 KUKA机器人Beckhoff I/O模块配置方法
KUKA机器人Beckhoff I/O模块配置方法
EtherCAT 是 EtherCAT Technology Group 公司一种以以太网为基础的开放式
现场总线系统。
KRC4 配置 EtherCAT 输入输出模块

一、硬件 Hardware
二、软件 Software
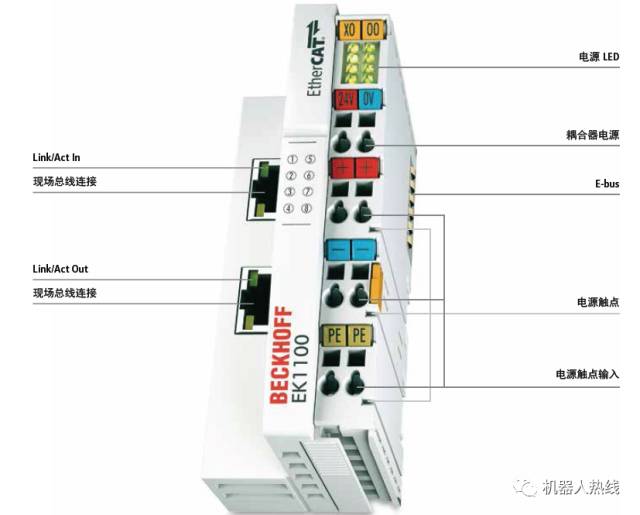
三、硬件连接 Connection
参照电气图纸将硬件连接。
四、WorkVisual配置 Configration
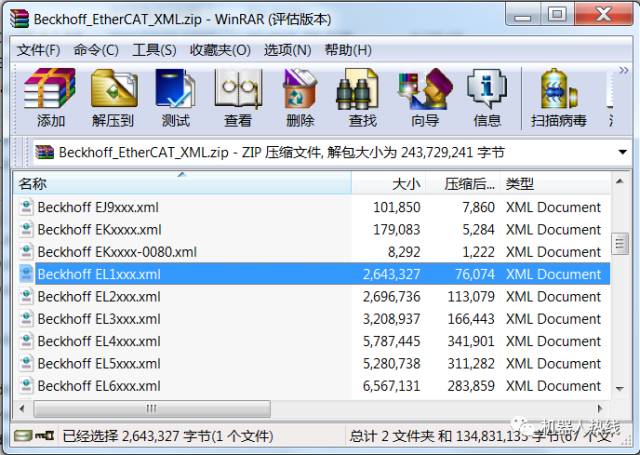
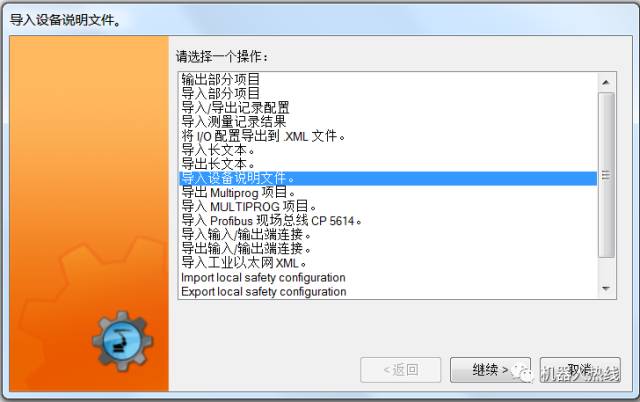
1.导入设备描述文件
参见 Workvisual。这里需要导入 EL1XXX 和 EL2XXX 两个文件。对应 输入模块 EL1809 、输出模块 EL2024/ EL2809。
注:根据模块的具体型号添加相应的 device description文件。
2.具体步骤:
打开 Workvisual, 菜单 File--- Import/Export --- Import device description file --- 选择文件类型 ESI,选择导入, device description导入完成。
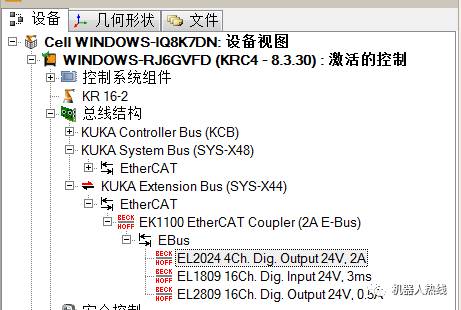
3.总线模块的配置

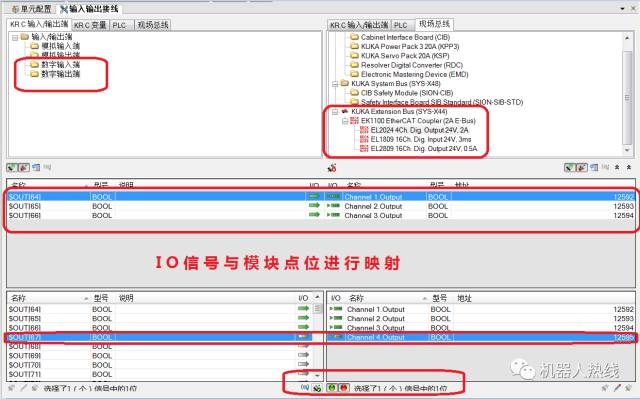
五、输入输出映射配置 IO Mapping
根据电气设计及电气信号的规划进行信号映射,在IO MAPPING 窗口进行相应信号ID的IO映射。具体过程如下图所示。
六、项目配置安装 Configuration Deployment

审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
模块
+关注
关注
7文章
2749浏览量
48086 -
机器人
+关注
关注
212文章
28882浏览量
209504 -
总线
+关注
关注
10文章
2913浏览量
88660 -
ethercat
+关注
关注
19文章
788浏览量
39079
原文标题:【干货】KUKA机器人 Beckhoff I/O模块配置
文章出处:【微信号:你身边的机器人专家,微信公众号:你身边的机器人专家】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
零基础玩转工业机器人
知识体系分解细化,对ABB工业机器人知识要点做了针对性解析,并配以详细的操作步骤。全书以工业机器人组成为切入点,系统地介绍了ABB工业机器人的主要技术参数、手动操纵方法、坐标系定义流程
发表于 10-29 17:03
KUKA机器人问题解答
1 开机坐标系无效 世界坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在世界坐标系中移动,枪头也随着改变方向,那就是我们在
发表于 07-15 07:48
库卡KUKA机器人四种启动方式介绍
库卡KUKA机器人四种启动方式1)自动运行说明 库卡机器人处于自动运行时,先要在手动状态时候选择需要运行的程序,然后通过钥匙开关切换机器人到自动运行状态,给
发表于 09-04 15:45
KUKA库卡机器人伺服驱动器相关型号举例
)KUKA库卡 00-105-414 KSD1-64 伺服驱动器 (E93DA143I4B531)KUKA库卡 00-107-300 机器人伺服驱动控制器 (E93DE143E4B53
发表于 09-08 16:30
KUKA焊接机器人伺服电机常见故障及维修处理
KUKA焊接机器人伺服电机常见故障及维修处理1、库卡机器人伺服电机的基本检查由于库卡机器人伺服电机内含有精密检测器,因此,当发生碰撞、冲击时可能会引起故障,在对库卡
发表于 09-26 16:51
工业机器人组成结构相关资料分享
工业机器人是近两年机械行业最热的字眼,随着企业工业机器人的增多,很多机械工程师对于工业机器人充满了好奇。作为机器人四大家族之一的KUKA,已
发表于 07-05 06:44
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
我看NI有Robotics Toolkit for KUKA KR C2的附加包,这个怎么用啊?如何和kuka机器人建立通讯啊?是Tcp接口吗?
发表于 10-21 20:59
KUKA库卡机器人MGV电源模块维修PH1013-2840
KUKA库卡机器人MGV电源模块维修PH1013-2840MGV电源维修 库卡电源模块维修 机器人电源模
发表于 01-12 10:39
•11次下载

仿真技术入门与实训项目四ABB机器人I/O配置
了解DSQC652输入输出模块结构和接口连接说明;掌握在RobotStudio的虚拟示教器中进行I/O配置方法;掌握在RobotStudio
发表于 08-24 09:33
•8次下载






 工商网监
工商网监
评论