 控制环设计方法及稳定性评价
控制环设计方法及稳定性评价
经典控制理论的特点是以输入输出特性(主要是传递函数)为系统数学模型,采用频率响应法和根轨迹法这些图解分析方法,分析系统性能和设计控制装置。在实际操作中,确定控制参数也就是这两个步骤,一是确定系统的开环传递函数,二是整定传递函数,得到控制参数。
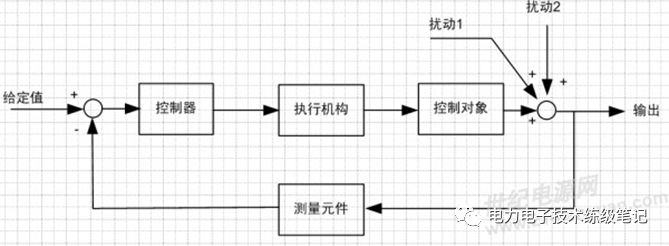
典型的反馈控制系统的框图
在反馈控制系统中,控制器对被控对象施加的控制作用是取自被控量(即输出量)的反馈信息,用来不断地修正被控量与给定值之间的偏差,从而实现对被控对象进行控制任务,这就是反馈控制的原理。
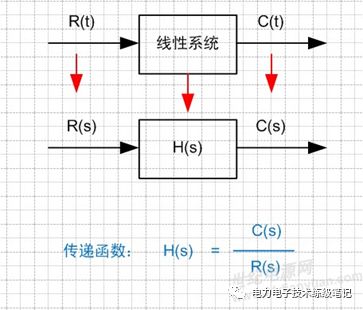
传递函数是在频域里面研究系统特性。频域里面,只需要幅值、频率和相位三个信息就能完全确定一个正弦信号。闭环传递函数比较复杂,特点不鲜明,同时所有的控制都是负反馈,所以只要开环传递函数确定了,闭环传递函数的特性也唯一了。

低频增益就是频率接近0时(直流分量),幅频特性的纵坐标值,如下图的蓝色圈所示。这个值决定了闭环系统的稳态精度。对于低频增益,我们希望越大越好,最好是无穷大。大家所熟知的积分环节,低频增益就是无穷大,用于消除稳态误差的。

高频增益就是频率比较高的增益,如下图蓝框所示。这一段增益决定了系统抗干扰的能力。大家所熟知的干扰都含有高频成分。开环传递函数对高频的增益越低,衰减就越大,就不会对系统造成太大的扰动。所以我们希望高频段能快速降到0db一下,斜率越陡越好。

带宽就是开环幅频特性过0db所对应的频率Wc,也叫截止频率,如下图蓝框所示。截止频率越高,代表系统响应速度越快。截止频率以下,增益大于1,截止频率以上,增益小于1。也就是说,截止频率越高,系统能响应的信号频率也就越高,当然响应速度也就越快了。

相角裕度指的是在截止频率处,相频特性对应的相角和-180度之间的距离。相角裕度决定了系统的稳定性。该值越大,系统越稳定。-180度是不稳定的点,这是因为-180度就相当于反向,乘以了-1,就把本身的负反馈变成了正反馈,系统就失稳了。或者可以这么理解闭环传递函数为G/(1+G),可能使分母为零的点是不稳定点,G=-1,必须同时满足两个条件:开环传递函数的相位为-180°,同时|G|=1。
上面讲的都是用波特图分析系统稳定性的一些基本概念。大家可能更关心的是知道了开环传递函数后怎么计算PI参数?这个有很多种办法,下面介绍按照I型或者II型系统整定方法,需要指出的是,这只是工程中估计PI参数的一种,并非唯一方法。

首先说一下n型系统概念。对于开环传递函数,分母中有r个s,就是r型系统。0型系统,分母中没有s,低频增益是一个有限值,会有稳态误差。3型及以上系统很难稳定,因为分母的一个s就是90度响应,多个s相角裕度很快就没有了。所以常用的就是I型和II型系统。


典型I型系统
I型系统结构简单,1+Ts为系统本身的一阶惯性环节,只需要确定K值即可。该系统的缺点是,对斜坡和加速输入跟踪性能差。从bode图上看,I型系统低频增益无穷大,没有稳态误差。高频以-40db斜率衰减,抗干扰能力强。截止频率越高,相角裕度越小;截止频率越低,相角裕度越大。
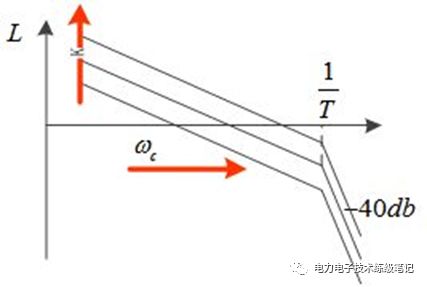
随着K增大,截止频率增大,增加了快速性;但降低了相角裕度和抗扰性。在配置中,通常取KT=0.5,来权衡快速性和稳定性。


典型II型系统
II型系统需要确定分子的两个参数K和τ,分母的1+Ts为系统的一阶惯性环节。II型系统对斜坡和加速输入能无静差跟踪。是电力电子控制中最常用的。K和τ有众多种组合,怎么来合理的确定它们呢?前人们针对II型系统有个中频带宽的概念,

确定了中频宽h,就确定了τ,再改变K使得幅频特性上下平移,改变ωc。
学者们发现,对于确定的h,存在一个确定的K,使得闭环幅频特性峰值最小。K和h的关系为:

所以我们的工作就剩下,选择合适的h就可以了。不同的h有什么影响呢?如下图所示,h越小,阶跃响应越快,但震荡越多,超调越大;h越大,阶跃响应越慢,但震荡越小,超调越小。大家可以根据自己的需要,选择不同的h来配置II型系统。

-
控制器
+关注
关注
112文章
16339浏览量
177859 -
正弦波
+关注
关注
11文章
642浏览量
55348 -
反馈控制系统
+关注
关注
0文章
12浏览量
2518
发布评论请先 登录
相关推荐
【转帖】电源环路稳定性评价指标和评价方法
怎么区分电动汽车操纵稳定性好坏?
电源环路稳定性评价方法
数字锁相环提高锁相稳定性的方法
提高数字锁相环锁相稳定性的方法
3个方法评价电源环路稳定性
怎样去调试电源控制环稳定性呢
基于LabVIEW的车辆稳定性控制硬件在环系统

什么是电动汽车的操纵稳定性_如何评价电动汽车的操纵稳定性的好坏
电源控制环稳定性基础理论与调试方法






 工商网监
工商网监
评论