 全国产EtherCAT运动控制边缘控制器-ZMC432H
全国产EtherCAT运动控制边缘控制器-ZMC432H
引言
EtherCAT运动控制边缘控制器是工业互联网的关键组件之一,结合丰富的运动控制功能、实时数据采集、处理和本地计算等,具备高度灵活的可编程性和出色的运动控制性能,为运动控制协同工业互联网应用带来巨大市场潜力,同时也使其成为企业实现智能制造并高效稳定生产的核心控制部件。
一、ZMC432H产品概述
正运动技术ZMC432H
全国产EtherCAT运动控制边缘控制器ZMC432H是正运动的一款软硬件全国产自主可控,运动控制接口兼容EtherCAT总线和脉冲型的独立式运动控制器,最多支持32轴运动控制,同时支持正运动远程显示功能,能提供网络组态显示,可实时监控和调整参数配置。
ZMC432H具备丰富的硬件接口和控制功能模块,能实现高效稳定的运动控制和实时数据采集,以满足工业控制协同工业互联网的应用需求。
二、ZMC432H产品特性
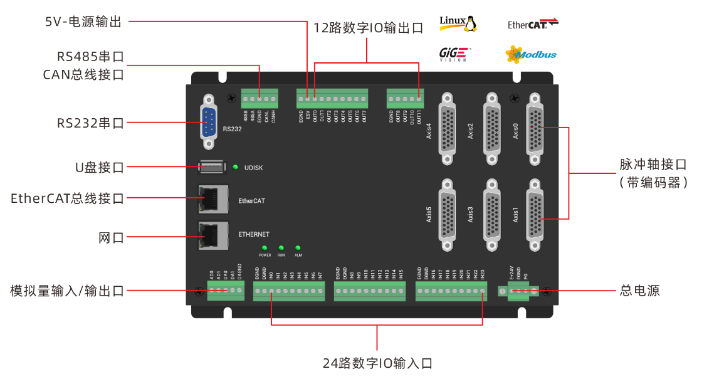
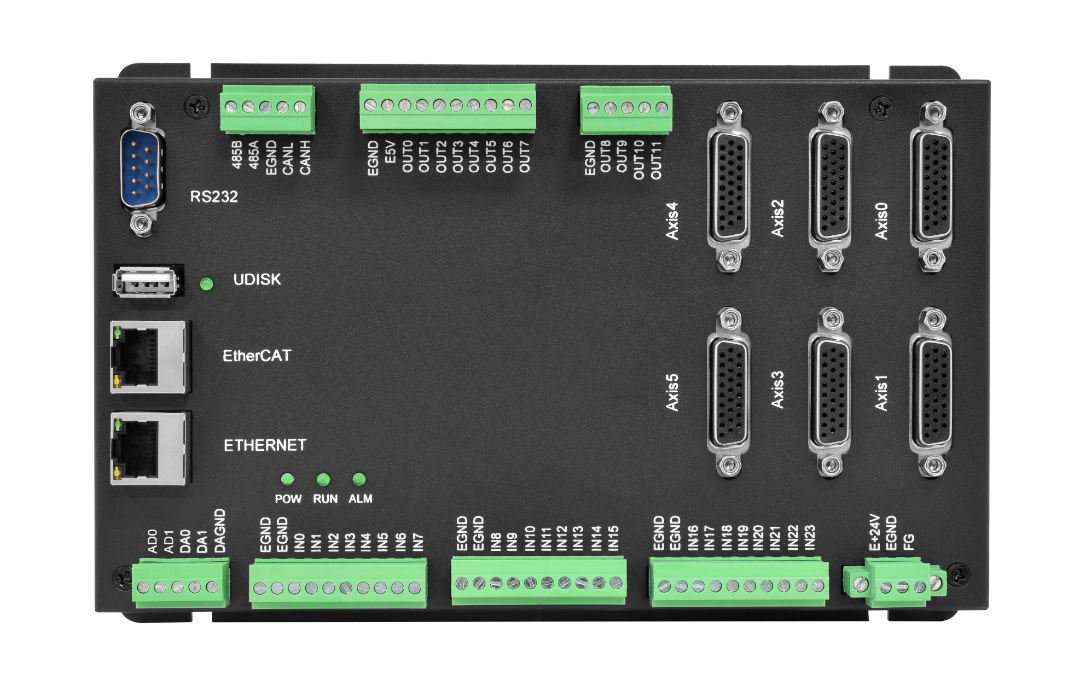
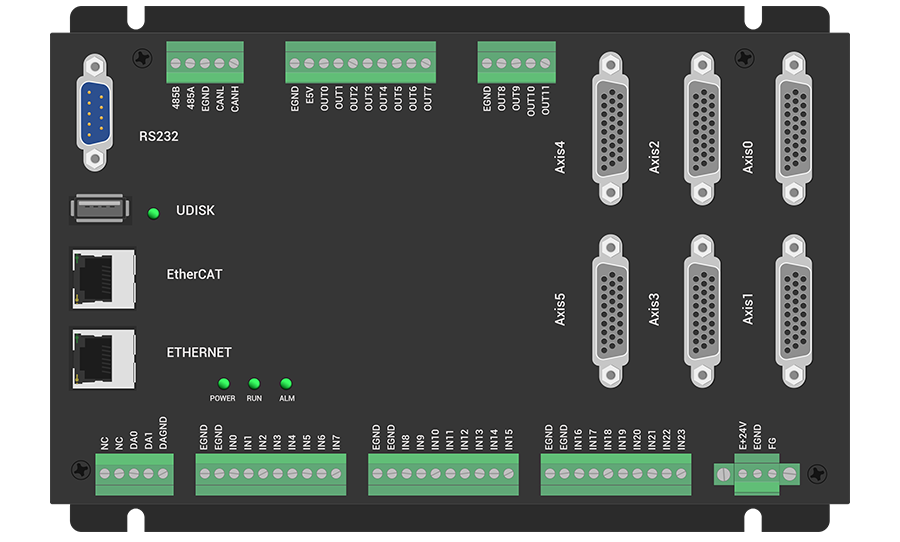
ZMC432H硬件接口
●24路通用输入和12路通用输出,其中包括4路高速输入和4路高速输出;
●2路模拟量输入(AD),2个模拟量输出(DA),可读取和输出模拟信号,用于监测和控制各种物理量和过程变量;
●6路10MHz脉冲输出和编码器轴接口,支持精准的运动控制和实时位置反馈;
●内置多项实时性运动控制功能,例如视觉飞拍、多维PSO、高速位置锁存,多轴同步运行等;
●丰富通讯接口,可用于与外部设备进行数据交互和信号控制,实现灵活的系统集成和协同操作;
●通过ZCAN和EtherCAT扩展模块进行IO硬件资源扩展,可扩展至4096个隔离输入口和4096个隔离输出口;
●掉电检测、掉电存储,多种程序加密方式,能够有效防止系统故障,保护项目工程文件数据,并提高系统的可靠性;
●可定制ZMC432HT版本,运行温度区域拓宽至-40°C~70°C,适应自动化设备在极端环境下的应用需求。
三、ZMC432H一站式解决方案
ZMC432H为智能制造的工业互联网用户提供一站式解决方案,实现生产设备之间的互联互通,全面共享和交互内部数据,从而优化生产流程,更好地应对市场需求的变化。
方案涵盖通用的运动控制引擎和实时内核MotionRT,用户可通过PC端的IDE编程环境RTSys,在单个硬件平台上实现应用程序的可移植性和集中控制,从而降低成本,提高系统可靠性和安全性。
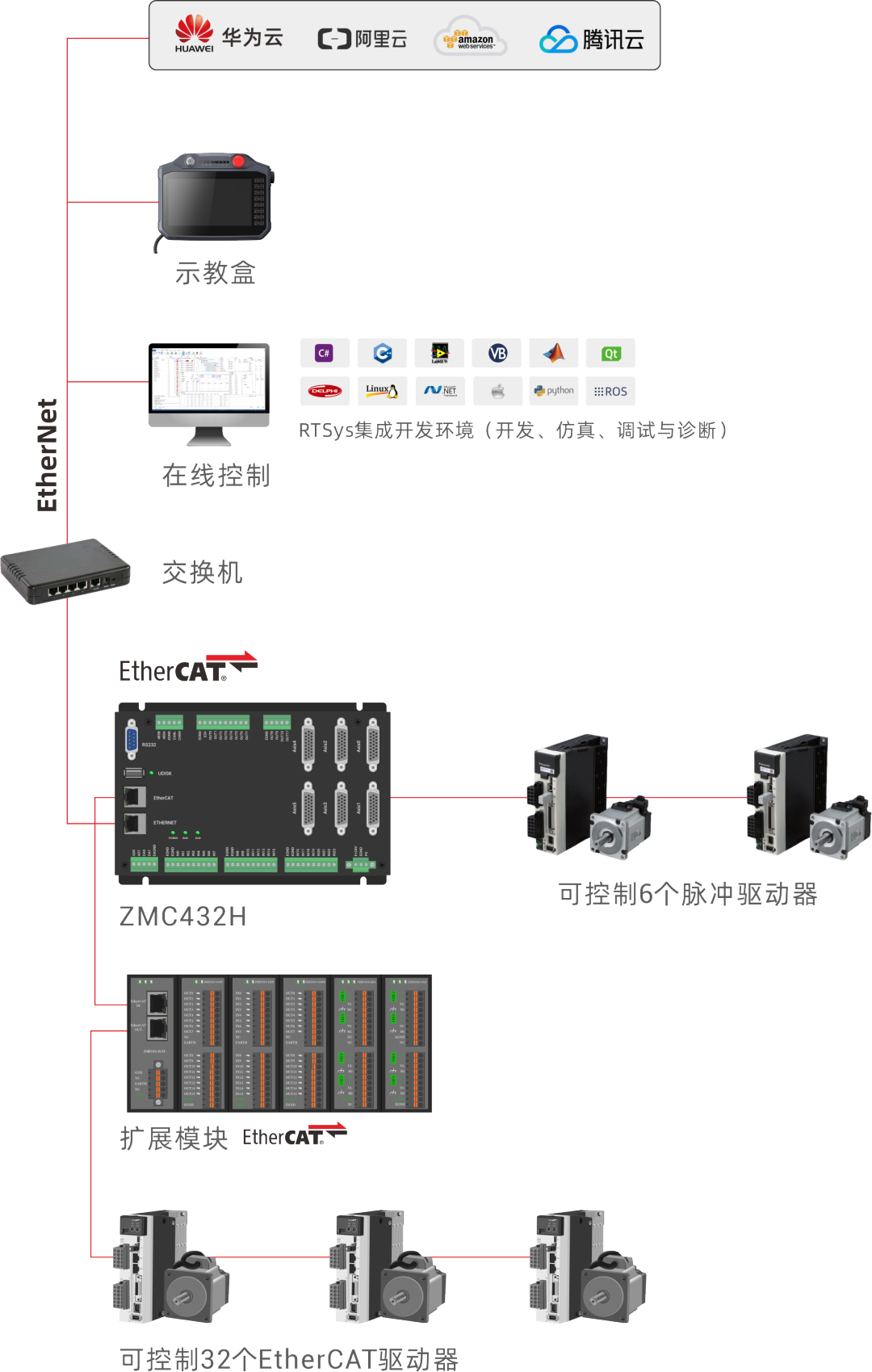
ZMC432H应用方案
●32轴EtherCAT总线控制,刷新周期1ms;
●6路10MHz高速差分脉冲输出,总线轴、脉冲轴可混合插补;
●控制器自带I/0,模拟量输入和输出;
●EtherNET网口对接MES、云平台;
●可配置Linux系统,实现工艺开发的差异化;
●硬件核心器件全国产,运动控制核心runtime软件MotionRT正运动技术自主自研,PC端IDE RTSys正运动技术自主自研持续改进。
四、ZMC432H内置软件
RTSys是正运动技术推出的一款集成机器视觉+运动控制功能的一站式绿色免安装开发软件,全国产自主工业软件IDE开发环境。
支持RTBasic、RTPLC梯形图、 RTHMI组态和机器视觉RTVision等二次开发,并可混合编程,实时仿真、在线跟踪以及诊断与调试,快速帮助客户与用户实现智能装备的视觉定位、测量、识别、检测和复杂的运动控制等系统的开发。

五、ZMC432H市场应用
全国产EtherCAT运动控制边缘控制器-ZMC432H适用于机器人、电子半导体设备、点胶设备、非标设备、印刷包装设备、锂电新能源设备、医疗设备、流水线等场合应用。
选择全国产EtherCAT运动控制边缘控制器-ZMC432H,将为您的生产设备带来卓越的互联互通体验,加强设备之间的数据共享和交互,从而提升您的生产效率和业务竞争力。联系我们,了解更多关于ZMC432H的产品信息。
审核编辑 黄宇
-
控制器
+关注
关注
112文章
16185浏览量
177335 -
运动控制
+关注
关注
4文章
564浏览量
32821 -
ethercat
+关注
关注
18文章
652浏览量
38591 -
正运动技术
+关注
关注
0文章
97浏览量
317
发布评论请先 登录
相关推荐
脉冲全闭环EtherCAT运动控制器的固件升级

EtherCAT运动控制器与PLC的区别
什么是EtherCAT运动控制器?它有哪些特点?

ZMC900E控制器之ROS2环境安装指南

多轴高性能EtherCAT总线运动控制器ZMC408CE硬件介绍

EtherCAT运动控制器在LabVIEW中的运动控制与实时数据采集



ZMC900E 国产EtherCAT主站控制器 — 电源口传导骚扰整改
凌华科技基于软件控制的EtherCAT运动控制器






 工商网监
工商网监
评论