 汽车网络架构是什么意思
汽车网络架构是什么意思
基于CAN-FD的新一代汽车网络架构
传统的车载CAN总线最高支持500 kbit/s的传输速率,每帧只能承载8 bytes的数据,由于传输速率和数据长度的限制,在自动驾驶和智能网联对网络通信的高要求背景下,使用传统 CAN 通信势必会导致总线负载率过高从而导致网络拥堵,传统CAN总线通信的瓶颈逐渐凸显。
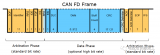
2011年,为满足带宽和可靠性的需求,Bosch首次发布了 CAN-FD(CAN With Flexible Data-Rate)方案,CAN-FD继承了传统CAN总线的主要特性,使用改动较小的物理层,双线串行通信协议,依然基于非破坏性仲裁技术,分布式实时控制,可靠的错误处理和检测机制,在此基础上对带宽和数据长度进行优化,将逐步取代传统CAN成为下一代主流汽车总线系统,与车载以太网搭配构建未来汽车的网络骨架。
车联网、V2X 和自动驾驶对汽车网络高带宽、低延迟的高要求,使得以传统CAN为骨架的汽车网络架构已逐步退出历史舞台。
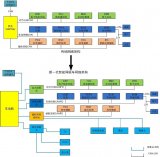
车载以太网技术的发展为高带宽提供了可能性,但车载以太网由于其点对点通信和非实时的协议特性使其无法满足车控功能对高实时性和一对多通信的需求,而 CAN-FD 基于传统CAN 的核心特征,继承了总线仲裁和广播通信特性,非常适用于车控信息的交互。利用 CAN-FD 与车载以太网的协议特征,主机厂已构建出以CAN-FD和车载以太网为网络骨架的新一代智能汽车的网络架构。
车载以太网在一汽的量产车型上也已得到应用,用于实现了安全防护、车况查询、远程控制、手机泊车、移动网络、WiFi 功能、定位导航、信息推送方面功能。在该车型上,以车载以太网和 CAN-FD 为主干网络,研发工程师搭建了面向服务的集信息域、互联域、自动驾驶域、底盘域的多域融合的新一代整车网络架构。
-
汽车电子
+关注
关注
3028文章
8021浏览量
167732 -
架构
+关注
关注
1文章
519浏览量
25541 -
汽车
+关注
关注
13文章
3598浏览量
37616
发布评论请先 登录
相关推荐
安森美半导体针对汽车照明应用的LED及电机驱动方案
汽车照明典型应用及LED照明驱动方案合集
整车厂如何快速实现测试设备CANFD升级?
恩智浦宣布推出用于安全汽车高性能计算的BlueBox 3.0开发平台
iPhone的网络安全领先汽车数年?
应用同轴电缆供电的车载LVDS传输如何选择电感
一文浅析汽车CAN-FD总线的通信应用
智能网联车CANFD及车载以太网的应用
智能汽车网络架构及CANFD升级资料下载

致远电子CAN智慧云如何赋能ECU远程刷写
基于以太网的汽车网络架构解决方法
向下一代汽车区域架构转型,诸多挑战如何轻松化解?(文末有彩蛋)

基于CAN-FD的新一代汽车网络架构
同星智能受邀参加CiA中国技术日






 工商网监
工商网监
评论