 matlab-粒子群算法优化simulink中的pid参数详解
matlab-粒子群算法优化simulink中的pid参数详解
PSO(粒子群算法)在处理连续问题上有着较强的能力,因此很适合用来做参数优化,而PID控制器由三个参数组成,它们分别是:Kp 、Ki 、Kd 。
我们可以把PID控制器当做一个“黑箱”,输入为这三个参数,输出为响应曲线,我们要做的就是优化这个响应曲线。而一个控制效果好的PID控制器应针对不同类型输入都有较快的响应速度,较小的超调以及稳态误差。在本次分享中,选择输入信号为阶跃输入用来衡量PID控制效果。
PSO的适应函数选用综合指标来衡量设计效果,由于是数字控制器,我们选用求和而不是积分的方式:
在特定的问题中,这个适应函数也可以按照实际需求修改,比如分析超调量、稳定时间等,具体问题具体分析
PSO的主函数和之前的案例类似
参数设置
wmax = 1; % 最大惯性因子
wmin = 0.6; % 最小惯性因子
% w = 0.6; % 惯性因子
c1 = 2; % 加速常数
c2 = 2; % 加速常数
Dim = 3; % 维数
SwarmSize = 30; % 粒子群规模
ObjFun = @PSO_PID; % 待优化函数句柄
MaxIter = 10; % 最大迭代次数
MinFit = 0.1; % 最小适应值
Vmax = 1;
Vmin = -1;
Ub = [300 300 300];
Lb = [0 0 0];
其中的Ub和Lb分别是kp ki kd的上下限,开始优化的时候可以设置大一点,如果大概知道范围,也可以缩小范围,减少迭代次数
粒子群初始化
Range = ones(SwarmSize,1)*(Ub-Lb);
Swarm = rand(SwarmSize,Dim).*Range + ones(SwarmSize,1)*Lb; % 初始化粒子群
VStep = rand(SwarmSize,Dim)*(Vmax-Vmin) + Vmin; % 初始化速度
fSwarm = zeros(SwarmSize,1);
for i=1:SwarmSize
fSwarm(i,:) = PSO_PID(Swarm(i,:)); % 粒子群的适应值
end
%% 个体极值和群体极值
[bestf,bestindex]=min(fSwarm);
zbest=Swarm(bestindex,:); % 全局最佳
gbest=Swarm; % 个体最佳
fgbest=fSwarm; % 个体最佳适应值
fzbest=bestf; % 全局最佳适应值
迭代寻优
iter = 0;
y_fitness = zeros(1,MaxIter); % 预先产生4个空矩阵
K_p = zeros(1,MaxIter);
K_i = zeros(1,MaxIter);
K_d = zeros(1,MaxIter);
while( (iter < MaxIter) && (fzbest > MinFit) )
w = wmax-(wmax-wmin)/MaxIter*iter; %% 惯性权重因子调整
for j=1:SwarmSize
% 速度更新
VStep(j,:) = w*VStep(j,:) + c1*rand*(gbest(j,:) - Swarm(j,:)) + c2*rand*(zbest - Swarm(j,:));
if VStep(j,:) >Vmax, VStep(j,:)=Vmax; end
if VStep(j,:)< Vmin, VStep(j,:)=Vmin; end
% 位置更新
Swarm(j,:)=Swarm(j,:)+VStep(j,:);
for k=1:Dim
if Swarm(j,k) >Ub(k), Swarm(j,k)=Ub(k); end
if Swarm(j,k)< Lb(k), Swarm(j,k)=Lb(k); end
end
% 适应值
fSwarm(j,:) = PSO_PID(Swarm(i,:));
% 个体最优更新
if fSwarm(j) < fgbest(j)
gbest(j,:) = Swarm(j,:);
fgbest(j) = fSwarm(j);
end
% 群体最优更新
if fSwarm(j) < fzbest
zbest = Swarm(j,:);
fzbest = fSwarm(j);
end
end
iter = iter+1; % 迭代次数更新
y_fitness(1,iter) = fzbest; % 为绘图做准备
K_p(1,iter) = zbest(1);
K_i(1,iter) = zbest(2);
K_d(1,iter) = zbest(3);
end
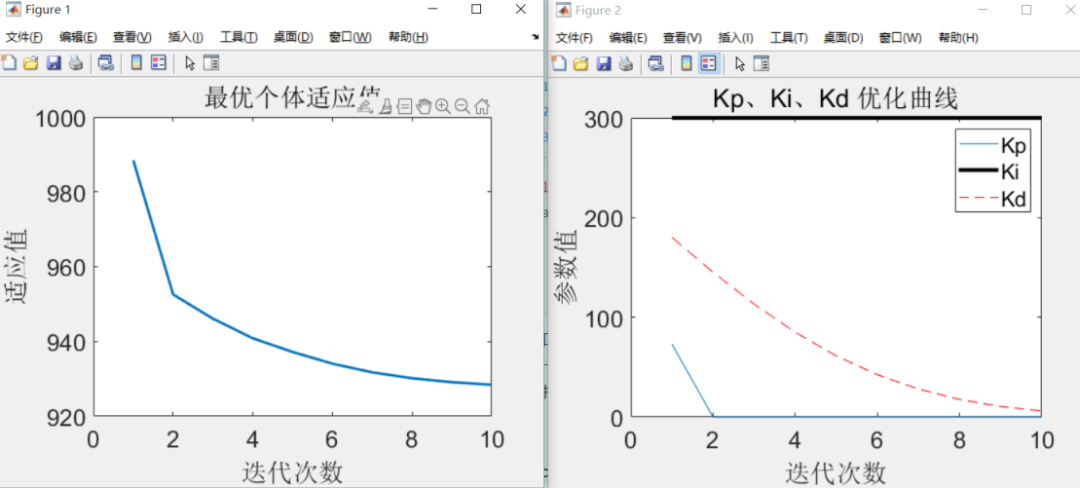
绘图输出
figure % 绘制性能指标ITAE的变化曲线
plot(y_fitness,'LineWidth',2)
title('最优个体适应值','fontsize',18);
xlabel('迭代次数','fontsize',18);ylabel('适应值','fontsize',18);
set(gca,'Fontsize',18);
figure % 绘制PID控制器参数变化曲线
plot(K_p)
hold on
plot(K_i,'k','LineWidth',3)
plot(K_d,'--r')
title('Kp、Ki、Kd 优化曲线','fontsize',18);
xlabel('迭代次数','fontsize',18);ylabel('参数值','fontsize',18);
set(gca,'Fontsize',18);
legend('Kp','Ki','Kd');
目标函数设计
function z=PSO_PID(x)
assignin('base','Kp',x(1)); %粒子依次赋值给Kp
assignin('base','Ki',x(2)); %粒子依次赋值给Ki
assignin('base','Kd',x(3)); %粒子依次赋值给Kd
try %% simulink仿真异常,返回一个极大值
y_out=sim('PID_Model',[0,20]); %使用命令行运行控制系统模型
z = y_out.yout{1}.Values.Data(end);
catch
z=1e6;
end
代码中assignin实现了m文件和simulink传递参数,其中y_out是simulink输出的目标变量,为啥这儿需要一个try呢,因为这个优化的过程中,可能参数设置不合理,会抛出simulink报错,故增加一个try避免代码异常出错提前结束优化过程
simulink模型用一个简单的pid控制带时延的传递函数
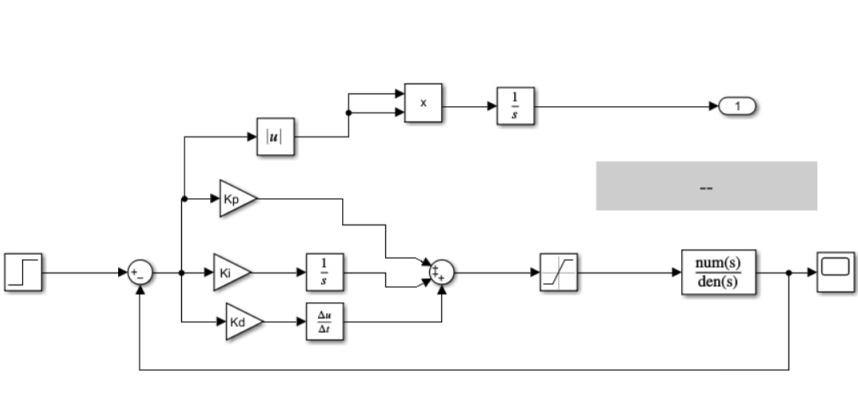
仿真结果类似这样,因为迭代次数很少,设计中可以加大,得到更优的结果
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
MATLAB仿真
+关注
关注
4文章
176浏览量
20085 -
PID控制器
+关注
关注
2文章
173浏览量
18827 -
粒子群算法
+关注
关注
0文章
63浏览量
13119 -
数字控制器
+关注
关注
0文章
96浏览量
19619 -
simulink仿真
+关注
关注
0文章
75浏览量
8641
发布评论请先 登录
相关推荐
PSO算法在数控机床交流伺服系统PID参数优化中的应用
PSO算法在数控机床交流伺服系统PID参数优化中的应用摘要:针对发展高精度数控机床的要求,在数控机床交流伺服控制系统
发表于 05-17 11:38
粒子群算法城镇能源优化调度问题
computation)。源于对鸟群捕食的行为研究。粒子群优化算法的基本思想:是通过群体中个体之间的协作和信息共享来寻找最优解.PSO的优势:在于简单容易实现并且没有许多
发表于 07-07 06:04
基于粒子群优化的模糊PID控制器研究
针对阀控非对称伺服缸非线性、参数时变的特点,考虑到油液压缩特性的影响,建立了包含变体积弹性模量的系统数学模型。提出一种基于粒子群算法优化( PSO)的模糊自适应
发表于 03-05 16:00
•2次下载
如何使用免疫粒子群优化算法实现增量式的PID控制
基于粒子群优化算法的收敛速度快简单易实现的特点和免疫算法的免疫记忆、免疫自我调节和多峰值收敛的特点,本文设计出免疫粒子群
发表于 11-01 15:41
•7次下载






 工商网监
工商网监
评论