 STM32定时器(一)PWM输出
STM32定时器(一)PWM输出

一、 STM32定时器分类众多,按照内核、外核标准分为两部分:核内定时器+核外定时器
1)核内定时器:Systick
2)外设定时器:特定应用定时器+常规定时器
3)特定应用定时器:LPTIM,RTC,WTD,HRTIM
4)常规定时器:基本定时器TIM6&TIM7)、通用定时器(TIM2TIM5,TIM9TIM14)、高级定时器(TIM1&TIM8)
【常规定时器:
- 基本定时器:计划没有任何对外输入/输出,常用作时基,实现基本的计数和定时功能。
- 通用定时器:除了基本的定时器的时基功能外,还可以对外作输入捕获、输出比较以及连接其他传感器接口(除了编码器和霍尔传感器)
- 高级定时器:此类的定时器功能强大,除了具备通用的定时器的功能外,还包含一些与电机控制和数字电源应用的相关功能,比方带死区控制的互补信号输出、紧急刹车关断输入控制。】
按照计数器的位宽来分:分为3部分
1)16bit定时器
2)32bit定时器(TIM2、TIM5)
3)24bit定时器(Systick)
二、三种 定时器 (高级&通用&基本)区别
对于STM32F4XX,三种定时器(高级、通用、基本)的区别如下表

根据以上表格,可以看出
1)高级定时器(TIM1&TIM8)是16bit,支持向上、向下、向上/向下计数模式,可以产生DMA请求,捕获/比较通道有4个,支持互补输出(带可编程死区的互补输出)
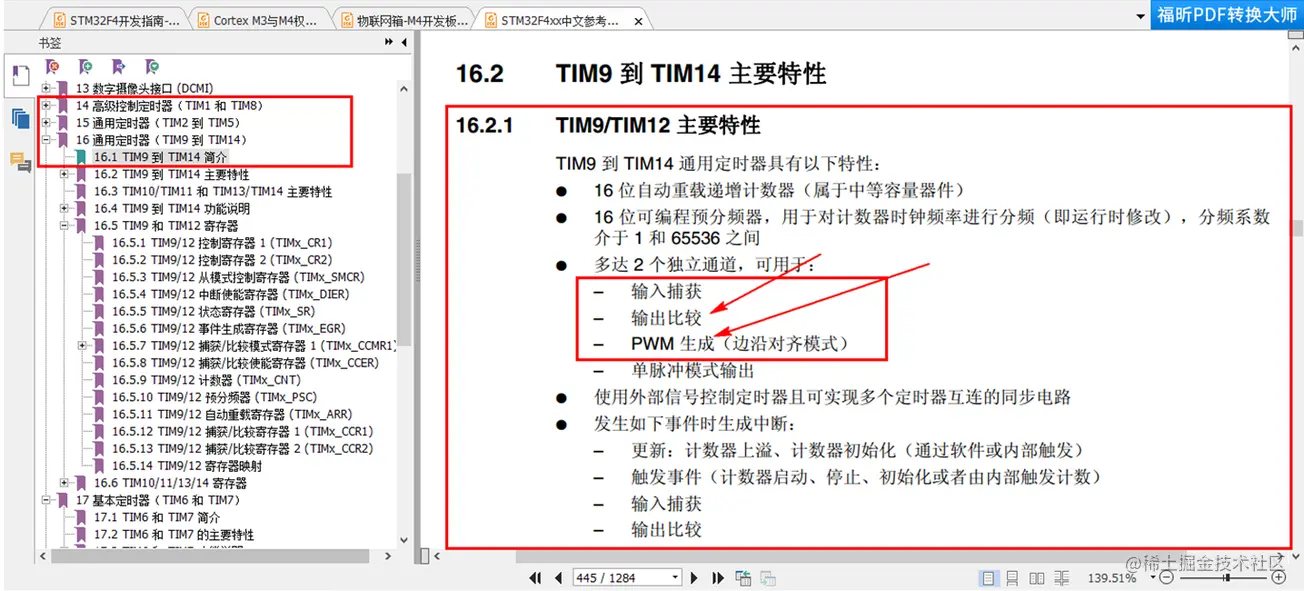
2)通用定时器又分为三种,32bit(TIM2&TIM5)和16bit(TIM3&TIM4),这两种支持向上、向下、向上/向下计数模式,且都可以产生DMA请求,捕获/比较通道4个,16bit(TIM9TIM14)只能向上计数,不能产生DMA请求,捕获/比较通道只有2个,没有这三种都无互补输出,都能应用于定时器技术,PWM输出,输入捕获,输出比较。可以认为TIM9TIM14是TIM2&TIM5&TIM3&TIM4的简单版本。
3)基本定时器(TIM6&TIM7)是16bit,支持向上、向下、向上/向下计数,可以产生DMA请求,没有捕获/比较通道和互补输出,只能用于驱动DAC。
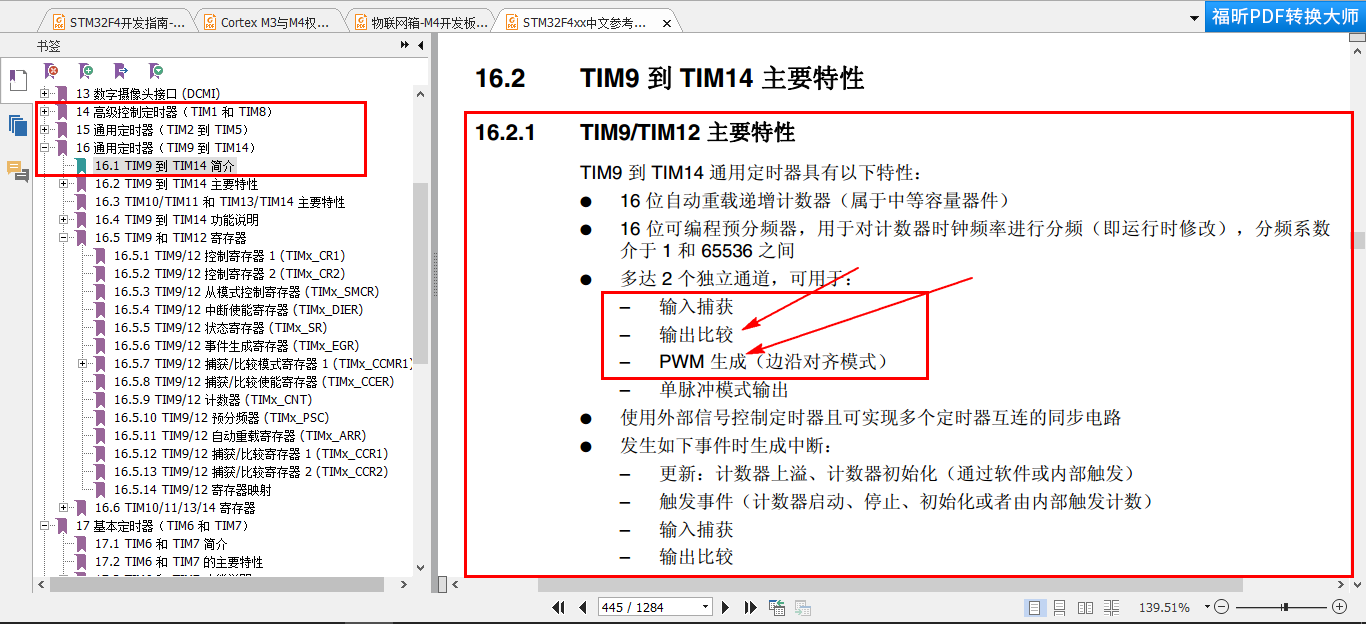
三、通用定时器的特性(以TIM2.TIM3,TIM4.TIM5为例)
1)16bit/32bit递增、递减、递增/递减(中心对齐)计数模式,自动重载计数器;
2)16bit可编程预分频器(可实时修改),用于对计数器时钟进行分频,分频系数介于1~65535之间;
3)多达4个独立通道
--输入捕获
--输出比较
--PWM生成(边沿和中心对齐模式)
--单脉冲模式输出
4)可使用外部信号(TIMx_ETR)控制定时器和定时器互连(可以用1个定时器控制另外一个定时器)同步电路
5)如下事件发生时,可以产生中断/DMA请求(6个独立的IRQ/DMA请求生成器)
- 更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或内部/外部触发)
- 触发事件(计数器启动、停止、初始化或由内部/外部触发计数)
- 输入捕获
- 输出比较
- 会吃针对定位的增量(正交)编码器和霍尔传感器电路
- 触发输入作为外部时钟或按周期的电流管理
6)STM32的通用定时器可以被用于:测量输入信号的脉冲长度(输入捕获)或者产生输出波形(输出比较和PWM)
7)使用定时器预分频器和RCC时钟控制器预分频器,脉冲长度和波形周期可以在几个us到几个毫秒之间调整。SMT32的每个通用定时器都是完全独立的,没有互相共享的任何资源。
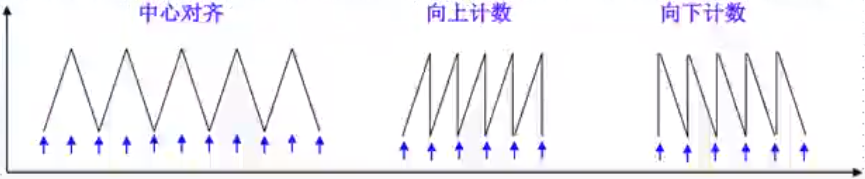
四、计数器模式
通用定时器可以向上、向下、向上/向下双向计数模式
- 向上计数模式:计数器从0计数到自动加载值(TIMx_ARR),然后重新从0开始计数并且产生一个计数器向上溢出事件
- 向下计数模式:计数器从自动装入的值(TIMx_ARR)向下计数到0,然后从自动装入的值重新开始,并产生一个计数器向下溢出事件
- 向上/向下双向计数模式(中央对齐模式)
五、定时器框图分析
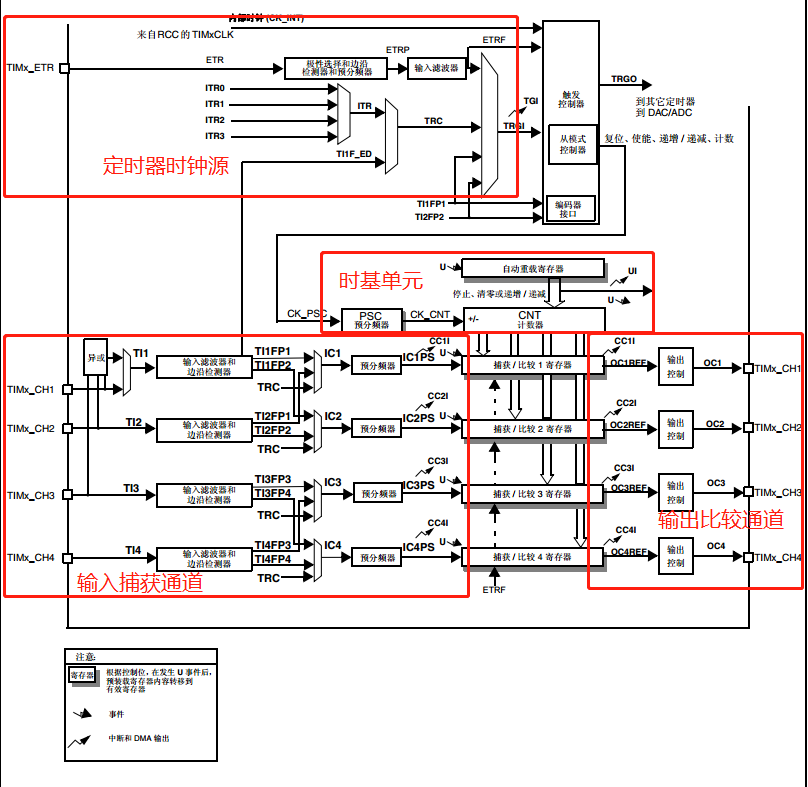
框图可以分为以下4个部分
第一部分:定时器时钟源
定时器时钟可由下列时钟源提供:
- 内部时钟(CK_INT)(内部RCC提供的时钟)
- 外部时钟模式1:外部输入引脚(TIx)
- 外部时钟模式2:外部触发输入(ETR),仅适用于TIM2,TIM3,TIM4
- 内部触发输入(ITRx):使用一个定时器作为另外一个定时器的预分频器,例如可以将定时器配置为定时器2的预分频器
第二部分:时基单元 :主要包括预分频寄存器(TIMx_PSC)、自动重装载寄存器(TIMx_ARR)、计数器寄存器(TIMx_CNT)
第三部分:输入捕获通道
第四部分:输出比较通道
六、PWM输出
PWM输出主要用到定时器框图中的第四部分:时基单元和输出比较通道
PWM工作过程(通道1为例)
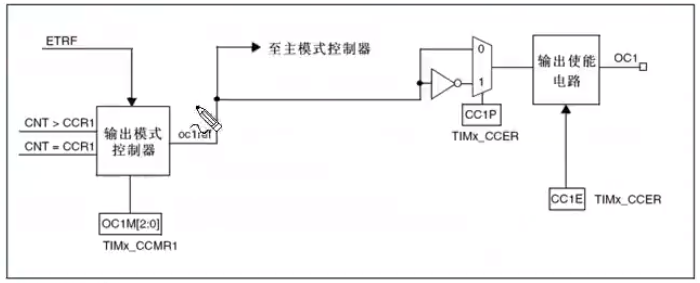
CCR1:捕获/比较值寄存器(x=1,2,3,4),设置比较值
CCMR1:OC1M[2:0]位:对于PWM方式下,用于设置PWM模式1【110】或PWM模式2【111】
CCER:CC1P位:捕获/比较1输出极性,0:高电平有效,1:低电平有效
CCER:CC1E位:捕获/比较1输出使能,0:OC1关闭,1:OC1打开
PWM模式1;在递增计数模式下,只要 TIMx_CNTTIMx_CCR1,通道 1 便为无效状态 (OC1REF=0),否则为有效状态 (OC1REF=1)。
PWM模式2:在递增计数模式下,只要 TIMx_CNTTIMx_CCR1,通道 1 便为有效状态,否则为无效状态。
注意:在 PWM 模式 1 或 PWM 模式 2 下,仅当比较结果发生改变或输出比较模式由“冻结”模式切换到“PWM”模式时, OCREF 电平才会发生更改
如下图就是PWM模式2的例子
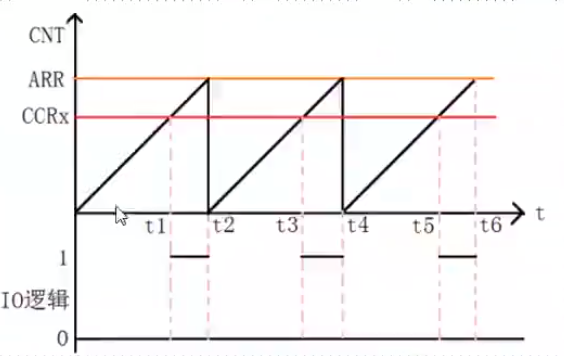
当配置某个IO口为PWM1模式,TIMx_CNT=TIM_CCR1,通道1有效,输出高电平。
PWM模式本质是可以产生一个由TIMx_ARR寄存器确定频率,由TIMx_CCRx寄存器确定占空比的信号。在TIMx_CCMRx寄存器中的OCxM位写入"110-PWM模式1","111-PWM模式2",能够独立地设置每个OCx输出通道产生一路PWM,必须设置TIMx_CCMRx寄存器OCxPE位以使能相应的预装载寄存器,最好还要设置TIMx_CR1寄存器的ARPE位,(在向上计数或中心对称模式中)使能自动重装载的预装载寄存器。
注意:此处提到的“ 必须设置TIMx_CCMRx寄存器OCxPE位以使能相应的预装载寄存器.. .”目的是满足一些特殊的需求,使能预装载的意义在于可以多个通道同时输出时,时序能准确地同步。网上的一段有意义的解释是:设计preload register和shadow register的好处是,所有真正需要起作用的寄存器(shadow register)可以在同一个时间(发生更新事件时)被更新为所对应的preload register的内容,这样可以保证多个通道的操作能够准确地同步。如果没有shadow register,或者preload register和shadow register是直通的,即软件更新preload register时,同时更新了shadow register,因为软件不可能在一个相同的时刻同时更新多个寄存器,结果造成多个通道的时序不能同步,如果再加上其它因素(例如中断),多个通道的时序关系有可能是不可预知的。可见如果只是单通道输出,多通道输出时没时序精准的同步更新要求,不使能也可以的。
**七、PWM编程
**
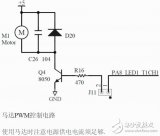
1)要求:使用TIM14的PWM功能,输出频率不变,占空比变化的PWM波,驱动LED灯,达到LED的亮度由暗变亮,由从亮变暗,如此往复。
2)编程步骤
2-1,使能定时器时钟和对应的GPIO时钟,
2-2 初始化IO口为复用功能输出,并将复用功能映射到对应的定时器
2-3 初始化定时器,ARR,PSC等
2-4 初始化输出比较参数
2-5 使能预装载寄存器和ARPE位
2-6 使能定时器
2-7不断改变比较值CCRx,达到不同的占空比;
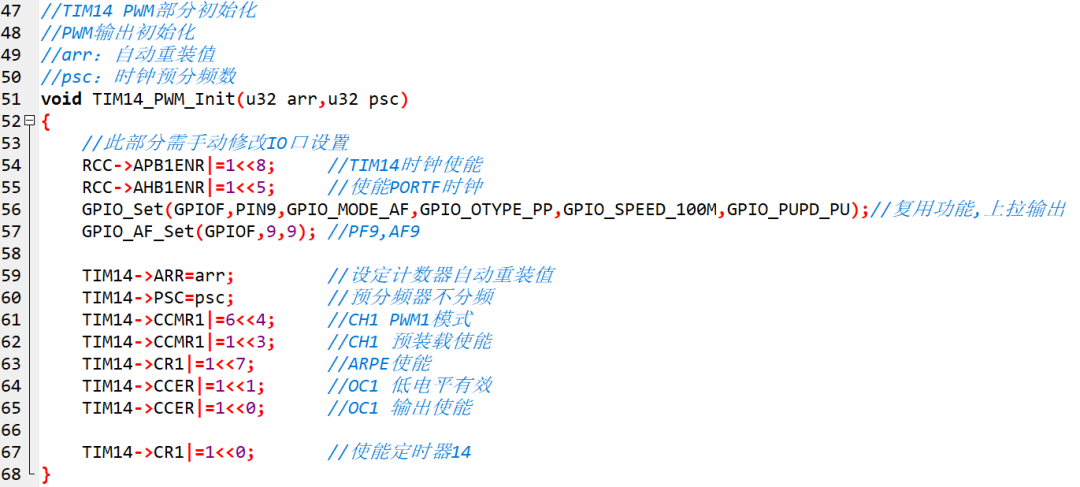
在功能函数中,我们初始化要设置好arr和psc,TIM14采用的APB1(42MHz)经过2倍的倍频获得的频率(84MHz),预分频系数设置为84,那么PWM的频率为1MHZ,自动重装载值arr=500,则PWM的频率为1MHZ/500=2kHz。
TIM14_PWM_Init(500-1,84-1); //1Mhz的计数频率,2Khz的PWM.
u16 led0pwmval=0;
u8 dir=1;
pwm_func{
if(dir)led0pwmval++;
else led0pwmval--;
if(led0pwmval >300)dir=0;//实测当TIM_CNT大于300时,亮度变化不明显,故此处设置为300为最亮
if(led0pwmval==0) dir=1;
TIM14- >CCR1 =led0pwmval;
-
电机控制
+关注
关注
3601文章
2173浏览量
279058 -
STM32F4
+关注
关注
3文章
204浏览量
30307 -
预分频器
+关注
关注
0文章
18浏览量
8500 -
PWM输出
+关注
关注
1文章
68浏览量
6820 -
stm32定时器
+关注
关注
0文章
13浏览量
2554
发布评论请先 登录
STM32单片机如何通过定时器的控制输出PWM

浅谈定时器基础知识与PWM输出原理

STM32单片机一个定时器输出不同频率PWM波

stm32F051系列 单片机引脚定时器输出pwm波形控制风扇转速
电机控制基础——定时器基础知识与PWM输出原理
STM32F407入门开发: 配置定时器输出PWM方波



评论