 几款好用的可视化工具推荐
几款好用的可视化工具推荐
1说在前面的话
在开发IMU设备时,我们经常需要验证算法的正确性,并通过图表、图形和图像的可视化方式更直观地呈现数据和信息。这样可以更清晰地理解和分析复杂的数据关系,从而更好地进行算法的修正。同时,利用可视化软件可以简洁、清晰地理解和记忆数据,并帮助我们发现数据中的模式和趋势。通过可视化工具,我们可以更容易地发现隐藏在数据背后的规律,从而发现新的洞察和机会。 因此,使用可视化工具具有以下优越性:
实时监测:可视化软件能够实时显示IMU设备的数据输出,帮助我们监测设备的运行状态。通过图表、图形或动画,可以直观地观察传感器数据的变化,从而更好地了解设备的行为。
故障排除:可视化软件可以帮助我们快速发现设备中的问题。通过可视化图像或图表,我们可以轻松地识别异常或错误的数据,从而迅速定位故障并进行修复。
数据分析:可视化软件可以帮助我们更好地分析IMU设备的数据。通过绘制图表、绘制轨迹或绘制动画,我们可以更直观地观察设备的运动、姿态或其他相关参数,以便更深入地分析和理解设备的性能。
参数调整:可视化软件可以帮助我们进行参数调整和优化。通过实时可视化,我们可以观察到不同参数设置对设备输出的影响,从而更好地调整参数以达到最佳性能。
以下是几款好用的可视化工具推荐:
2 WolframAlpha
网址链接:https://www.wolframalpha.com/
WolframAlpha是一个计算知识引擎,不同于传统的搜索引擎。它利用内置的人工智能语义分析技术,从公众和授权资源中发掘和建立一个庞大的经过组织的数据库。通过高级的自然语言算法处理,它能够提供类似于谷歌搜索的功能。除了强大的数学计算能力,WolframAlpha还涵盖了物理、化学、人文、金融、日常生活等多个领域。
eg. 我们输入四元数 quaternion(1,0,0,0.001) 它会给到我们一下信息
它的功能很强大,遇到具体问题可以尝试用它搜索一下,会有意外收获。
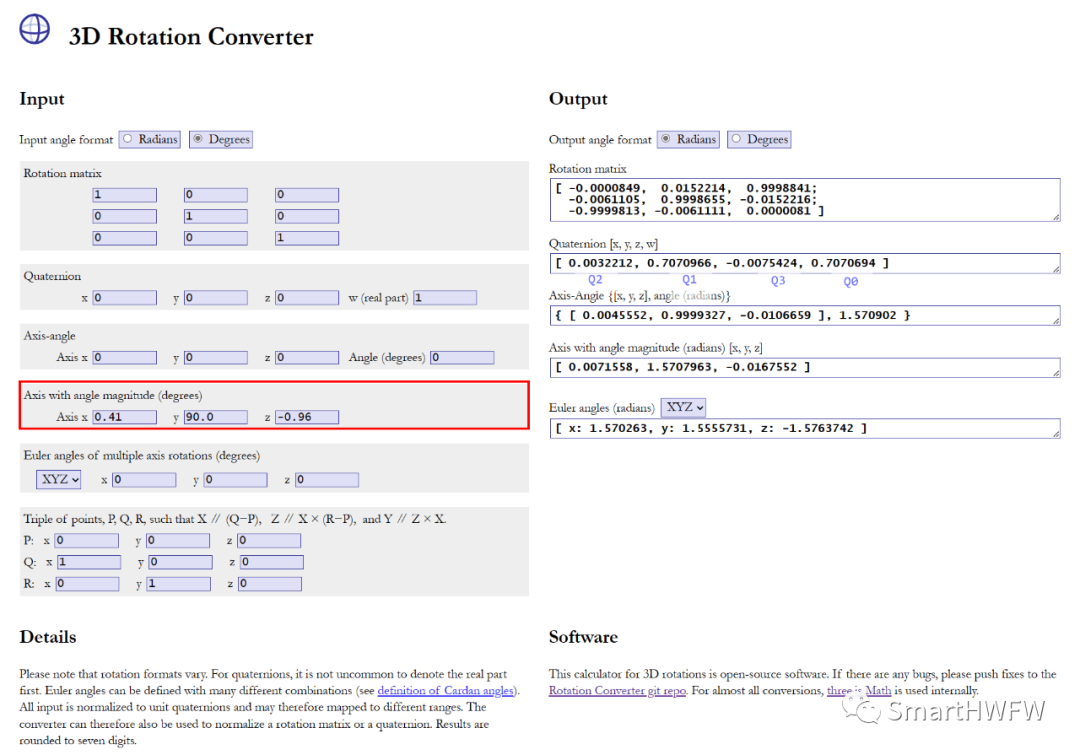
3 3D Rotation Converter
网址链接:https://www.andre-gaschler.com/rotationconverter/
这个在线转换器之前推荐过,是麻省理工学院开发的一个开源的,简单的 HTML+JavaScript 页面,用于在不同的 3D 旋转格式、四元数、罗德里格斯角、欧拉角等之间进行转换。
特别注意一下,四元数的实例按照(x、y、z、w)相应的顺序排列
Quaternion( x :Float, y :Float, z :Float, w :Float)
x- x coordinatey- y coordinatez- z coordinatew- w coordinate
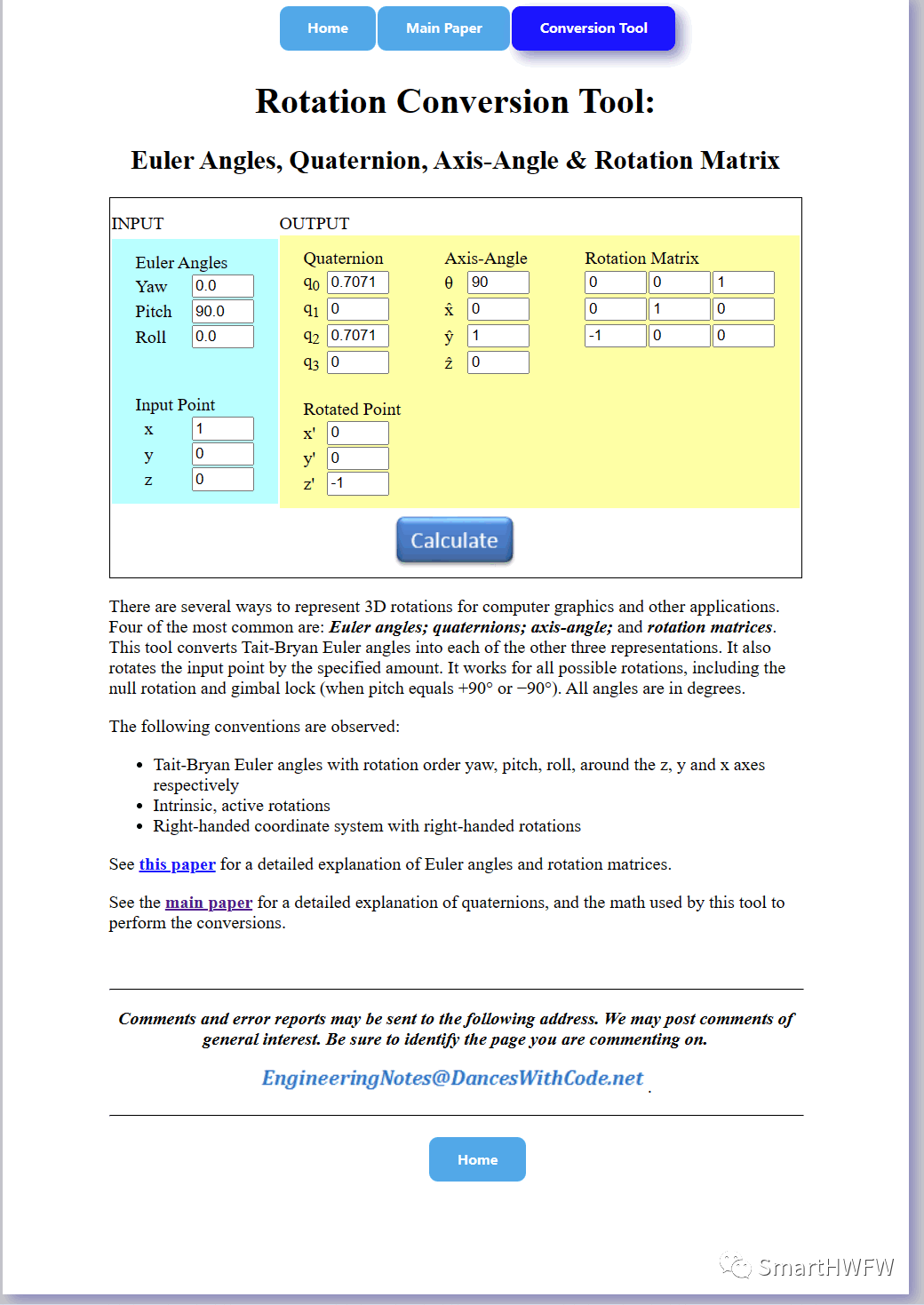
4 Rotation Conversion Tool
网址链接:https://danceswithcode.net/engineeringnotes/quaternions/conversion_tool.html
这个网站界面清晰简单,比较直观。作者是执业的航空航天工程师,将他自己职业生涯遇到的数学技能记录成笔记,很有特点。我更加喜欢它的笔记。
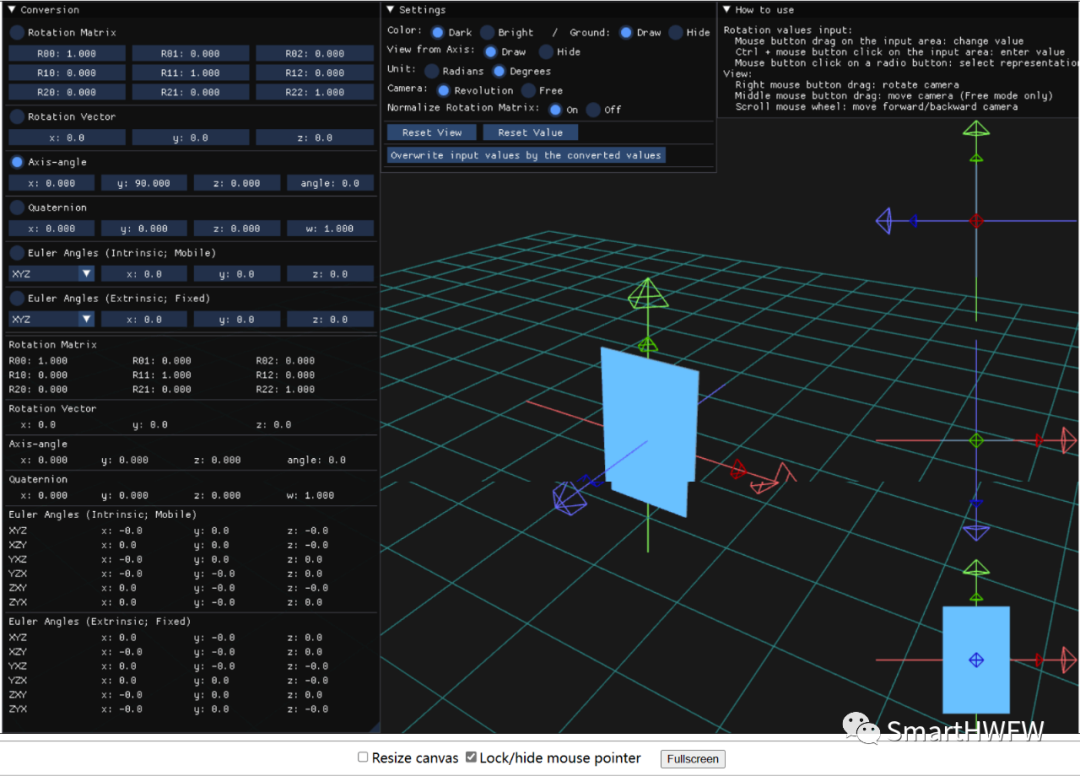
5Rotation master
网站链接:https://iwatake2222.github.io/rotation_master/rotation_master.html
它是一个开源的项目,作者提供了Ubuntu/Window/MacOS版本的可执行文件。能对刚体旋转的不同表示进行相互转换并显示。提供了 旋转矩阵、旋转矢量、轴角、四元数、欧拉角三维旋转的表示方法之间的转换,并对该旋转进行可视化。
责任编辑:彭菁
-
数据
+关注
关注
8文章
7134浏览量
89487 -
可视化
+关注
关注
1文章
1200浏览量
21025 -
IMU
+关注
关注
6文章
319浏览量
45871
原文标题:【3D 旋转工具】IMU 四元数&欧拉角在线可视化软件
文章出处:【微信号:SmartHWFW,微信公众号:SmartHWFW】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
七款经久不衰的数据可视化工具!
从使用效果来看,数据可视化工具离不开数据中台吗?
能做数据治理的数据可视化工具,又快又灵活
现在做企业级数据分析,离不开秒分析的数据可视化工具
这样选数据可视化工具,更能选到适用的
SpeedBI数据可视化工具:浏览器上做分析
紧跟老板思维,这款数据可视化工具神了
mongodb可视化工具如何使用_介绍一款好用 mongodb 可视化工具
推荐几款数据可视化工具,让设计变得不再难
建议收藏的20款实用的数据可视化工具
数据可视化工具的图表主要分为哪些
一键生成可视化图表/大屏 这13款数据可视化工具很强大
贼拉好用的一个嵌入式数据可视化工具






 工商网监
工商网监
评论