 控制周期或者控制频率和控制效果有何关系?
控制周期或者控制频率和控制效果有何关系?
控制周期或者控制频率和控制效果的关系,是不是成正比,这个问题没有深入地验证过,很难给出准确答案。但是我可以给出一个相关的结论,这个结论就是:控制频率越高,能保证控制效果的下限,肯定不会很差。
控制效果和控制频率,在实践中的认知,不一定具备线性的关系。以变频器为例,ABB的DTC采用的是变开关频率控制,其开关频率是不停变化的,说明开关频率和控制效果没有绝对的相关,当然前提是基于ABB的控制方法。
再以国产技术领先的汇川为例,一般默认开关频率是2~4kHz,最大16kHz。默认开关频率4k依然能实现较好的控制效果,而且低速为了规避逆变器非线性因素的影响,大多数主流厂家都会选择主动降低开关频率。
回到主题,为什么控制频率越高,能保证控制效果的下限呢?首先,我的从业经验让我习惯把目前的电机控制分成高压应用和低压电池应用。
高压应用一般是220VAC以上的应用,一般单相或者三相交流输入,是AC-DC-AC的传统电力电子拓扑,或者类似电动汽车的350VDC电池供电。这类控制器基本采用IGBT作为逆变器件,因为IGBT不能做太高的开关频率,所以高压控制器的开关频率一般不超过16k,而且超过了10k一般要根据负载降额运行。
低压电池应用主要指144VDC以下的应用,常见的包括12VDC,18VDC,24VDC,48VDC,72VDC,96VDC,108VDC和144VDC。具体的产品包括电动工具,无人机,压缩机,AGV,低压电动汽车控制器。
这类控制器的开关器件基本都是MOSFET,因为MOSFET开关速度快,相比IGBT开关损耗小很多,可以做到高达100kHz的开关频率。所以低压控制器,开关频率常见的都可以做到20kHz甚至30kHz。
而且由于低压电机同步速比较高,比如吸尘器基本是1对极,做到10万rpm,那么同步电频率是1700Hz,必须提高开关频率。航模电机一般同步电频率是1200Hz左右。
同样以1200Hz为例,10kHz开关频率,每个开关周期离散造成的角度滞后是1200360°/10k=43.2°,20k开关频率,每个开关周期离散造成的角度滞后是1200360°/20k=21.6°。
因为PWM生效有一个开关周期的延时,再比如三角波计数器底点生效,在这整个周期生效,以顶点作为平均值,那么其实离散造成的延时是1.5个开关周期。
所以对于1200Hz电机,10kHz的离散延时是64.8°,20kHz的离散延时是32.4°。所以提高开关频率,可以一定程度上掩盖离散造成的角度延时,提高控制效果的下限。所以很多工程师,哪怕是400Hz同步频率的电机,依然会选择高达16kHz的控制频率,这样子参数好调,系统容易稳定,控制效果有保证。
以上分析是基于单采单更的模式,现在单电阻采样无法实现双采双更,使用M0芯片受限于计算资源,也是单采单更为主。按照同行的共识,100Hz的电频率对应1kHz的控制频率,即1000Hz的电频率能用10kHz控制频率,单采单更能实现稳定控制已经是很不错的效果了。所以说, 越低的开关频率,能实现不错的控制效果,更显得难能可贵 。
下面贴几张自己用M0芯片实现的低开关频率控制效果图。
16kHz开关频率,实现1800Hz同步速吸尘器单电阻无感FOC控制:
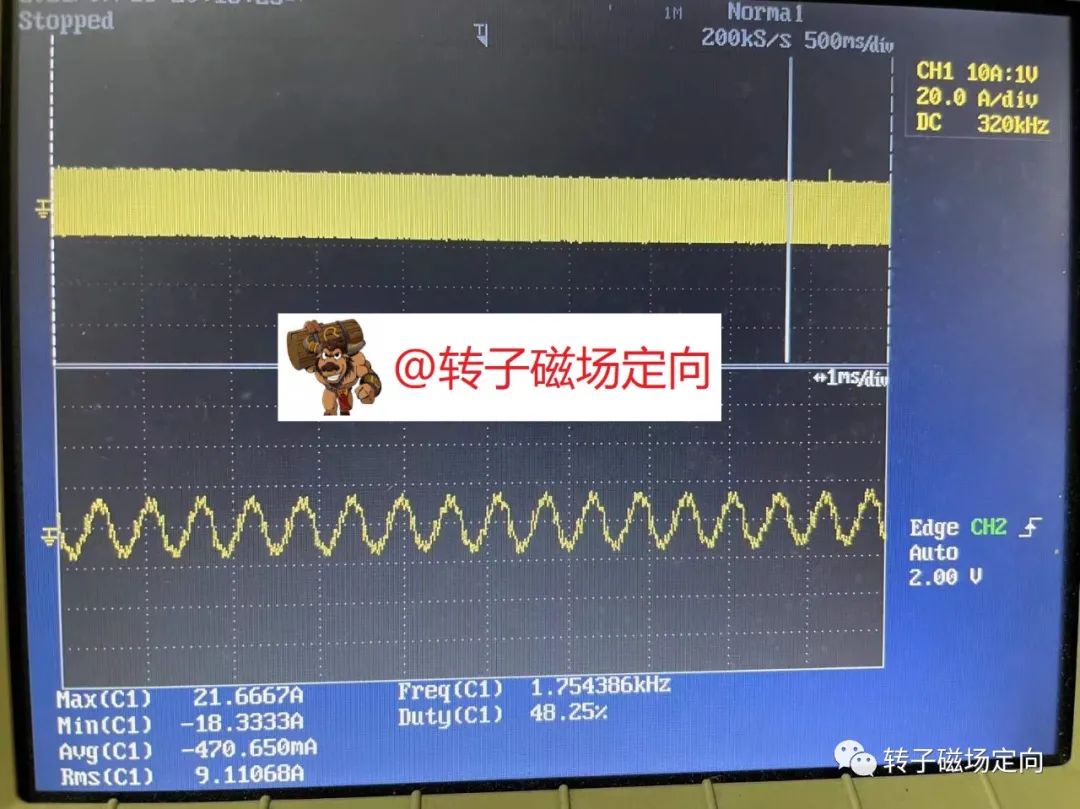
10kHz开关频率实现1000Hz同步速航模电机无感FOC控制:

8k开关频率实现800Hz无感FOC满载控制:

-
电动汽车
+关注
关注
156文章
12110浏览量
231509 -
逆变器
+关注
关注
285文章
4729浏览量
207062 -
IGBT
+关注
关注
1267文章
3800浏览量
249249 -
电池供电
+关注
关注
0文章
255浏览量
22178 -
高压控制器
+关注
关注
0文章
7浏览量
4617
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论