 pwm的工作原理及用途 简述pwm的工作原理
pwm的工作原理及用途 简述pwm的工作原理
1
PWM是什么
脉宽调制(Pulse Width Modulation)是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。PWM控制在汽车上也有较多应用,比如:电动汽车充电电路CP端子信号(功率握手用),燃油泵功率控制电路、电机调速。
2
模拟电路&数字电路
【1】模拟电路
模拟信号的值可以连续变化,其时间和幅度的分辨率都没有限制。9V电池就是一种模拟器件,因为它的输出电压并不精确地等于9V,而是随时间发生变化,并可取任何实数值。
模拟电压和电流可直接用来进行控制,如对汽车收音机的音量进行控制。在简单的模拟收音机中,音量旋钮被连接到一个可变电阻。拧动旋钮时,电阻值变大或变小;流经这个电阻的电流也随之增加或减少,从而改变了驱动扬声器的电流值,使音量相应变大或变小。
尽管模拟控制看起来可能直观而简单,但它并不总是非常经济或可行的。其中一点就是,模拟电路容易随时间漂移,因而难以调节。模拟电路还有可能严重发热,其功耗相对于工作元件两端电压与电流的乘积成正比。模拟电路还可能对噪声很敏感,任何扰动或噪声都肯定会改变电流值的大小。
【2】数字电路
通过以数字方式控制模拟电路,可以大幅度降低系统的成本和功耗。此外,许多微控制器和DSP已经在芯片上包含了PWM控制器,这使数字控制的实现变得更加容易了。 简而言之,PWM是一种对模拟信号电平进行数字编码的方法。
PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。只要带宽足够,任何模拟值都可以使用PWM进行编码(这里指的是PWM直接控制负责)。
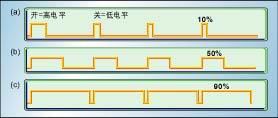
上图显示了三种不同的PWM信号。a是一个占空比为10%的PWM输出,即在信号周期中,10%的时间通,其余90%的时间断。b和c显示的分别是占空比为50%和90%的PWM输出。这三种PWM输出编码的分别是强度为满度值的10%、50%和90%的三种不同模拟信号值。例如,假设供电电源为9V,占空比为10%,则对应的是一个幅度为0.9V的模拟信号。

3
通讯与控制
PWM 的一个优点是从处理器到被控系统信号都是数字形式的,无需进行数模转换。让信号保持为数字形式可将噪声影响降到最小。噪声只有在强到足以将逻辑1 改变为逻辑0 或将逻辑0 改变为逻辑1 时,也才能对数字信号产生影响。对噪声抵抗能力的增强是PWM 相对于模拟控制的另外一个优点,而且这也是在某些时候将PWM 用于通信的主要原因。
作为一个具体的例子,我们来考察一种用PWM 控制的制动器。简单地说,制动器是紧夹住某种东西的一种装置。许多制动器使用模拟输入信号来控制夹紧压力(或制动功率)的大小。加在制动器上的电压或电流越大,制动器产生的压力就越大。可以将PWM 控制器的输出连接到电源与制动器之间的一个开关。要产生更大的制动功率,只需通过软件加大PWM 输出的占空比就可以了。如果要产生一个特定大小的制动压力,需要通过测量来确定占空比和压力之间的数学关系(所得的公式或查找表经过变换可用于控制温度、表面磨损等等)。
4
硬件设置产生PWM
许多微控制器内部都包含有PWM 控制器。例如,Microchip 公司的PIC16C67 内含两个PWM 控制器,每一个都可以选择接通时间和周期。占空比是接通时间与周期之比;调制频率为周期的倒数。执行PWM 操作之前,这种微处理器要求在软件中完成以下工作:
- 设置提供调制方波的片上定时器/计数器的周期
- 在PWM 控制寄存器中设置接通时间
- 设置PWM 输出的方向,这个输出是一个通用I/O 管脚
- 启动定时器
- 使能PWM 控制器
5
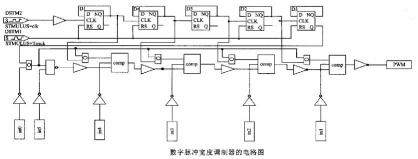
软件编程产生PWM
51单片机内部没有PWM控制器,需要通过软件编程来实现,程序如下。
K1 EQU P1.0
K2 EQU P1.1
ORG 0000H
AJMP MAIN
ORG 0040H
MAIN:
MOV SP,#60H
MOV R1,#3
MOV R2,#4
MOV R3,#0
MOV TH0,#0FFH
MOV TL0,#9CH
MOV TH1,#3CH
MOV TL1,#0B0H
MOV TMOD,#11H;16位定时器/计数器
MOV IE,#8FH
SETB IT0
SETB IT1
SETB TR0
SETB TR1
LOOP:
MOV A,R1
JB K2,S1
CALL DELAY
JB K2,S1
CJNE A,#9,PWMINC
CALL LED
SJMP LOOP
PWMINC:
INC R1
SJMP LOOP
S1:
JB K1,S2
CALL DELAY
JB K1,S2
CJNE A,#1,PWMDEC
CALL LED
SJMP LOOP
PWMDEC:
DEC R1
S2: SJMP LOOP
ORG 000BH
AJMP TIME0
ORG 0100H
TIME0:
MOV A,#9
SUBB A,R2
JNC DONE
INC R2
SJMP LOOP1
DONE: MOV R2,#1
LOOP1: CLR C
MOV A,R2
SUBB A,R1
JNC LOOP2
SETB P1.6
SJMP OUT1
LOOP2: CLR P1.6
OUT1: RETI
ORG 0003H
LJMP IN0
ORG 1000H
IN0:
INC R3
RETI
LED:
CPL P1.2
RET
DELAY:
MOV R7,#100
DE: MOV R6,#100
DJNZ R6,$
DJNZ R7,DE
RET
END
-
电动汽车
+关注
关注
156文章
12075浏览量
231184 -
模拟电路
+关注
关注
125文章
1556浏览量
102726 -
微处理器
+关注
关注
11文章
2261浏览量
82422 -
PWM控制器
+关注
关注
18文章
470浏览量
36090 -
脉宽调制器
+关注
关注
1文章
57浏览量
17004
发布评论请先 登录
相关推荐
PWM控制电路的基本构成及工作原理

pwm的工作原理






 工商网监
工商网监
评论