 软着陆技术在半导体和3C组装设备中的应用
软着陆技术在半导体和3C组装设备中的应用
软着陆技术在半导体和3C的组装设备中被广泛的应用。
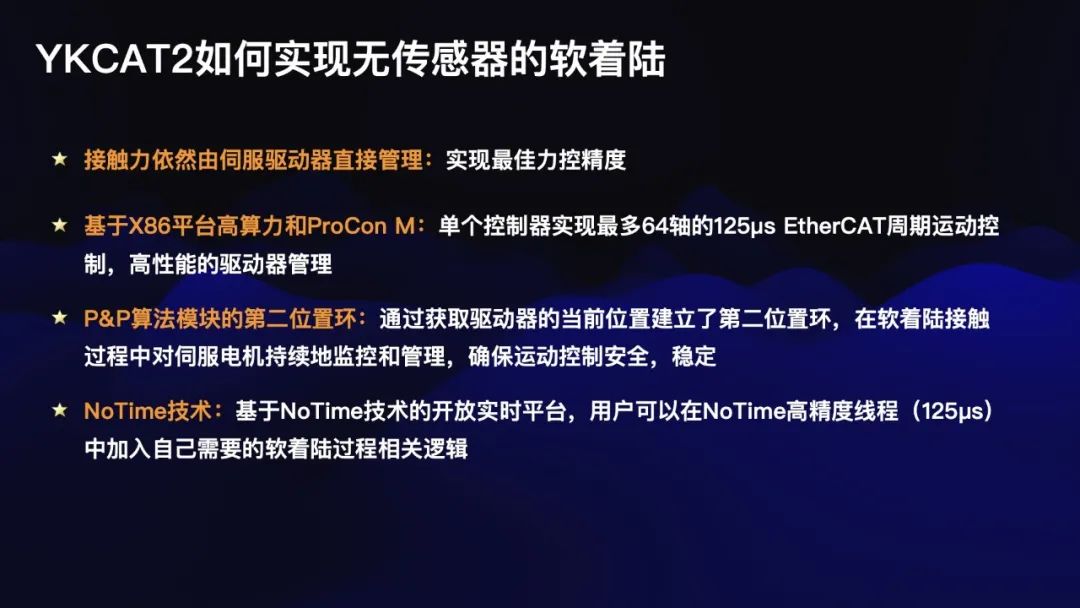
目前常见的软着路一般通过特定的驱控实现,这是一种比较直接的实现方式,特定的软着陆逻辑运行在伺服中,因为伺服驱动器直接管理着电流和速度环,理论上可以实现最高性能的软着陆应用。
然而,不同的设备往往需要特定的软着陆逻辑,甚至需要关联其他的信号和逻辑。
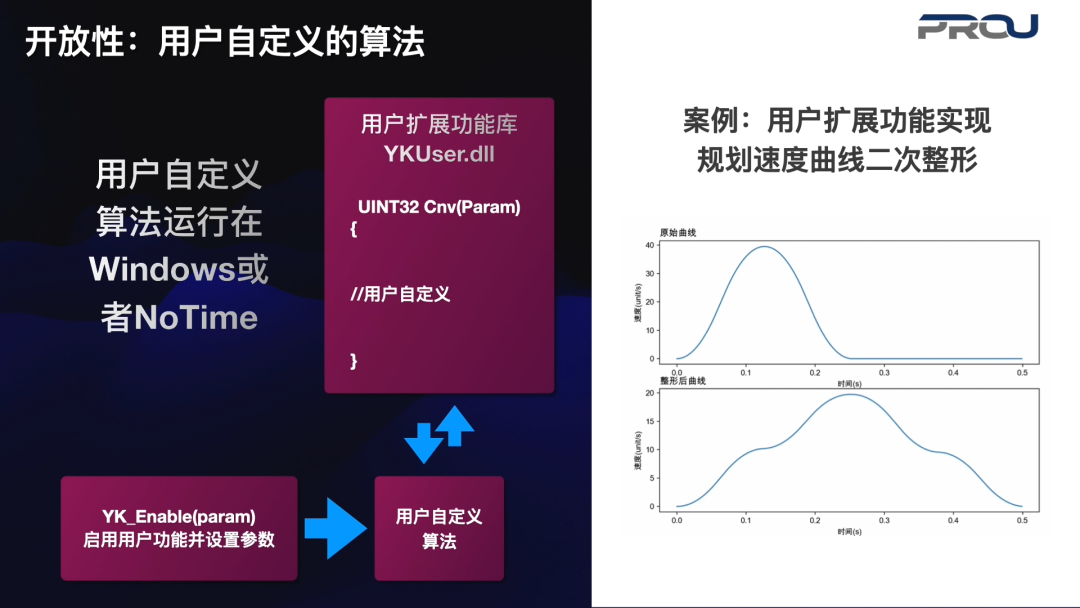
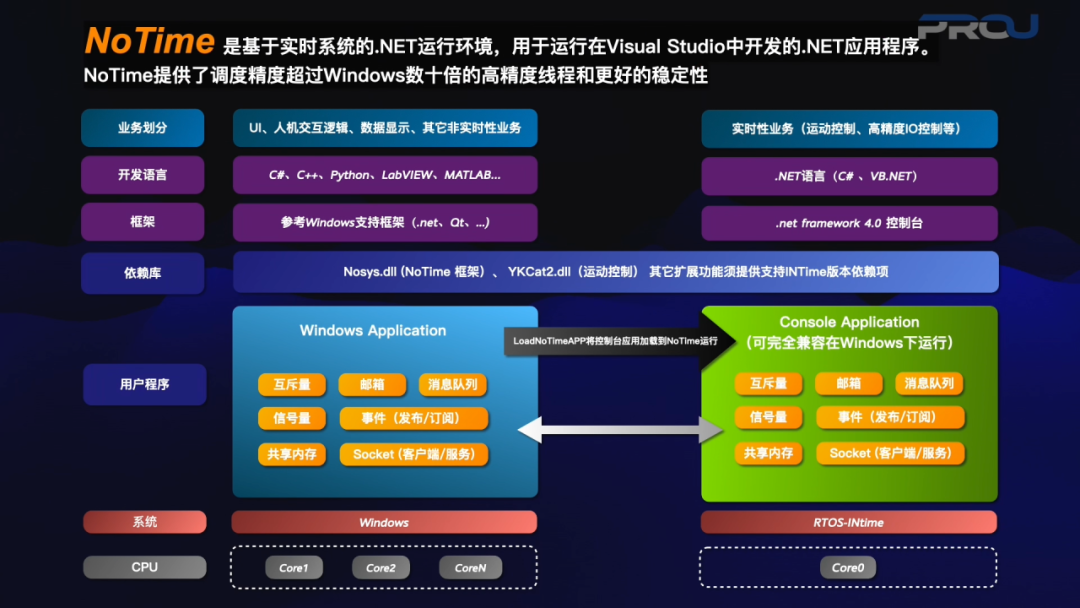
ProCon P&P模块的软着陆功能,通过与伺服驱动器的高性能交互,以及NoTime技术,实现了高性能且用户可以自定义逻辑的柔性软着陆应用。
场景一
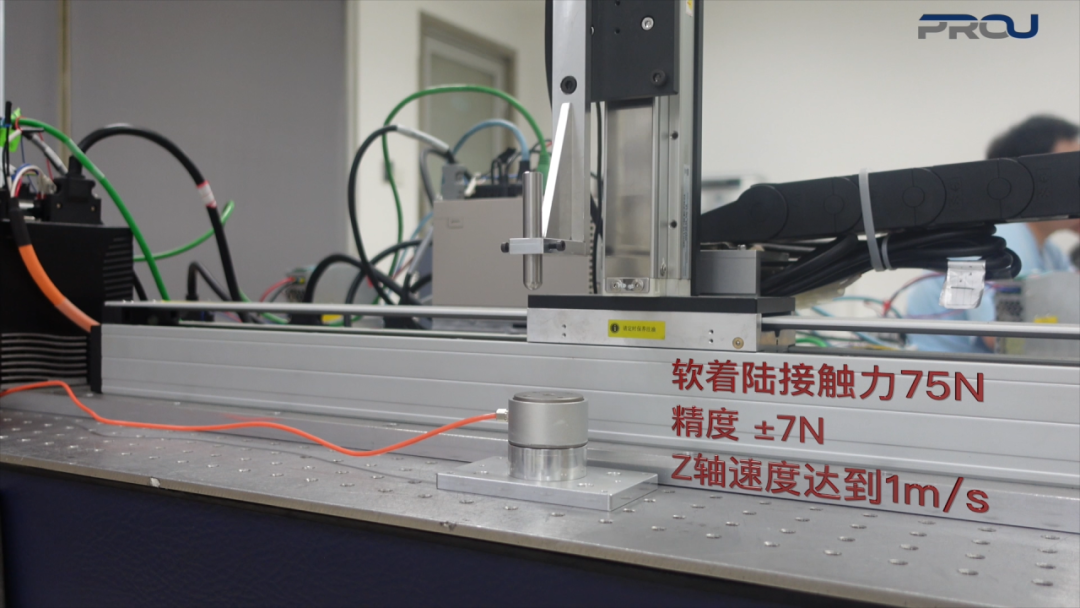
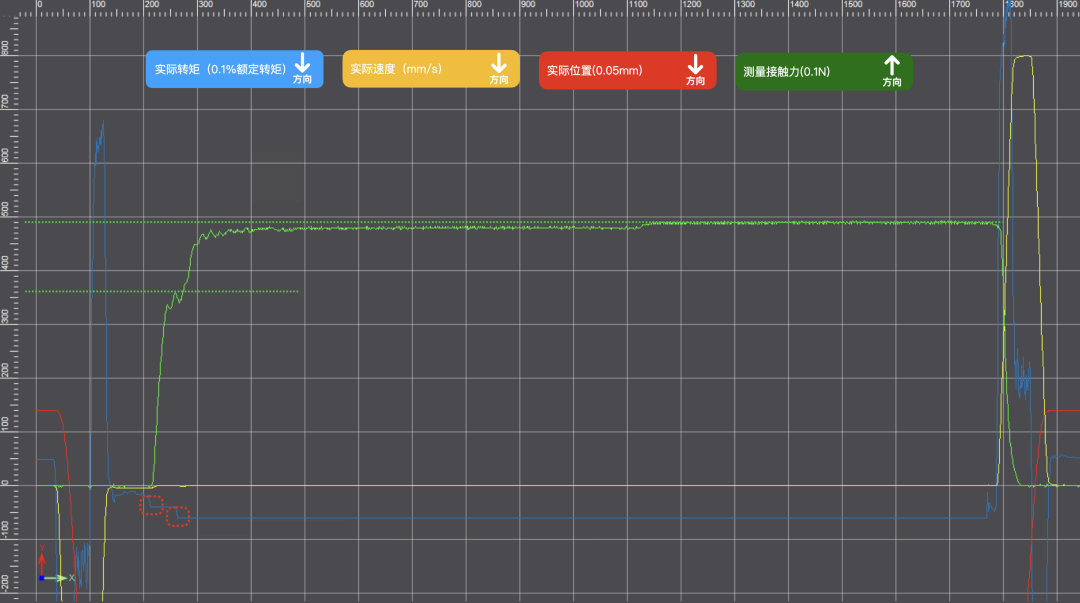
这是一个半导体或3C装备的组装场景,要求软着陆的接触力为75N,精度为±10%,Z轴最高速度达到1m/s。
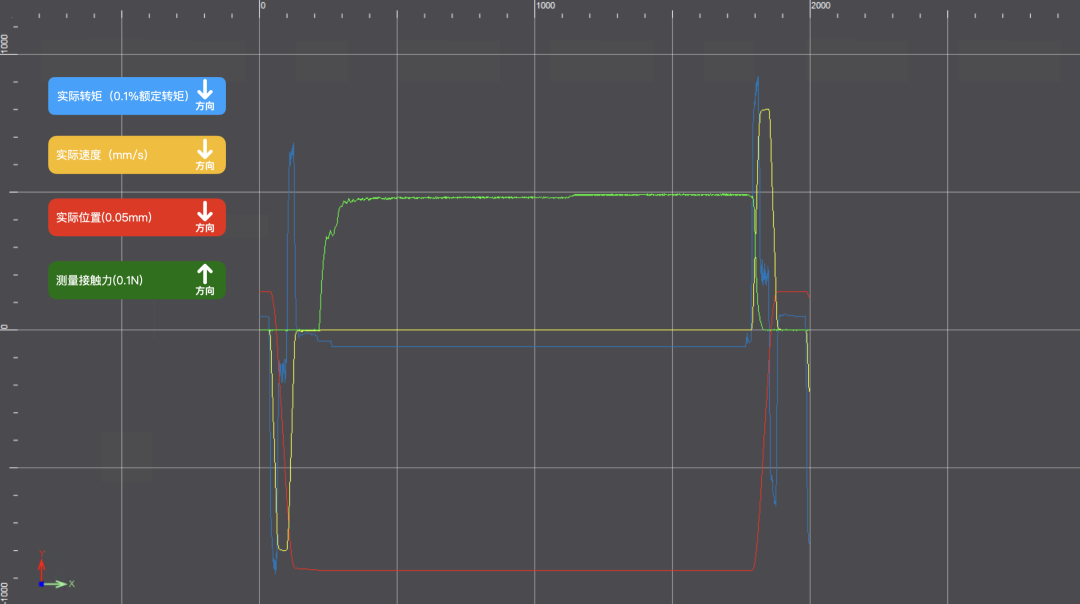
通过ProEN的示波器功能,我们分析图中Z轴伺服的实际转矩,实际速度,实际位置以及外置用于测试的传感器的数据。
Z轴的起始位置为+7mm,由于软着陆运动是往下运动,也就是负方向运动,所以看到着陆的过程中,包括实际转矩,实际速度,实际位置的曲线都是朝负方向变化。
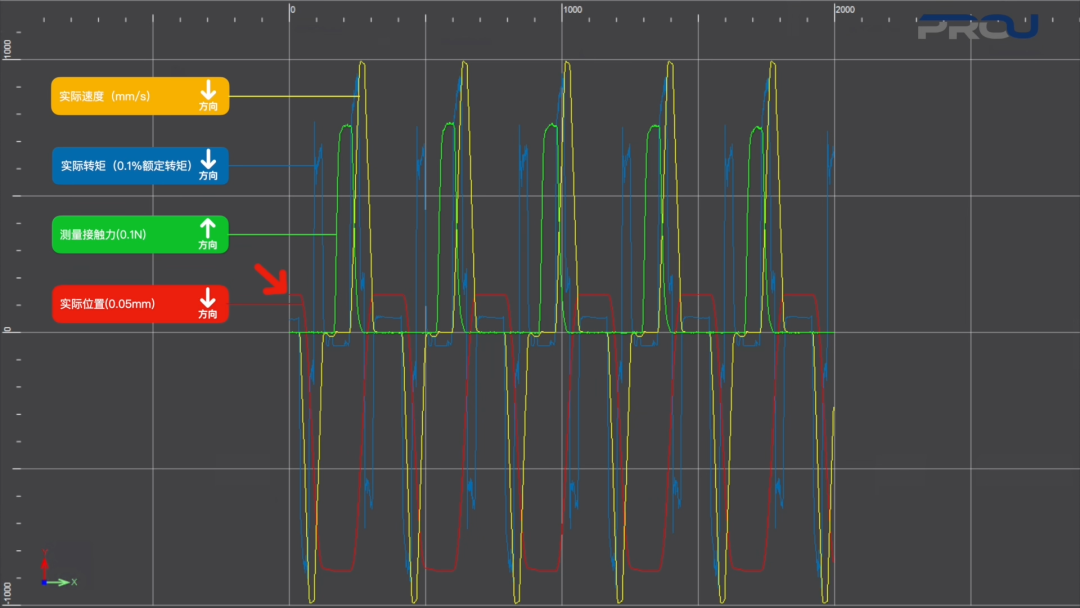
只有绿色的力传感器的曲线是正向的,传感器只测量,并不参与控制。分析传感器采集的数据,可以看到力控精度可以控制在±1N。
与传统专用软着陆装置不同,用户使用YKCAT2可以方便地加入设备需要的特定逻辑或算法。
场景二
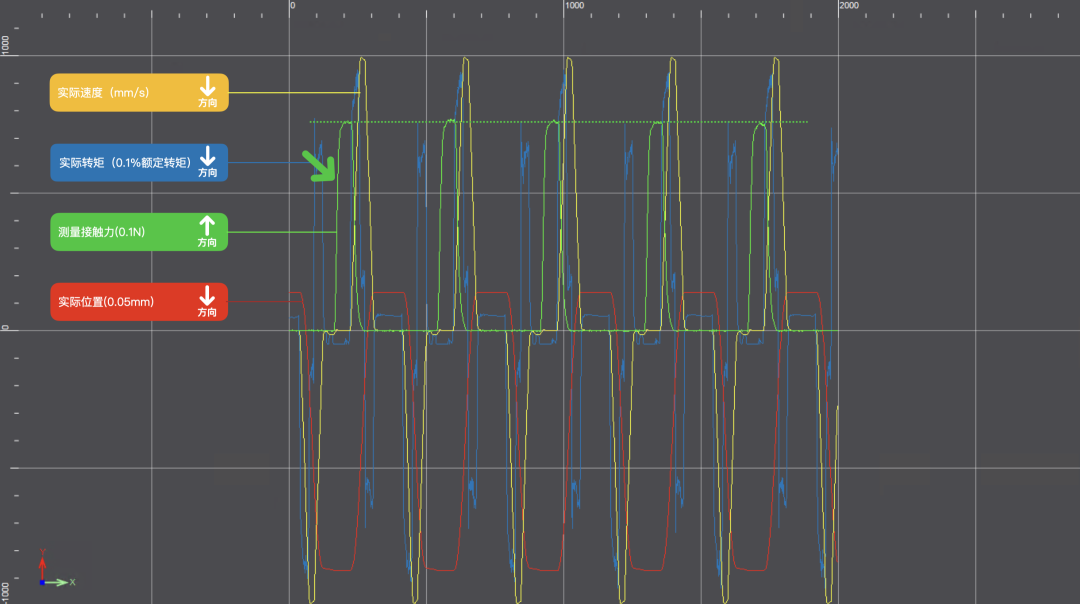
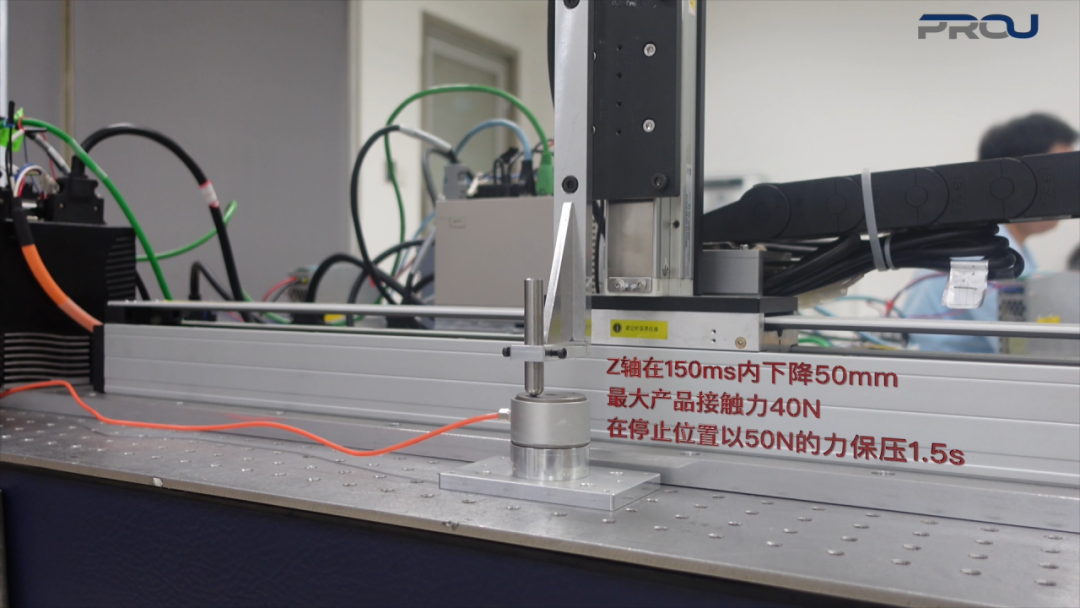
在这个场景中,Z轴在150ms内下降50mm,最大产品接触力40N。之后在停止位置以50N的力保压1.5s,如视频:
放大其中一个周期,第一个红色框内实际转矩曲线开始直线下降时,意味着此时轴接触了产品,软着陆完成。对照测量曲线,接触力为33~37N(传感器和模拟量模块有一定的滞后)。
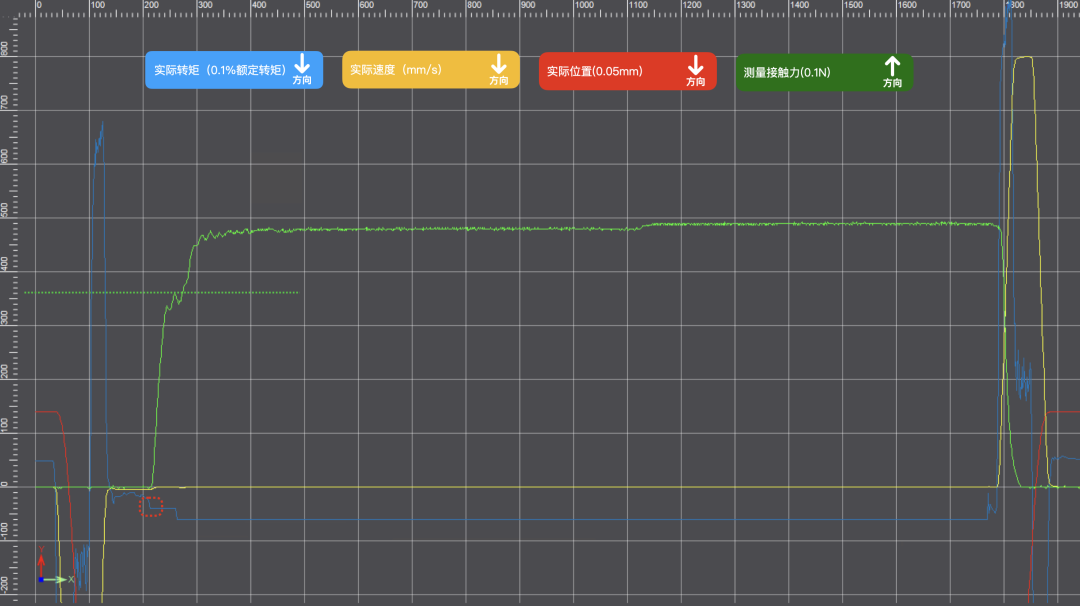
第二个红色框为Z轴输出保压力,从绿色传感器曲线可以看到保压力值为50N,保压时间为1.5s。
通过NoTime 125μs高精度线程,用户设定的逻辑/算法在实时系统中实时被执行,实现自定义的力控应用。
通过这两个场景,我们可以了解YKCAT2软着陆是如何实现的:
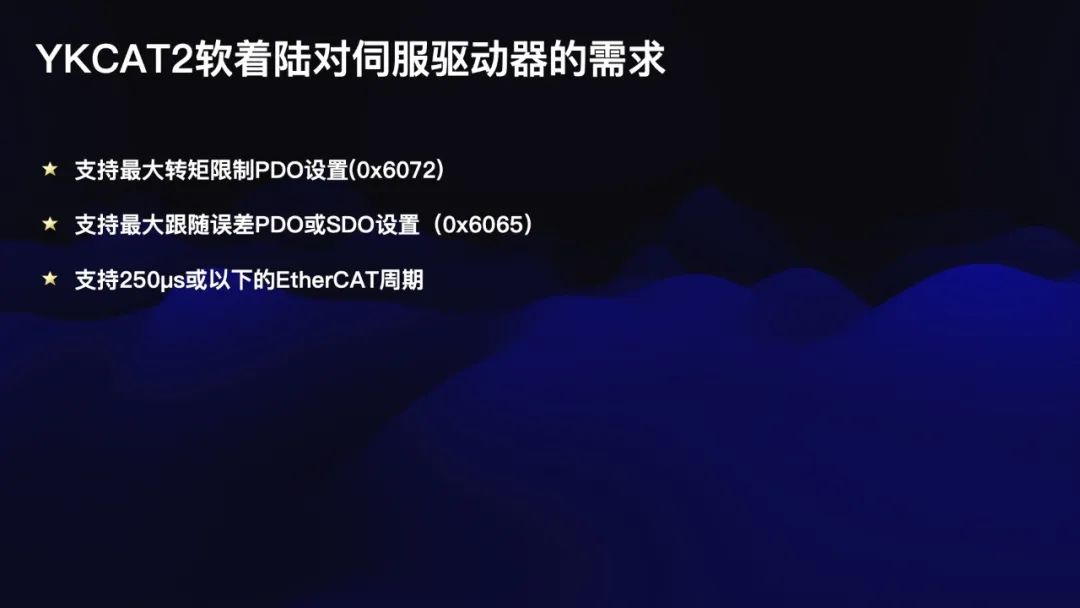
最后,伺服驱动器满足以下技术点即可适配YKCAT HP&P模块的软着陆功能:
以上就是软着陆的全部介绍内容了。
编辑:黄飞
-
传感器
+关注
关注
2553文章
51513浏览量
757294 -
示波器
+关注
关注
113文章
6304浏览量
186043 -
模拟量
+关注
关注
5文章
501浏览量
25694 -
伺服驱动器
+关注
关注
22文章
490浏览量
31851
原文标题:ProCon HP&P模块,实现柔性的“软着陆”应用
文章出处:【微信号:伺服与运动控制,微信公众号:伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
全球半导体产值再创新高,AOI设备需求热度有望保持
2019上海国际3C电子制造及技术装备展览会
汇聚-2019中国上海国际3C电子制造及技术装备展览会
2019中国(北京)国际3C电子制造及技术设备展览会
超声波传感应用于无人机着陆技术解析
信息技术设备产品如何办理3C认证
基于月球探测器的重力转弯软着陆最优制导研究






 工商网监
工商网监
评论