 使用第三方开源库驱动OLED模块
使用第三方开源库驱动OLED模块
你好,我是爱吃鱼香ROS的小鱼。本节我们继续尝试使用开源库,驱动OLED模块,最后的效果实现在OLED上显示当前的角度信息。
本教程所使用硬件平台为MicroROS学习板V1.0.0,可点击阅读原文购买及查看详情

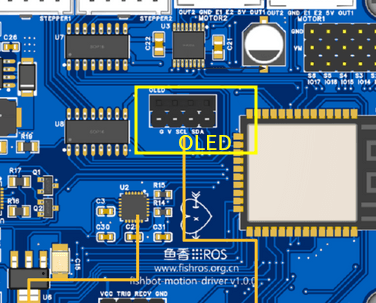
我们MicroROS开发板上的OLED位置如图所示。
一、OLED模块介绍
我们的OLDE模块样子如上图所示,整个屏幕有128*64个像素点,我们可以实现对每一个像素点的亮灭控制,以此实现对屏幕显示内容的控制。注意我们并不能控制屏幕上像素的颜色,所以我们OLED一般是单色的。
那我们如何控制它的亮灭呢,可以看到在OLED的上方一共有四个引脚,从左到右依次是GND、VCC、SCL、SDA,其中GND、VCC是用于OLED的供电使用,SCL和SDA是I2C通信使用。
听到I2C通信是不是觉得很熟悉,毕竟上一节驱动MPU6050时我们就是使用的I2C协议(Wrie),别着急,我们先用着,下一节我们再详细介绍I2C通信。
二、新建工程并安装依赖
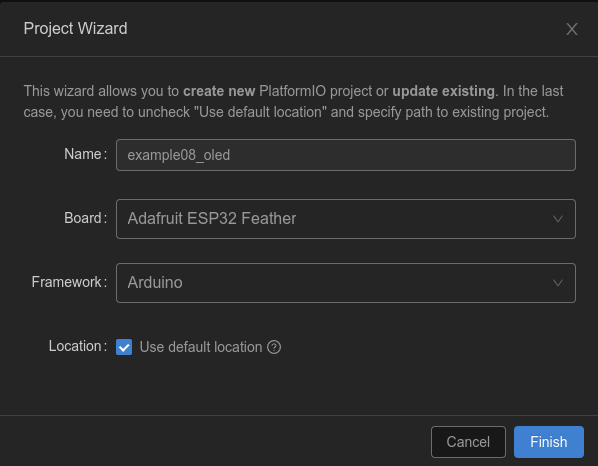
安装依赖,可以直接修改>platformio.ini
[env:featheresp32]
platform = espressif32
board = featheresp32
framework = arduino
lib_deps =
https://ghproxy.com/https://github.com/rfetick/MPU6050_light.git
adafruit/Adafruit SSD1306@^2.5.7
接着打开IMU的源码目录,将pio/libdeps/featheresp32/MPU6050_light/examples/GetAngle/GetAngle.ino文件内容复制到main.cpp中,接着修改波特率和I2C地址。
#include "Wire.h"
#include < MPU6050_light.h >
MPU6050 mpu(Wire);
unsigned long timer = 0;
void setup()
{
Serial.begin(115200);
Wire.begin(18, 19);
byte status = mpu.begin();
Serial.print(F("MPU6050 status: "));
Serial.println(status);
while (status != 0)
{
} // stop everything if could not connect to MPU6050
Serial.println(F("Calculating offsets, do not move MPU6050"));
delay(1000);
// mpu.upsideDownMounting = true; // uncomment this line if the MPU6050 is mounted upside-down
mpu.calcOffsets(); // gyro and accelero
Serial.println("Done!n");
}
void loop()
{
mpu.update();
if ((millis() - timer) > 10)
{ // print data every 10ms
Serial.print("X : ");
Serial.print(mpu.getAngleX());
Serial.print("tY : ");
Serial.print(mpu.getAngleY());
Serial.print("tZ : ");
Serial.println(mpu.getAngleZ());
timer = millis();
}
}
三、使用Adafruit库驱动OLED
该库提供的驱动例程较为复杂,小鱼这里提供一个简易版本。
#include "Wire.h"
#include < Adafruit_GFX.h > // 加载Adafruit_GFX库
#include < Adafruit_SSD1306.h > // 加载Adafruit_SSD1306库
Adafruit_SSD1306 display; // 声明对象
void setup()
{
Wire.begin(18, 19);
display = Adafruit_SSD1306(128, 64, &Wire);
display.begin(SSD1306_SWITCHCAPVCC, 0x3C); // 设置OLED的I2C地址,默认0x3C
display.clearDisplay(); // 清空屏幕
display.setTextSize(2); // 设置字体大小,最小为1
display.setCursor(0, 0); // 设置开始显示文字的坐标
display.setTextColor(SSD1306_WHITE); // 设置字体颜色
display.println("hello oled!"); // 输出的字符
}
void loop()
{
}
根据上面的简易版本,修改原有的IMU代码,最后得到如下代码
/* Get tilt angles on X and Y, and rotation angle on Z
* Angles are given in degrees
*
* License: MIT
*/
#include "Wire.h"
#include < MPU6050_light.h >
#include < Adafruit_GFX.h > // 加载Adafruit_GFX库
#include < Adafruit_SSD1306.h > // 加载Adafruit_SSD1306库
Adafruit_SSD1306 display;
MPU6050 mpu(Wire);
unsigned long timer = 0;
void setup()
{
Serial.begin(115200);
Wire.begin(18, 19);
/*========================OLED初始化====================================*/
display = Adafruit_SSD1306(128, 64, &Wire);
display.begin(SSD1306_SWITCHCAPVCC, 0x3C); // 设置OLED的I2C地址
display.clearDisplay(); // 清空屏幕
display.setTextSize(2); // 设置字体大小
display.setCursor(0, 0); // 设置开始显示文字的坐标
display.setTextColor(SSD1306_WHITE); // 设置字体颜色
display.println("hello oled!"); // 输出的字符
display.display();
/*========================IMU初始化====================================*/
byte status = mpu.begin();
Serial.print(F("MPU6050 status: "));
Serial.println(status);
while (status != 0)
{
} // stop everything if could not connect to MPU6050
Serial.println(F("Calculating offsets, do not move MPU6050"));
delay(1000);
// mpu.upsideDownMounting = true; // uncomment this line if the MPU6050 is mounted upside-down
mpu.calcOffsets(); // gyro and accelero
Serial.println("Done!n");
}
void loop()
{
mpu.update();
if ((millis() - timer) > 100)
{ // print data every 100ms
Serial.print("X : ");
Serial.print(mpu.getAngleX());
Serial.print("tY : ");
Serial.print(mpu.getAngleY());
Serial.print("tZ : ");
Serial.println(mpu.getAngleZ());
timer = millis();
/*==========================OLED显示===========================*/
display.clearDisplay(); // 清空屏幕
display.setCursor(0, 0); // 设置开始显示文字的坐标
display.print("X="); // 输出X
display.println(mpu.getAngleX());
display.print("Y="); // 输出Y
display.println(mpu.getAngleY());
display.print("Z="); // 输出Z
display.println(mpu.getAngleZ());
display.display();
}
}
四、下载测试
接上OLED,将代码编译下载到开发板上,观察OLED的显示。
五、总结
本节依然是很轻松的完成了OLED驱动,但你应该有个疑问,为什么OLED和MPU6050代码里都有这么一句Wire.begin(18, 19);,为什么都是18和19,不能是其他的数值吗?带着疑惑,下一节小鱼带你一起探秘I2C通信以及原理图。
-
模块
+关注
关注
7文章
2747浏览量
47951 -
OLED
+关注
关注
119文章
6224浏览量
225231 -
I2C
+关注
关注
28文章
1496浏览量
125036 -
学习板
+关注
关注
0文章
46浏览量
12224 -
ROS
+关注
关注
1文章
281浏览量
17180
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论