是一种不溶于水但含有大量水分的凝胶,具有很好的柔韧性和生物相容性。研究人员利用专门开发的传感水凝胶作为皮肤的基础,将水凝胶材料与电阻抗断层扫描硬件相结合,该硬件使用安装在皮肤边缘的电极施加电流并测量电压,从而提供与皮肤状态有关的信息,推断人造皮肤被触摸的位置,以及是否有受损。
与传统的基于神经网络的人造皮肤系统不同,这种水凝胶皮肤不需要复杂的计算模型来分析电极数据,而是使用少量真实数据的简化方法为基于水凝胶的系统生成变形图。在初步评估中,研究人员发现基于水凝胶的系统明显优于基于传统神经网络的人造皮肤系统,在170毫米的圆形皮肤上实现了12.1毫米的平均分辨率。
目前为止,研究团队对这种新型水凝胶皮肤进行了三项实际应用测试,即损伤检测、环境监测和触觉刺激识别。该系统在所有三个应用中都表现良好,表明它有潜力提高应用于各种任务的软体机器人系统的能力。
研究团队表示,他们目前正在改进皮肤的形状和尺寸,使其能够感知更复杂的刺激。例如,将皮肤应用到机械手上,使它不仅能感知皮肤被触摸的位置和力度,还能感知机械手每个手指的位置以及手是否受损。
-
机器人
+关注
关注
211文章
28445浏览量
207202 -
电极
+关注
关注
5文章
819浏览量
27231
原文标题:剑桥大学开发出具有触觉感应功能的新型水凝胶皮肤
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
南京大学:研发水凝胶传感器动态保水新策略

吉林大学:研究具有3D力检测功能的自供电柔性电子皮肤触觉传感器
触觉传感重磅《Nature》!无线、低功耗、多刺激模式触觉电子皮肤(附原论文)
我国科学家研制出具有仿生三维架构的新型电子皮肤系统
水凝胶半导体材料问世,有望用于生物集成电路
密歇根州立大学:研发抗疲劳力致变色水凝胶新型触觉传感器

柔性电子技术革新与人形机器人的电子皮肤应用前景

清华大学研发新型仿生三维电子皮肤系统
具有密集交联结构的明胶基水凝胶电解质(ODGelMA)
一种可实现稳定压力传感的新型可拉伸电子皮肤
剑桥大学运用AI技术快速寻获帕金森病治疗之道

基于颜色变化水凝胶的集成微流控压力传感

接近传感电子皮肤研究进展综述





 工商网监
工商网监
评论