 【技术分享】带你认识什么是“示教器”
【技术分享】带你认识什么是“示教器”
 “示教器”是什么?
“示教器”是什么?
示教器全称叫做“示教编程器”,是一种应用于机器人控制的手持式装置。在机器人的运动控制系统中,示教器通过通讯电缆连接控制柜或者运动控制器,通过设置运动参数与编写机器人的运动路径,即可让机器人按照编写好的工艺文件进行工作,并可以对机器人的运动进行实时的监控、调整、安全急停等操作。还可配置成手动操纵模式,实时操作机器人移动。
“示教器”的组成部分及作用

|
旋钮开关 |
可进行示教、运行、远程三种状态选择 |
|
8inch显示区域 |
可进行触摸功能操作、界面显示区域 |
|
系统按键 |
系统复位、V+、V-(调节机器运行速度)、单步运行、坐标、清除、开关机 |
|
指示灯 |
可提示当前示教器的上电情况、运行状态 |
|
急停开关 |
用于紧急情况下,停止设备工作 |
|
自定义按键 |
用户可对 F1-F3 对应的功能进行定义,简化操作 |
|
信号连接线 |
用户通过连接尾线,可给示教器供电或与示教器进行通讯 |
|
用户可进行数据交换 |
|
|
安全使能开关 |
手动状态下按住安全使能开关,示教器使能,此时用户才可操作示教器 |
|
电阻触摸笔 |
方便客户操作触摸屏 |
|
手柄 |
提供给客户支撑点,用户使用示教器更舒适 |
 “示教器”的使用方法
“示教器”的使用方法
- 工艺编程:用户需创建工艺文件,再根据自己的需求进行编程和逻辑控制,当程序完成后,需轻握使能开关,才可对机器人进行程序调试;
- 实时控制:用户在轻握安全使能开关后,可直接通过操作示教器面板按键对机器人进行实时控制。
2. 当示教器设置为运行模式时,需先按下伺服使能按键,使能接通所有控制的伺服驱动单元,然后把在示教模式中调试好的工艺文件加载进来,示教器则会全速运行编程好的工艺文件,用户可通过示教器屏幕观察机器人的运行情况,起到监控的功能。
3. 当示教器设置为远程模式时,用户可使用网线连接计算机与示教器,再进行在线调试。用户可先在计算机上面进行界面参数设置和工艺开发,后将程序下载给示教器,即可进行在线调试。还可先将工艺文件拷贝到U盘,将U盘插入示教器,再进行加载运行。
使用“示教器”的优点1. 编程简单。目前的示教器都会对其内部复杂的代码按照功能块的形式打包,所以用户只需要使用示教器的功能块进行编程即可,编程门槛低,简单方便。
2. 丰富的工作组件。示教器内部集成了各种各样的组件,不仅可控制机器人,还可以控制整个系统需要使用的其他组件,通过添加控制逻辑,协商不同组件之间的协同工作。
3. 安全。为了保证操作的安全性,示教器设计了安全使能开关。当轻握安全使能开关时,机器人的伺服驱动单元就会处于接通状态,此时可操作机器人运动。当未按下或者重握安全使能开关时,机器人的伺服驱动单元就会处于断开状态,机器人停止动作,这可防止操作者在失去行为能力或过度紧张误操作时,造成人员受伤或者机器损坏。
4. 监控。在示教器运行模式中,操作者设置示教器执行编程好的工艺文件,示教器会自动运行程序。此时无需再操作示教器,示教器的显示界面会反馈机器人的运行情况及判断机器人的运行是否存在异常或者错误行为。
5. 实时调整。示教器对机器人的控制存在一个精度的问题,也就是当对机器人的控制未达到设定的预期时,可通过调整示教器参数进行补偿,减少对机器人控制的误差。
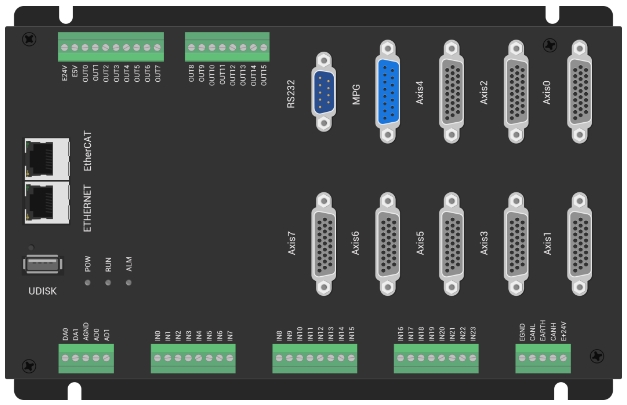
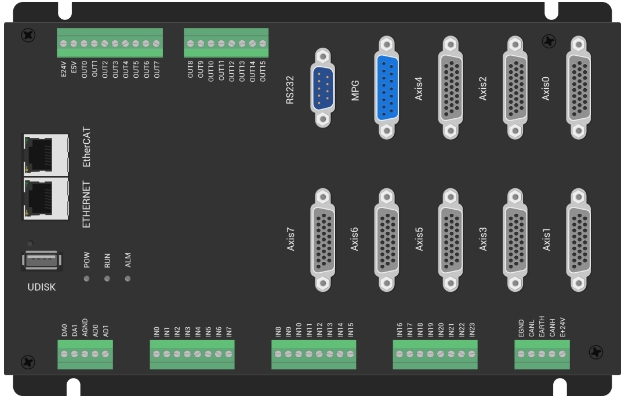
ZTP800示教器介绍
更多往期文章,请点击“阅读原文”。

-
致远电子
+关注
关注
13文章
410浏览量
31610
原文标题:【技术分享】带你认识什么是“示教器”
文章出处:【微信号:ZLG_zhiyuan,微信公众号:ZLG致远电子】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
产教新篇|长沙新一代信息技术产教联合体扬帆启航!

智能拖动示教喷涂机器人:技术革新与未来展望

CRT激光焊接示教系统功能详解及应用场景与效益分析

杰和课堂|带你认识算力

讯维分布式可视化医疗示教系统,开启智慧医疗,远程示教全新应用

示教器的革新:无线连接,无限可能

什么是拖动示教?机器人拖动示教方式分析

基于导纳控制的机器人拖动示教原理和实现步骤
焊接机器人示教模式怎么设置






 工商网监
工商网监
评论