 学会面向对象编程封装IMU驱动
学会面向对象编程封装IMU驱动
上一节我们成功读取到了IMU的数据,其中角度用欧拉角的方式表示的,在我们机器人世界里姿态的表示往往使用四元数表示(如果不清楚他们之间的关系可以回看第六章机器人学篇),所以我们需要将欧拉角转换成四元数。除此之外我们还需要将其坐标系矫正到右手坐标系。
所以本节我们将通过面向对象的方式将IMU驱动进行封装,并为其添加坐标系转换以及四元数转换函数。
本教程所使用硬件平台为MicroROS学习板V1.0.0,可点击阅读原文购买及查看详情

一、理论介绍
1.1.欧拉角转四元数
欧拉角转四元数的公式我们在第六章入门篇第三节有介绍,这里回顾一下
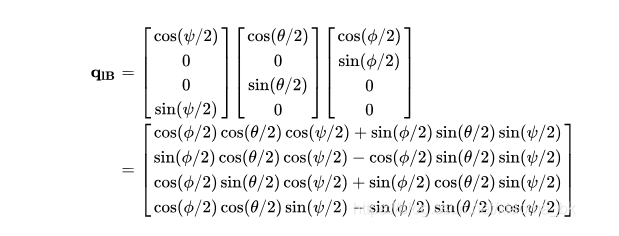
根据公式我们可以写出代码
typedef struct
{
float w;
float x;
float y;
float z;
} quaternion_t;
Euler2Quaternion(float roll, float pitch, float yaw, quaternion_t &q)
{
double cr = cos(roll * 0.5);
double sr = sin(roll * 0.5);
double cy = cos(yaw * 0.5);
double sy = sin(yaw * 0.5);
double cp = cos(pitch * 0.5);
double sp = sin(pitch * 0.5);
q.w = cy * cp * cr + sy * sp * sr;
q.x = cy * cp * sr - sy * sp * cr;
q.y = sy * cp * sr + cy * sp * cr;
q.z = sy * cp * cr - cy * sp * sr;
}
1.2 坐标系校准
我们采用右手坐标系,接着我们依次来校准角度数据的方向。
打开终端,点击RST,查看IMU数据。
首先是X轴,我们让开发板上爱神丘比特的剑头指向自己,然后从右侧往左侧倾斜。
可以看到此时X轴为正值,符合右手坐标系法则。
接着是Y轴,平放,将箭头朝向自己的胸口,接着抬高板子,让箭头指向自己的头部,观察Y轴的变化。
Y轴为负值,不符合右手坐标系法则,所以Y的值应该取一次负,使其为正。
接着是Z轴,平放,将箭头朝向自己的胸口,然后逆时针旋转板子,观察数值变化。
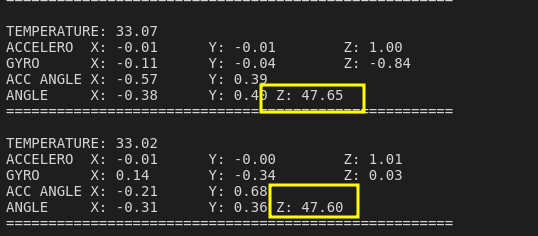
值为正,表示符合右手坐标系法则。
你可能会问小鱼怎么确认怎样旋转是正,怎样旋转是负,首先要确认轴向,我们开发板的Z轴朝上,X轴朝前,此时Y轴应该朝左。接着摊开右手手掌,用大拇指朝向轴的方向,比如朝向X轴,然后握起手掌,那么你握的方向就是正方向。
二、开始写代码
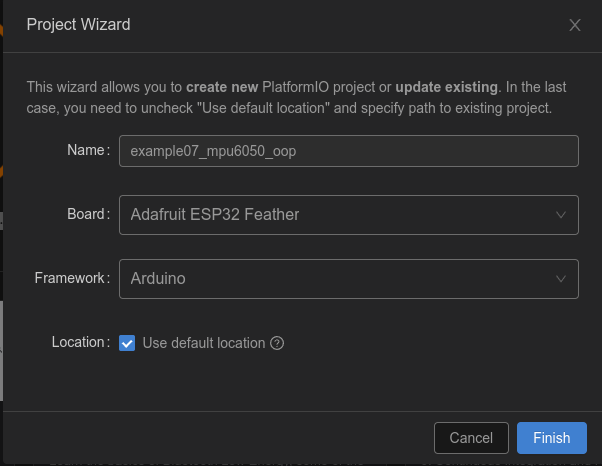
新建工程example07_mpu6050_oop
接着为其添加依赖
修改platformio.ini
[env:featheresp32]
platform = espressif32
board = featheresp32
framework = arduino
lib_deps =
https://ghproxy.com/https://github.com/rfetick/MPU6050_light.git
接着在lib下新建IMU文件夹,并在文件夹下新建IMU.h和IMU.cpp
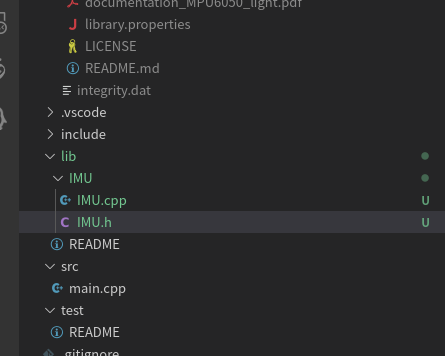
IMU.h
#ifndef __IMU_H__
#define __IMU_H__
#include "Wire.h"
#include "MPU6050_light.h"
typedef struct
{
float w;
float x;
float y;
float z;
} quaternion_t; // 四元数结构体
typedef struct
{
float x;
float y;
float z;
} vector_3d_t; // 通用3D点结构体
typedef struct
{
quaternion_t orientation;
vector_3d_t angle_euler;
vector_3d_t angular_velocity;
vector_3d_t linear_acceleration;
} imu_t; // IMU数据结构体
class IMU
{
private:
MPU6050 *mpu_; // mpu6050指针
public:
/**
* @brief 同u哦NPU6050构造一个新的IMU对象
*
* @param mpu
*/
IMU(MPU6050 &mpu);
~IMU() = default;
/**
* @brief 初始化函数
*
* @param sda 引脚编号
* @param scl 引脚编号
* @return true
* @return false
*/
bool begin(int sda, int scl);
/**
* @brief 欧拉角转四元数
*
* @param roll 输入X
* @param pitch 输入y
* @param yaw 输入Z
* @param q 返回的四元数引用
*/
static void Euler2Quaternion(float roll, float pitch, float yaw, quaternion_t &q);
/**
* @brief 获取IMU数据函数
*
* @param imu
*/
void getImuData(imu_t &imu);
/**
* @brief 更新IMU数据,同上一节中的mou.update
*
*/
void update();
};
#endif // __IMU_H__
IMU.cpp
#include "IMU.h"
IMU::IMU(MPU6050 &mpu)
{
mpu_ = &mpu;
};
bool IMU::begin(int sda, int scl)
{
Wire.begin(sda, scl);
byte status = mpu_- >begin();
Serial.print(F("MPU6050 status: "));
Serial.println(status);
if (status != 0)
{
return false;
} // stop everything if could not connect to MPU6050
Serial.println(F("Calculating offsets, do not move MPU6050"));
delay(1000);
// mpu.upsideDownMounting = true; // uncomment this line if the MPU6050 is mounted upside-down
mpu_- >calcOffsets(); // gyro and accelero
Serial.println("Done!n");
return true;
}
void IMU::Euler2Quaternion(float roll, float pitch, float yaw, quaternion_t &q)
{
double cr = cos(roll * 0.5);
double sr = sin(roll * 0.5);
double cy = cos(yaw * 0.5);
double sy = sin(yaw * 0.5);
double cp = cos(pitch * 0.5);
double sp = sin(pitch * 0.5);
q.w = cy * cp * cr + sy * sp * sr;
q.x = cy * cp * sr - sy * sp * cr;
q.y = sy * cp * sr + cy * sp * cr;
q.z = sy * cp * cr - cy * sp * sr;
}
void IMU::getImuData(imu_t &imu)
{
imu.angle_euler.x = mpu_- >getAngleX();
imu.angle_euler.y = -mpu_- >getAngleY();
imu.angle_euler.z = mpu_- >getAngleZ();
imu.angular_velocity.x = mpu_- >getAccAngleX();
imu.angular_velocity.y = -mpu_- >getAccAngleY();
imu.angular_velocity.z = mpu_- >getGyroZ();
imu.linear_acceleration.x = mpu_- >getAccX();
imu.linear_acceleration.y = mpu_- >getAccY();
imu.linear_acceleration.z = mpu_- >getAccZ();
IMU::Euler2Quaternion(imu.angle_euler.x, imu.angle_euler.y, imu.angle_euler.z,
imu.orientation);
}
void IMU::update()
{
mpu_- >update();
}
main.cpp
#include < Arduino.h >
#include "IMU.h"
MPU6050 mpu(Wire); // 初始化MPU6050对象
IMU imu(mpu); // 初始化IMU对象
imu_t imu_data;
unsigned long timer = 0;
void setup()
{
Serial.begin(115200);
imu.begin(18, 19); // 初始化IMU,使用18,19引脚
}
void loop()
{
imu.update();
if ((millis() - timer) > 100)
{
imu.getImuData(imu_data); // 获取IMU数据结构体
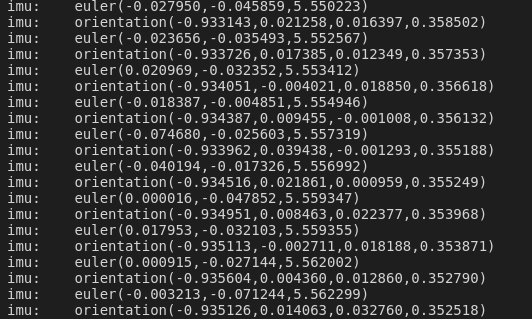
Serial.printf("imu:teuler(%f,%f,%f)n",
imu_data.angle_euler.x, imu_data.angle_euler.y, imu_data.angle_euler.z);
Serial.printf("imu:torientation(%f,%f,%f,%f)n",
imu_data.orientation.w, imu_data.orientation.x, imu_data.orientation.y, imu_data.orientation.z);
timer = millis();
}
}
对于代码的解释已经放到了注释之中。
编译下载后,你将看到
三、总结
本节我们通过对MPU6050驱动的封装,学习了如何在嵌入式上使用面向对象编程的方法,下一节我们继续尝试使用开源库来驱动OLED模块,让我们的显示器亮起来。
-
嵌入式
+关注
关注
5103文章
19268浏览量
310022 -
封装
+关注
关注
127文章
8142浏览量
143852 -
面向对象
+关注
关注
0文章
64浏览量
10030 -
学习板
+关注
关注
0文章
46浏览量
12250 -
IMU
+关注
关注
6文章
329浏览量
46088
发布评论请先 登录
相关推荐

如何在嵌入式上使用面向对象编程呢?
plc面向对象编程架构与实现






 工商网监
工商网监
评论