 用于工业自主移动机器人的完整解决方案
用于工业自主移动机器人的完整解决方案
创造新时代
赋予机器人对于环境的感知与移动能力,使得机器人能够更安全、更具机动性,若再结合人工智能(Artificial Intelligence, AI)技术,将能使机器人更聪明、更具实用性,使得机器人的未来发展极具想象空间。本文将为您探讨机器人感知与AI技术的发展,以及众多厂商所推出的相关解决方案。
通过传感器使机器人能够感知世界
机器人感知技术使机器人能够“看到”、“听到”这个世界,通过AI技术,则可使机器人对于所感知的环境,做出相对应的举动,机器人感知对于机器人在现实环境中做出决策、计划和操作至关重要,其中的相关应用都会涉及到感官数据和人工智能/机器学习(AI/ML)技术。此类应用的示例包括障碍物检测、对象检测与识别、3D环境表示、手势和语音识别、场景理解、道路检测、车辆检测、行人检测、目标跟踪、人体检测、环境变化检测、活动识别、语义位置分类、对象建模等。
如今,大多数机器人感知系统都使用机器学习(ML)技术,从经典方法到深度学习方法。无论考虑哪种ML方法,来自传感器的数据都是机器人感知的关键要素。数据可以来自单个或多个传感器,通常安装在机器人上,但也可以来自基础设施或另一个机器人(例如,安装在附近飞行的无人机上的摄像头)。
为了对移动机器人进行安全和全面的导航控制,需要部署多套传感器技术,包括视觉(ToF)、雷达无线链路、惯性测量单元(IMU)形式的完整定位、陀螺仪及其所有相关应用程序、软件和固件。
机器人的传感器提供的信息可用于推断有关世界、机器人,以及机器人在世界中位置的信息。传感器可以提供简单的信息(例如,吸尘机器人上的简单碰撞传感器)或丰富、高度复杂的数据(例如,RGB-D相机,它提供彩色图像,以及每个像素的深度估计)。在理想情况下,传感过程可以使用物理定律(例如,光如何从物体表面反射)或有时使用简单的几何学(例如,立体视觉依赖于使用简单的三角测量来确定到物体的距离)来建模。
提供机器人开发的完整解决方案
机器人的感知功能主要应用于定位和导航,由于环境不同,所使用的传感器也不同。像是在室内的场景下,大多数室内用机器人面对的地面大多是规则且平坦的,但是对于户外用机器人来说,地形往往很不规则,此外,户外用机器人也必须应对天气条件,以及光强和光谱的变化。因此,所需使用的传感器也将有所不同。
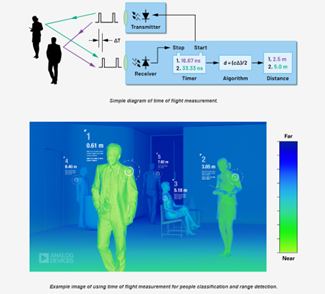
要让机器人能够“看到”东西,便不得不提3D飞行时间(ToF)技术。3D ToF是一种无扫描仪LIDAR(光检测和测距)技术,通过发射纳秒级的高功率光脉冲来捕获相关场景的深度信息(通常是短距离内)。
ADI公司在3D ToF技术上已经投入多年,可提供直接实现和提升先进ToF系统和摄像头功能的行业领先产品和解决方案,包括高分辨率CMOS成像芯片(100万像素)、深度计算和处理、激光驱动器、电源管理,以及开发工具和软件/固件,帮助快速实现ToF解决方案。
ADI的3D ToF产品相当完整,包括ADSD3100这款1 MP CMOS,支持ToF的背光传感器;ADDI9036则是带可编程时序和V驱动器的CCD TOF信号处理器。此外,ADI还提供3D ToF开发平台,这款模块化的ToF解决方案基于行业标准的96Boards平台构建而成,可测量对象的X、Y、Z轴数据。ADI公司的原型制作3D ToF平台可用于软件和算法开发,利用该平台进行硬件设计,可加快工业、汽车领域的产品设计评估和实施。
ADI还推出AD-FXTOF1-EBZ这款3D ToF开发套件,这是一种景深测量解决方案,非常适合开发3D计算机视觉系统。它使用VGA CCD,支持以每秒30帧捕获640x480景深映射场景,进而提供比市场上许多其他TOF系统高4倍的分辨率。ADI另一款AD-3DSMARTCAM1-PRZ则是一种具有AI边缘处理能力的2D和3D机器视觉解决方案,它可以用于实现不同工业细分市场中的先进机器视觉应用,包括物流、机器人、农业和人员活动监控。
协作机器人与人共存并协同工作
以往在工厂中的机器人都是独立运作,工人必须与机器人保持安全距离,以免发生碰撞造成伤害。不过,通过机器人感知与AI技术快速发展,机器人变得越来越聪明,智能机器和系统已经能够自主地运作,包括以前依赖人力的工作领域。不过,即使在机器人技术高度发达的今天,装配和检查过程中仍然需要依靠人力进行工作,因此需要使用协作机器人,来与人共存并协同工作。
Murata针对机器人设计领域拥有多样化的产品线,包括各式各样的传感器,像是陀螺仪、加速度计、振动传感器、温度传感器、压电薄膜传感器,可以提供满足机器人设计所需的各种零部件。
以Murata的振动传感器为例,可用于机器设备的预测性维护,利用陶瓷传感器特有的宽检测频带的特性,可以检测旋转设备振动的微小差异。监测振动数据的这些变化,可以及早检测设备异常情况以进行预测性维护。振动传感器支持宽频率范围和Z方向传感,带驱动电路,支持差分输出以降低噪声,支持温度传感,尺寸仅有5.0 x 5.0 x t3.5 mm,在结构上具有7个端子,采用SMD封装,集成加速度传感器与热敏电阻。
Murata的UWB(超宽带)连接模块也可应用于机器人产品,采用UWB技术可适用于安全和精确的距离测量,适用于室内位置跟踪和访问控制等应用。目前有Type 2BP与Type 2AB两种型号。
Type 2BP采用NXP Trimension SR150芯片组,支持UWB 5、9频道,具有SPI接口与支持3个天线(3D AoA或2D AoA支持),具有嵌入参考时钟和睡眠时钟,以及集成BPF(带通滤波器)可用于监管认证,采用树脂外模结合保形屏蔽封装,符合RoHS标准。
Type 2AB采用Quorvo DW3110/3120芯片组,带有集成Nordic IC(nRF52840)的无主机模块,也具有BLE功能,用于唤醒UWB并更新固件,支持USB、UART、SPI、I2C接口,集成3轴传感器以节省电池电量,使用CR2032电池,具有嵌入式参考时钟,采用树脂外模封装,符合RoHS标准。
用于工业自主移动机器人的
完整解决方案
传统的工业用机器人大多只能固定在特定的位置上工作,但随着机器人智能感知与AI技术的发展,机器人开始拥有自主移动的能力,这也使得机器人应用领域从以往的工业领域,朝向商用、家用领域发展。
机器人行业是一个迅速崛起的行业,具有巨大的优势,但也存在许多潜在的陷阱,必须加以规避,才能成功驾驭这个瞬息万变且基本上未开发的领域。其中需要采用的电子零部件相当多样,Rohm也针对机器人应用推出多种相关的解决方案。
像是LiDAR和SLAM技术可使主移动机器人(AMR)和无人机能够有效地在动态工业环境中导航。因此正确选择高功率激光二极管,对于LiDAR/SLAM系统的精确性能至关重要。
Rohm用于AMR和机器人技术的高功率激光二极管解决方案符合现代LiDAR/SLAM的规范和限制。这些解决方案包括RLD90QZW5 905 nm、25 W不可见脉冲激光二极管,发射宽度为70 μm(等效LD的发射宽度为200 μm)。
在电源应用中,Rohm不断创新并领先于竞争对手发布突破性产品和解决方案,从开创性的SiC功率模块和分立器件,到下一代GaN和专有的高效功率技术。
此外,Rohm还有多种可应用于机器人领域的特色产品,包括KX13x加速度计。Rohm的KX132-1211和KX134-1211三轴加速度计,是一款三轴16位加速器,可支持高达±16g (KX132)/±64g (KX134),并集成了一个用户可配置的3级ADP(高级数据路径),它由一个低通滤波器、低通/高通滤波器和RMS计算引擎。其他特性包括2x2x0.9mm LGA 12引脚封装、宽温度范围(-40℃至+105℃)、0.5µA待机电流和0.53-239µA工作电流。
Rohm的光学传感器产品阵容相当丰富,包括高灵敏度、高可靠性光电晶体管、红外发光二极管和透射/反射型光遮断器。另外还有环境光传感器和接近传感器RPR-0521RS,以及传输型光电遮断器、反射型光电传感器、红外发光二极管、光电晶体管、环境光传感器IC。
除了标准类型的电机驱动器之外,Rohm还提供特定于应用的电机驱动器,这些驱动器在一系列电压、电流、引脚配置和封装类型上,具有出色的可靠性和效率,还包括保护电路以进一步提高可靠性和性能。

机器人技术支持工业自动化快速发展
工业自动化需要仰赖传感器、远程控制与机器人技术,结合AI与物联网(IoT)技术将是工业自动化的关键驱动力,可以在互联工厂中持续监控和改进效率和生产力。工业4.0期待工厂能够大量生产更加个性化和差异化的产品,并能够快速改变生产流程,而联机能力是实现这一个目标不可或缺的一部分,其中的关键应用要求包括网状网络、工业级安全标准、增强范围、高性能数据处理、低功耗蓝牙、Thread和Zigbee等通信协议。
在工业4.0应用中,传感器是获取系统信息的重要关键,对系统和流程了解的信息越多,这些系统和流程的运行效率就越高,从而也就越有竞争力。今天的微型、经济高效的无线传感器正在帮助制造商适应工业物联网的新时代。这些采用传感器的系统都有助于做出明智的及时决策,从而优化整个制造供应链,使用蓝牙和其他网状网络技术的传感器由于尺寸小和功率需求低,可以安装在任何地方。
此外,使用世界上最流行的蓝牙无线技术进行准确定位,是当前的新技术。蓝牙测向是基于到达角(AoA)和离开角(AoD)这两个关键概念,利用了天线在接收(AoA)或发射(AoD)射频信号时发生的角度相移,通过在通信链路任一侧使用天线阵列,可以确定相移数据,并据此计算位置。Nordic的nRF5340、nRF52833、nRF52820、nRF52811 SoC是支持蓝牙测向的理想方案。
满足自主移动机器人需求的解决方案
机器视觉是让机器看得见的关键解决方案,其解决方案便是图像传感器。安森美(onsemi)拥有从VGA到45 MP的大多数图像传感器产品,可为机器视觉应用提供合适的传感器。
以AR0234CS图像传感器为例,这是一款1/2.6英寸、2Mp CMOS数字图像传感器,具有1920 (H) x 1200 (V)的有源像素阵列。它采用了全新的创新全局快门像素设计,针对以每秒120帧的全分辨率,可准确快速地捕捉移动场景进行优化,该传感器在低光和明亮场景中都能产生清晰、低噪声的图像。
AMR是一种移动机器人,可以在结构化或非结构化环境中自主移动,无需持续的人工指导或干预。他们配备了传感器和机载计算机,使他们能够感知周围环境并根据这些信息做出决定。AMR可以执行广泛的任务,例如物流、库存管理、质量控制,或参与医疗应用。
AMR可以自主执行质量控制检查,减少人工干预的需要。他们可以使用摄像头、激光雷达和超声波传感器等传感器来检测产品中的缺陷或异常。安森美提供一系列成像传感器、模拟前端(AFE)IC和电源管理IC,可使AMR捕捉高质量图像并执行精确测量。
AMR也可以配备传感器来监测环境条件,例如温度、湿度和空气质量。他们可以自主收集这些数据并将其传输到中央数据库进行分析。安森美提供一系列传感器,例如温度传感器、湿度传感器和气体传感器,可使AMR准确可靠地监测环境条件。
AMR也越来越多地用于医疗保健行业的各种任务,例如运送医疗用品、运送患者和协助手术。这些机器人依赖于各种传感器、执行器和其他电子零部件才能正常运行,安森美是AMR行业此类零部件的领先供应商之一。
结语
机器人的智能感知能力,能够使机器人进行安全的移动和进行全面的导航控制,其中需要部署多套传感器技术,并结合AI算法与其所有相关应用、软件和固件,才能使机器人实现真正的智能,并能够与人类协同工作。本文所介绍的各家厂商的机器人应用解决方案,限于篇幅仅能做简单介绍,若想进一步了解这些产品的特色,请与艾睿电子联络,以取得更详细的信息。
审核编辑:汤梓红
-
传感器
+关注
关注
2550文章
51035浏览量
753076 -
机器人
+关注
关注
211文章
28380浏览量
206916 -
人工智能
+关注
关注
1791文章
47183浏览量
238253 -
TOF
+关注
关注
9文章
482浏览量
36331
原文标题:【技术干货】结合机器人感知和人工智能创造新时代
文章出处:【微信号:艾睿电子,微信公众号:艾睿电子】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
资料:移动机器人能否自动充电?
Labview My RIO 移动机器人
基于LPC2119的自主式移动机器人设计方案
家庭移动机器人避障常用传感器及相关技术
如何实现移动机器人的设计?
请问怎么设计一种室外移动机器人组合导航定位系统?
什么是移动机器人软硬件系统问题
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
基于Matlab和VR技术的移动机器人建模及仿真
仙知机器人自主研发用于移动机器人应用专业级客户端软件Roboshop







 工商网监
工商网监
评论