 Banana Pi BPI-FSM1819D 峰岹科技伺服电机驱动控制器
Banana Pi BPI-FSM1819D 峰岹科技伺服电机驱动控制器
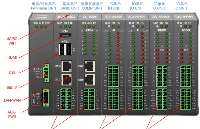
BPI-FSM8191D伺服电机控制器是香蕉派开源社区与峰岹科技合作打造的一款工业级伺服电机控制产品。是一款应用于驱动旋转伺服电机,直线伺服电机以及力矩电机的伺服模块,在实际应用中,由主控板与功率板组成,提供电机控制核心算法及各种通信功能。 BPI-FSM8191D伺服模块主控板,配置两个应用端口和一个功率板接口,伺服模块引脚包含了多个信号接口,能满足大多数伺服功能的调试使用。在不同的应用场景中,可定制伺服功率板,用于提供功率输入输出,电源供给以及能耗需求。功率板拥有丰满的调试接口,完全满足开发者不同功率,电源的需求。
应用场景
新能源行业:模切机、叠片机、切叠一体机、极耳焊接、包膜机、入壳机、顶盖焊、氦检机、注液机、化成柜、补液机、密封焊机、分容柜、Pack线等。
半导体行业:清洗设备、***、刻蚀机、修复检测设备、划片机、晶圆探针测试设备、分选机、贴片机、邦定机等设备
新型显示行业:固晶机、返修机、点胶机、贴合设备、邦定设备、背光组装设备、除泡设备、切割设备、AOI设备等基本全套工艺设备。
光学行业:焊线机、调焦机、摆盘机、组立机、成像检测等。
硬件规格
常见用模块做成的伺服控制器电气规格
| 伺服控制器电气规格 | |||
| 项目 | 规格 | ||
| 功率电路输入电源(L1,L2,L3) | 额定电压(VAC线-线)±10% | 240 | |
| 频率(Hz) | 50 | ||
| 240VAC | 单相/三相 | ||
| 控制电路输入电源(L1C,L2C) | 240±10VAC | 单相 | |
| 逻辑输入熔断器(延时) | 240VAC(A) | 0.5 | |
| STO(安全转矩切断) | STP电源(VDC) | 24±10% | |
| STO熔断器(延时) | 240VAC(A) | 1.5 | |
| 电机输出(U,V,W) | 连续输出电源(Arms) | 4.5 | |
| 连续输出电源(Apeak) | 6.63 | ||
| 2秒内峰值输出电流(Arms) | 14 | ||
| 2秒内峰值输出电流(Apeak) | 20 | ||
| PWM频率(kHz) | 16 | ||
| 软启动 | 最大浪涌电流(A) | 7 | |
| 最大充电时间(ms) | 250 | ||
| 跳闸电压 | 欠电压跳闸(额定)(VDC) | 50 | |
| 过电压跳闸(VDC) | 420 | ||
| 过温 | 功率板过温故障温度(温度稳定时)(℃) | 100±5% | |
| 再生制动 | 内部母线电容(uF) | ||
| VLOW(再生电路关闭)(VDC) | 380 (可设置) | ||
| VMAX(再生电路打开)(VDC) | 400 (可设置) |
伺服模块控制规格
| 接口选项:模拟电压/脉冲指令/RS232控制规格 | |||
| 项目 | 规格 | 说明 | |
| 电机 | 交流与直流 | 旋转伺服电机、直线伺服电机 | |
| 自动配置 | 自动配置电机相位及相线设置 | ||
| 运行模式 | 可选择的模式 | 转矩控制、速度控制、位置控制 | |
| 转矩控制 | 输入指令/输出指令 | 速度指令 / 电流指令 | |
| 性能 | 刷新频率62.5us (16kHz) | ||
| 阶跃响应时间 | |||
| 控制方法 | DQ, PI | ||
| 参考指令 | 模拟±10VDC,串行RS232 | ||
| 自动调整 | 手动调整电流环参数 | ||
| 速度控制 | 输入指令/输出指令 | 速度指令 / 电流指令 | |
| 性能 | 刷新频率 125 μs (8 kHz) | ||
| 可选速度控制方法 | PI | ||
| 滤波器 | 一阶低通滤波器、两个级联的一阶低通滤波器 | ||
| 参考指令 | 模拟±10 VDC, 串行RS232 或 USB | ||
| 位置控制 | 输入指令/输出指令 | 位置指令/速度指令 | |
| 性能 | 刷新频率250us(4kHz) | ||
| 控制方法 | PID及前馈 | ||
| 参考指令 | 带电子传动的脉冲&方向,串行,串行RS232 | ||
| 状态显示 | 形式 | 7 段 LED (红色), 显示驱动器状态(报警、运行、使能等) | |
| 电子齿轮 | 方法 | 用户定义齿轮比 | |
| GUI | 用户界面 | 基于 Windows串口软件 | |
| 功能 | 设定连接、驱动器信息、电源信息、电机、反馈、I/O 选择/配置、运动设定/调整、故障历史/状态显示等。 | ||
| 旋转单位 | 位置 | 脉冲(Counts) | |
| 速度 | 转每分 (rpm) | ||
| 加速度/减速度 | rps/s | ||
| 直线单位 | 位置 | 脉冲(Counts)、毫米(mm) | |
| 速度 | 毫米/秒(mm/s) | ||
| 加速度/减速度 | 毫米/秒 2(mm/s2) |
伺服模块通信规格
| 通讯规格 | |||
| 项目 | 规格 | ||
| RS232 | 基于 modbus RTU | ||
| 波特率 19200 bit/s | |||
| 最大导线长度 10 m | |||
| 高速串口 (专门用于观测波形) | 基于 自定义协议 | ||
| 波特率 115200 - 750000 bit/s | |||
| 最大导线长度 2m |
伺服模块I/O规格
| 伺服模块I/O规格 | |||
| 项目 | 规范 | 说明 | |
| 模拟输入 | 电压范围 | 模拟 ±10 VDC 差分 | |
| 零衰减 | 100 Hz | ||
| 带宽 (-3 dB) | 500 Hz | ||
| 脉冲 & 方向 | 信号 | RS 422 线接收器 | |
| 最大输入频率 | 1.6 MHz (以后会加到5MHz) | ||
| 数字输入(8 路) | 信号 | 可配置、 光隔 、 漏极输入。 | |
| (通用IO可配置相关引脚功能) | 电压 | 24 V | |
| 最大输入电流 | 10 mA | ||
| 传送延时时间 | 1 ms | ||
| 数字输出(6 路) | 信号 | 可配置、 集电极开路、 光隔 、 漏极输出。 | |
| (通用IO可配置相关引脚功能) | 电压 | 24 V | |
| 最大电流 | 40 mA | ||
| 传送延时时间 | 1 ms | ||
| 主要IO功能信号 | 功能 | 说明 | |
| 输入信号(端口可以配置) | 正向限位 | 正限位开关 | |
| 负向限位 | 负限位开关 | ||
| 回零点位 | 原点位开关 | ||
| 电机使能 | 外部使能信号 | ||
| 报警清除 | 外部清除报警信号 | ||
| 速度限制 | 扭矩控制时的速度限制输入 | ||
| 输出信号(端口可以配置) | 伺服定位完成 | 伺服执行定位完成信号 | |
| 伺服停止 | 伺服执行停止信号 | ||
| 伺服报警 | 伺服错误报警信号 | ||
| 伺服刹车 | 伺服刹车控制信号 | ||
| 伺服寻相完成 | 伺服寻相完成信号 | ||
| 伺服回零完成 | 伺服回零完成信号 |
伺服模块支持电机反馈规格
| 支持的电机反馈规格 | |||
| 电机反馈 | 规格 | 说明 | |
| 综述 | 驱动器输出电压 | 5 VDC | |
| 驱动器最大输出电流 | 250 mA | ||
| 最大电缆长度 | AWG 28 – 3 m; AWG 24 – 10 m | ||
| 增量式编码器 | 信号 | 有(或无)零位/霍尔信号的 AB 正交信号编码器差分输出 | |
| AB 正交最大输入频率 | 1.6 MHz (正交前) (以后会加到5MHz) | ||
| 最小零位脉冲宽度 | 1 µs | ||
| 霍尔传感器 | 信号 | 单端型 | |
| 正弦编码器(下一个版本会加上) | 信号 | 正余弦差分, 带或不带霍尔 | |
| 信号电平 | 1 Vpp @ 2.5 V | ||
| 最大输入频率 | 270 kHz | ||
| 输入阻抗 | 120 Ω | ||
| 插值 | 最大至16384 (14 位) | ||
| 有效插值 | 最大至 4096 (12 位) |
电机信号反馈线引脚定义
根据实际应用中使用的反馈装置类型进行电机反馈接口的接线。具体参见下文的引脚出线表。 电机温度传感器使用12/25脚,已通过模块内部上拉到5V。
| 电机信号反馈线引脚定义 | |||||
| 接口引脚 | 模块引脚 | 功能 | 接口引脚 | 模块引脚 | 功能 |
| 1 | 97 | 增量编码器A+ | 14 | 98 | 增量编码器A- |
| SSI编码器data+ | |||||
| 2 | 96 | 增量编码器B+ | 15 | 95 | 增量编码器B- |
| SSI编码器clock+ | SSI编码器clock- | ||||
| 3 | 93 | 增量编码器Z+ | 16 | 94 | 增量编码器Z- |
| 4 | 116 | 霍尔U+ | 17 | 115 | 霍尔V+ |
| 5 | 114 | 霍尔W+ | 18 | / | / |
| 6 | / | / | 19 | / | / |
| 7 | / | / | 20 | / | / |
| 8 | / | / | 21 | / | / |
| 9 | 111 | 正弦编码器sine+ | 22 | 110 | 正弦编码器sine- |
| 10 | 109 | 正弦编码器cosine+ | 23 | 108 | 正弦编码器cosine- |
| 11 | 3、4 | 5V电源 | 24 | 与模块共地 | 地(5V回路) |
| 12 | 91 | 电机温度传感器 | 25 | 90 | 电机温度传感器 |
| 13 | 3、4 | 5V电源 | 26 | / | 屏蔽 |
伺服模块I/O口引脚定义
数字/模拟量的输入和输出按您的应用的要求来接线。为了保持数字I/O的隔离,您的24V回路的地接到引脚1和引脚19,驱动数字输入引脚,需要您提供一个24V信号。
| 伺服模块I/O口引脚定义 | |||||||
| 接口引脚 | 模块引脚 | 功能 | 说明 | 接口引脚 | 模块引脚 | 功能 | 说明 |
| 1 | 64 | 数字输入的公共地 | 用户提供24V输入信号的地 | 19 | 72 | 数字输出的公共地 | 用户提供24V上拉的地 |
| 2 | 107 | 等效编码器输出Z+ | 等效编码器输出的信号Z正向 | 20 | 84 | RS485通讯输入- | RS485通讯输入-(或者B端) |
| 3 | / | / | 21 | 83 | 485输入+ | RS485通讯输入+(或者A端) | |
| 4 | 106 | 等效编码器输出Z- | 等效编码器输出的信号Z负向 | 22 | 73 | 数字量输入8 | 光隔离可编程数字输入8 |
| 5 | 104 | 等效编码器输出B+ | 等效编码器输出的信号B正向 | 23 | 74 | 数字量输入7 | 光隔离可编程数字输入7 |
| 6 | / | / | 24 | 75 | 数字量输入6 | 光隔离可编程数字输入6 | |
| 7 | 105 | 等效编码器输出B- | 等效编码器输出的信号B负向 | 25 | 与模块共地 | 数字地 | 数字地 |
| 8 | 112 | 模拟输入量AN+ | 差分模拟量指令输入的正向 | 26 | 76 | 数字量输入5 | 光隔离可编程数字输入5 |
| 9 | 103 | 等效编码器输出A- | 等效编码器输出的信号A负向 | 27 | 77 | 数字量输入4 | 光隔离可编程数字输入4 |
| 10 | 与模块共地 | 数字地 | 数字地 | 28 | 78 | 数字量输入3 | 光隔离可编程数字输入3 |
| 11 | 102 | 等效编码器输出A+ | 等效编码器输出的信号A正向 | 29 | 与模块共地 | 数字地 | 数字地 |
| 12 | 113 | 模拟输入量AN- | 差分模拟量指令输入的负向 | 30 | 68 | 数字量输出3 | 光隔离可编程数字输出,可用OUT3读取 |
| 13 | 与模块共地 | 数字地 | 数字地 | 31 | 65 | 数字量输出6 | 光隔离可编程数字输出,可用OUT6读取 |
| 14 | 87 | 方向输入- | 方向输入的负向 | 32 | 69 | 数字量输出2 | 光隔离可编程数字输出,可用OUT2读取 |
| 15 | 79 | 数字量输入2 | 快速光隔离可编程数字输入,用IN2读取 | 33 | 80 | 数字量输入1 | 快速光隔离可编程数字输入,用IN1读取 |
| 16 | 86 | 方向输入+ | 方向输入的正向 | 34 | 70 | 数字量输出1 | 光隔离可编程数字输出,可用OUT1读取 |
| 17 | 89 | 脉冲输入+ | 脉冲输入的正向 | 35 | 66 | 数字量输出5 | 光隔离可编程数字输出,可用OUT5读取 |
| 18 | 88 | 脉冲输入- | 脉冲输入的负向 | 36 | 67 | 数字量输出4 | 光隔离可编程数字输出,可用OUT4读取 |
伺服模块保护功能及使用环境要求
| 保护功能及使用环境要求 | |||
| 项目 | 规格 | ||
| 保护功能 | 过流、欠压和过压、过温、反馈缺失、STO 信号未连接、位置跟随错误、速度过超、参数错误等。 | ||
| 防飞车保护功能 | 电机在寻相时,屏蔽外部脉冲输入信号功能(脉冲&方向)与接收运动指令功能(RS232),防止电机发生飞车事故。 |
开发
驱动器安装
安装概述
按以下步骤完成驱动器模块的安装及设定。
1.根据需要的运行功率,选择合适的功率底板。
2.完成所有电气链接:
a)将伺服模块安装到模块转接底板上
b)将转接底板和功路板连接
c)电机
d)电机反馈
e)安全转矩切换(STO),或用跳线短接
f)IO控制信号
g)AC输入电源
3.使用USB/232电缆连接驱动器和PC。
4.为驱动器和PC供电。
5.连接至现场总线设备(可选)。
6.打开FortiorTechServoStudio软件(无需安装)。
7.使用FortiorTechServoStudio配置和调试驱动器。
FortiorTechServoStudio调试软件
FortiorTechServoStudio概述
FortiorTechServoStudio是一个图形化用户界面 (GUI) ,与 伺服模块一起提供,用于安装、配置和调试驱动器。FortiorTechServoStudio可用于在线调试驱动器参数及完成特定的驱动器操作。
FortiorTechServoStudio提供两种初始化系统配置方法:
使用【通用-备份和恢复】,点击 “默认参数”完成初始化参数配置,然后在【电机】配置电机参数,在【反馈】配置编码器分辨率。
使用【通用-备份和恢复】,电机“导入参数”导入之前配置过的电机参数数据。
FortiorTechServoStudio主界面包括5个功能区:
1.工具栏,包含常用的快速功能按钮。
Offline|Online – 切换 FortiorTechServoStudio在线/离线状态,并显示连接状态。请参见章节【驱动器在线与离线】 。
Enable|Disable – 使能/禁止驱动器,并显示驱动器的使能状态。
Save – 将当前驱动器 RAM 中的参数保存至驱动器存储器中。建议在配置参数后使用保存按钮,以保存存储器中的参数值。
No FLT — 清除驱动器故障。当驱动器发生故障时该位会变红,电机可以清除故障。
2.信息栏:
Stop —停止电机并禁止驱动器。
Help —FortiorTechServoStudio软件的在线帮助。在该版本软件中并没有开放此功能。
About —软件版本信息,该版本中该功能还未开放。
3.侧边栏:
包含FortiorTechServoStudio界面的一个导航菜单。
侧边栏可以通过该箭头按钮隐藏或显示。
4.主操作界面:显示查看、设定和测试参数和配置驱动器的各个交互式界面。这些界面会在本手册的其他章节中详细说明。
故障显示: 如果没有故障,此段状态栏背景为绿色;若存在故障,则为红色。点击该区域,可打开【故障】界面。
警告显示: 若没有警告,此段状态栏背景为绿色;若存在警告,则为红色。
驱动器状态: 当驱动器使能时,此段状态栏背景为绿色,显示“Drive Active”;当驱动器未使能时为红色,显示“”。
5.状态栏:显示驱动器状态。
故障显示: 如果没有故障,此段状态栏背景为绿色;若存在故障,则为红色。点击该区域,可打开【故障】界面。
警告显示: 若没有警告,此段状态栏背景为绿色;若存在警告,则为红色(目前警告和故障没做区分)。
驱动器状态: 当驱动器使能时,此段状态栏背景为绿色,显示“Drive Active”;当驱动器未使能时为红色,显示“Drive Inactive”。
运行模式: 此段背景为灰色。显示当前运行模式。
Curr:显示当前运行电流。
Vel:显示当前电机转速。
Pos:显示电机当前位置。
Online/Offline:上位机和驱动器连接状态
审核编辑 黄宇
-
控制器
+关注
关注
113文章
16563浏览量
180368 -
伺服电机
+关注
关注
85文章
2068浏览量
58553
发布评论请先 登录
相关推荐
Banana Pi开源社区基于瑞芯微RK3588开发板,DeepSeek开发利器
Banana Pi BPI-CanMV-K230D-Zero :AIoT 应用的 Kendryte K230D RISC-V
关于峰岹的调试问题
Banana Pi BPI-R3路由器开发板运行 OrayOS物联网系统

Banana Pi BPI-R3路由器开发板运行 OrayOS物联网系统
基于Banana Pi BPI-5202 龙芯2K2000的工业控制网关设计
峰岹科技推出“扫、振一体伺服控制”电动牙刷方案

Banana Pi BPI-R3 联发科MT7986方案开源路由器开箱及性能测试

Banana Pi BPI-F3 进控时空SpacemiT K1芯片场景功耗测试
Banana Pi BPI-M4 Berry 开源硬件开发板以太网口和WiFi测试
峰岹科技:携领先的电机控制芯片及解决方案登陆EMK韩国展表现亮眼





 工商网监
工商网监
评论