 光学编码器分辨率的定义方法
光学编码器分辨率的定义方法

光学编码器由于功能类似,很难比较。磁性编码器作为一种以数字形式提供附着在机械轴上的磁体角度的器件,常用“分辨率”作为其关键的规格参数,用它来代表传感器能够辨识的最小角度。然而,由于在宣传和技术文档中分辨率的定义方式不同,用户在比较产品时常常被误导。
本文提出了分辨率最具意义的定义方法,可以帮助用户在各种各样的产品数据手册中始终清晰地确定分辨率。 文章还将说明,对于磁性编码器,单靠分辨率是不足以充分比较产品的;很多磁性位置传感器数据手册中缺失的传感器带宽,也是比较磁性角度传感器必要的参数。
测量误差
在定义分辨率之前,首先需要澄清有关测量误差的一些要点。测量误差被定义为一个参数的测量值与其真实值之间的差异。此误差由两个部分构成,如下所述:
系统(或偏移)误差:在相同的条件下进行多次测量,其中保持不变的分量即为系统误差。该误差是大量测量的平均值与被测参数真实值之间的差异估值。
随机误差:随机误差为总误差减去系统误差。它代表了在相同条件下执行的一组测量中不可预测的变化。
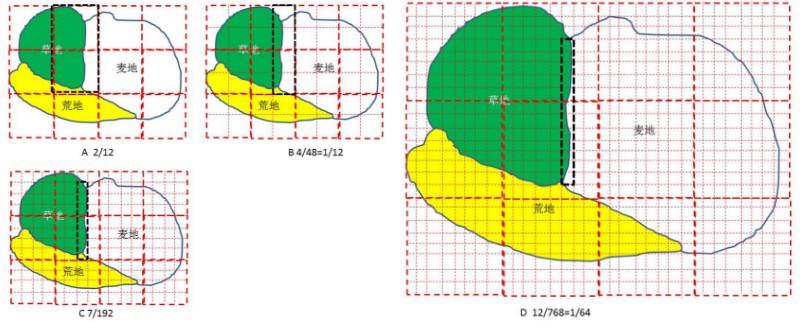
图 1 所示为随机误差和系统误差的不同组合情况。其中包括三组测量值,分别具有不同数量的随机误差和系统误差。A组随机误差较大,B组系统误差较大,而C组则具有相似的随机误差和系统误差。
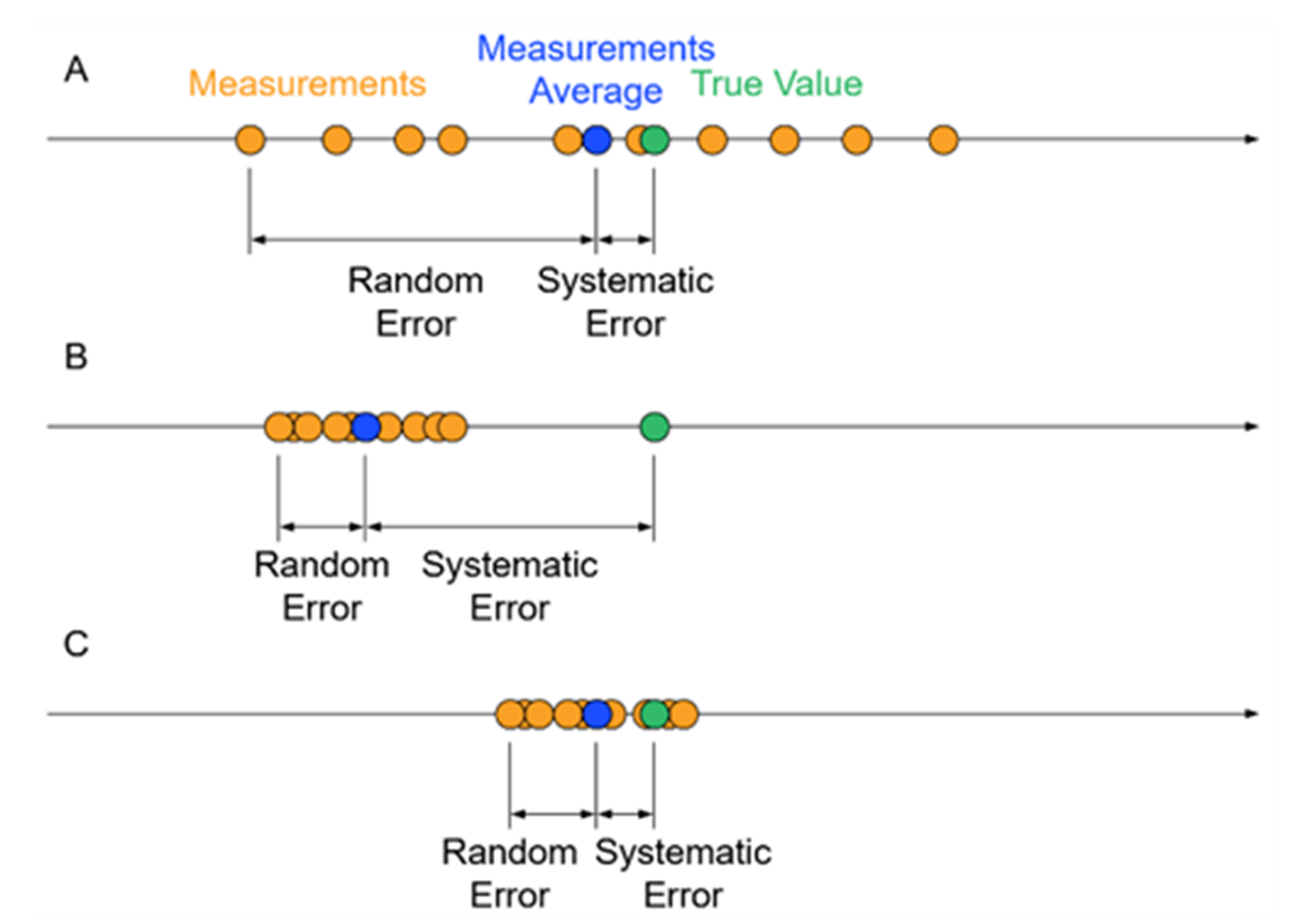
图 1:随机误差和系统误差的不同组合情况
在磁性角度传感器的数据手册中,系统误差和随机误差分别表示为 INL 和分辨率。为简单起见,本文将假设传感器没有系统误差,这意味着平均值即真实值。
了解伺服控制回路中的角度位置传感器分辨率与带宽
探索磁性角度位置传感器的主要规格及优势
文章 
采用磁传感器提升触觉人机界面的可靠性
本文为设计高性价比的非接触式 HMI 解决方案提供了简单的设计指南,该方案拥有无可比拟的使用寿命和低功耗。
MA600(MA600)(MA600(MA600))是光学编码器的有力竞争者,可以完美替代市场现有的霍尔角度位置传感器。
应用模块
探讨MPS在机器人领域的集成电机驱动器和电池管理 IC 解决方案
标准偏差和置信度
在测量中用于量化随机误差的指标称为标准偏差 (σ)。在统计学中,σ 衡量一组样本在其平均值附近的分散度。分散度越高,σ 越高。该参数也称为均方根 (RMS) 噪声。
当随机变化不依赖于过去的误差时,测量数据集通常遵循钟形曲线分布,也称为高斯或正态曲线(见图 2)。高斯曲线在测量平均值 (µ) 处达到峰值,σ 表征其宽度。如果将高斯曲线下的总面积归一化为 1,则由[a1, a2] 值范围界定的面积就是测量结果落在 a1 和 a2 之间某处的概率。范围越大,单个测量值落入该范围的置信度就越高。
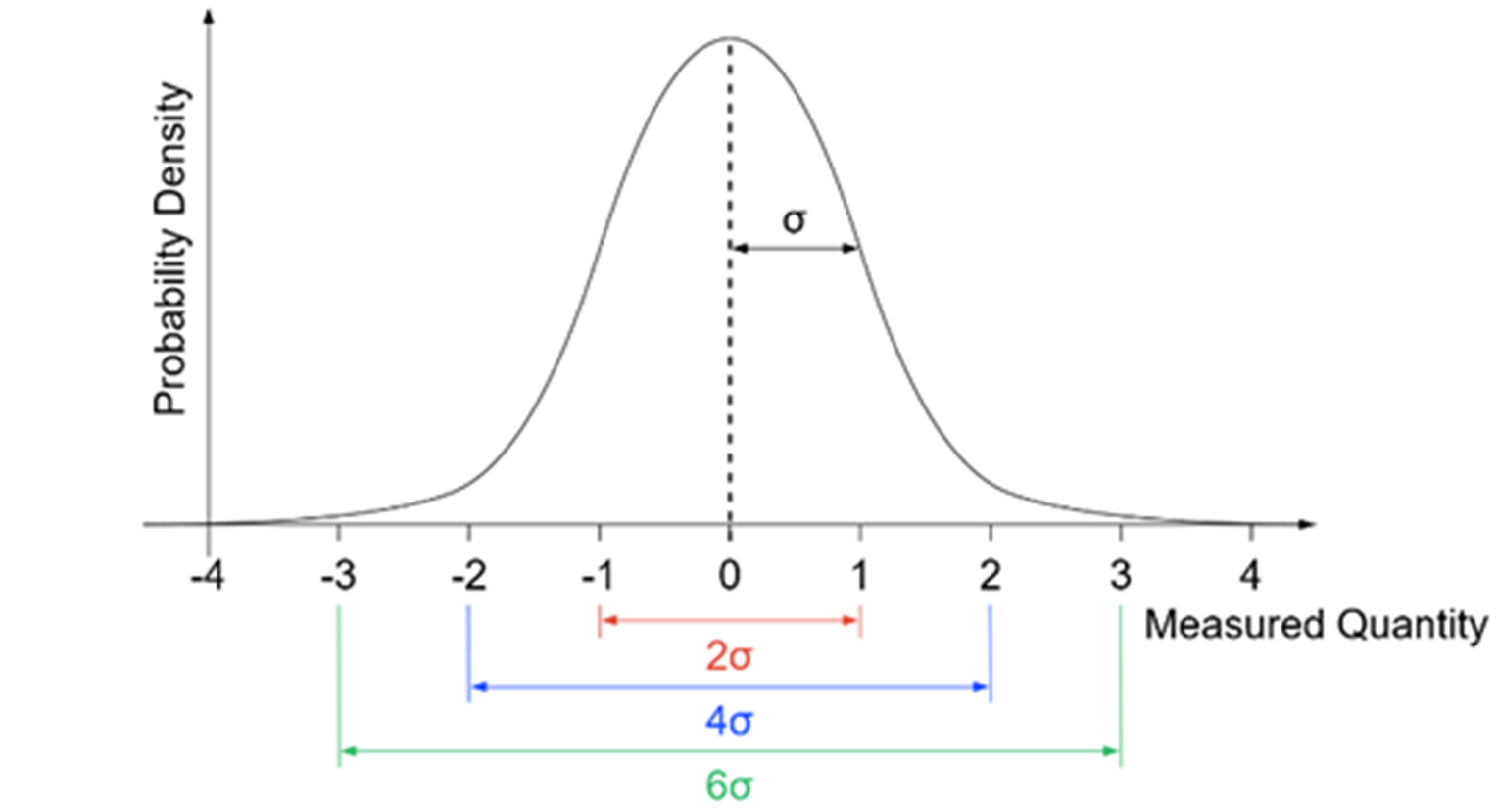
图2: 高斯分布(µ = 0 和σ = 1)
表 1 列出了测量值在 [µ - nσ, µ + nσ] 范围内的概率或置信度。
表 1:部分n 值的置信因子
| n | 置信度(%) |
| 1 | 68.269 |
| 2 | 95.450 |
| 3 | 99.730 |
| 4 | 99.993 |
定义分辨率
美国国家标准与技术研究院 (NIST) 将分辨率定义为“ 测量系统检测并准确指示出测量结果特征微小变化的能力”。
分辨率是仪器可以检测到的最小区间。为确定这个区间,本文将假设随机误差的分布遵循高斯分布。这就引出了一个问题:对磁性角度传感器而言,两个角度应相距多远,才能以相当高的概率区分它们?
当两个角度之间的距离小于6σ时,以角度为中心的两个噪声分布明显重叠(如图3中的A)。 如果测量结果落在重叠区域,则无法知道真正的角度是角度a1还是角度a2。只有当两个角度之间的距离等于或大于 6σ 时,单次测量才能以等于或高于 99.73% 的置信度区分这两个点(如图3中的B)。因此,传感器的分辨率为一个6σ区间。
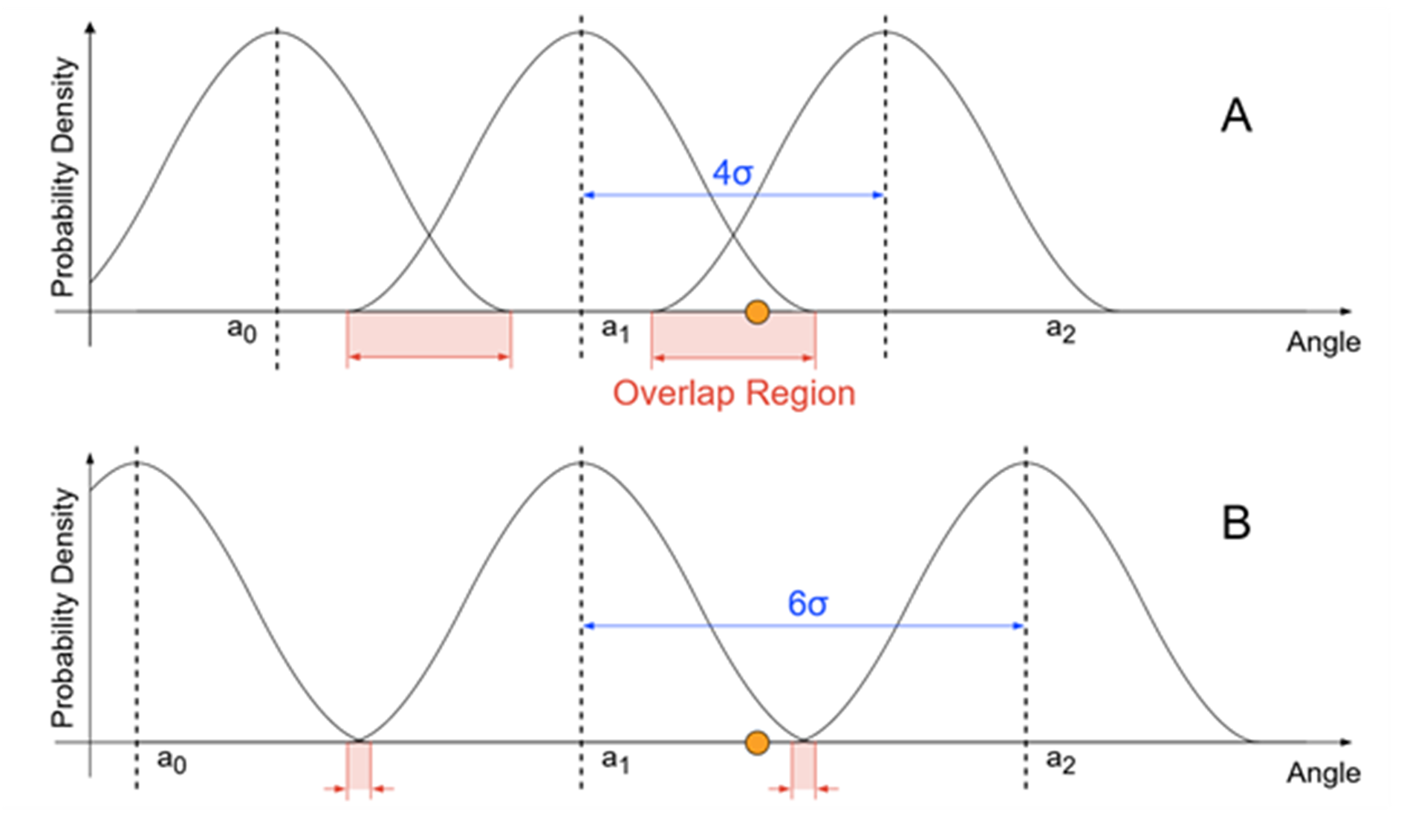
图 3:以 µ1 为中心的 6σ 区间中包含的样本
模数转换
位置传感器的输出通常以数字形式给出,例如,通过 ABZ 或 SPI 接口提供。在这种情况下,来自磁性传感器的模拟信号必须被数字化。图 4 显示了数字磁角度传感器的简化框图。注意,图中包含的滤波器模块,我们将在下一节进一步讨论。
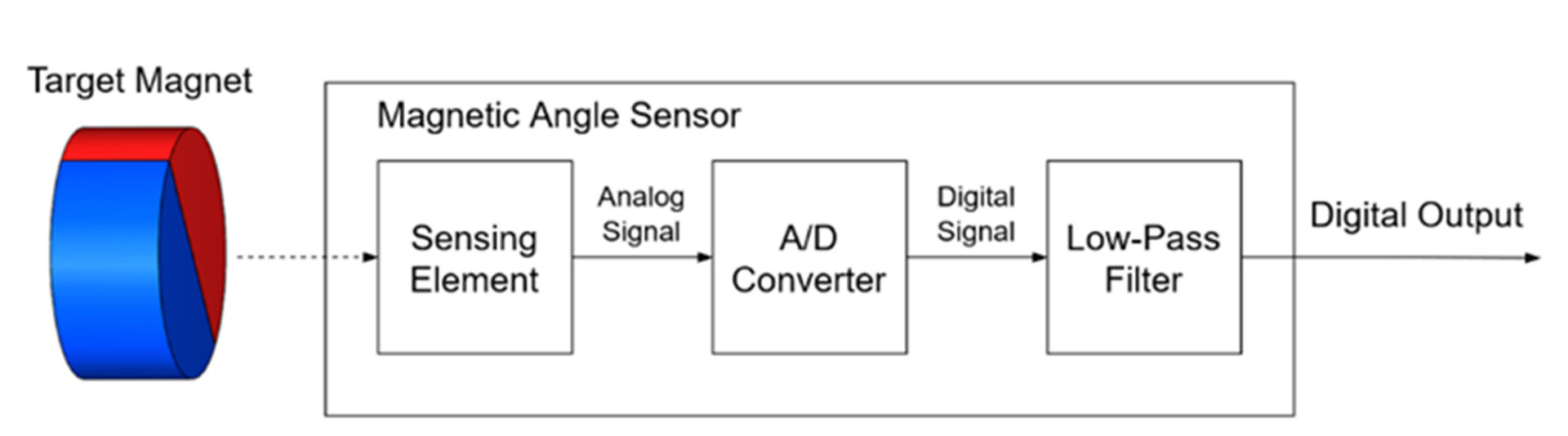
图4: 数字磁角度传感器功能框图
AD 转换的步长(即模拟域中值的范围除以数字域中的步数)通常被错误地解释为传感器的分辨率。 实际上只有当模拟信号的峰峰值噪声小于 AD 转换的步长时,这种解释才是正确的。
然而在大多数情况下并非如此。模拟信号的峰峰值噪声常常超过 AD 步长,它在传感器的数字输出中表现为输出端最低有效位 (LSB) 的随机闪烁。这也是模数转换器 (ADC) 制造商还会定义“无噪声分辨率”或“峰峰值分辨率”等指标的原因。
图 5 显示了噪声如何从模拟域传输到数字域。在此示例中,步长为 1,峰峰值噪声为 6。连续分布和离散分布分别显示于 X 轴和 Y 轴上。由于噪声超过数字步长,因此减小步长并不会提高分辨率。
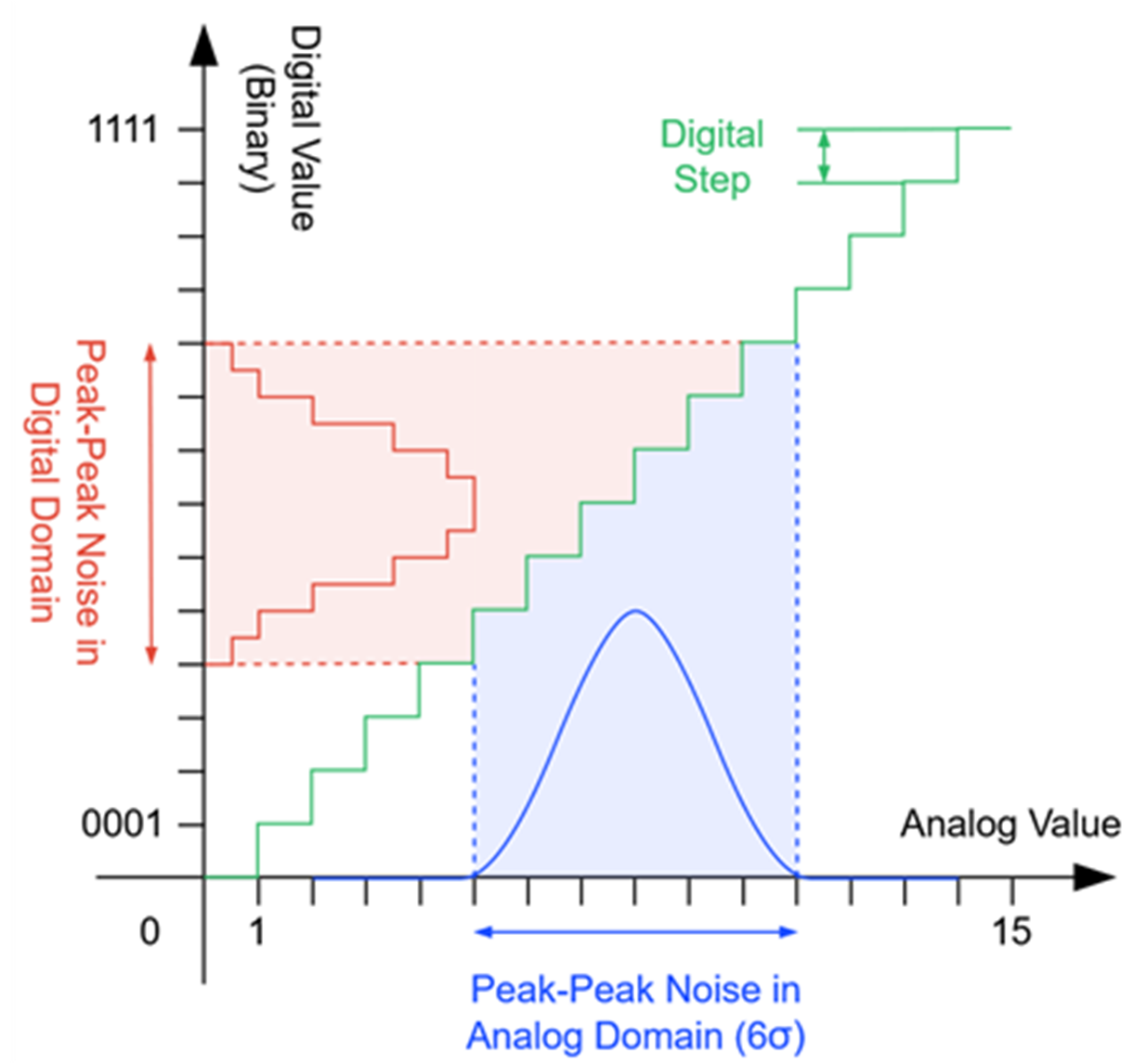
图5: 模数转换中的噪声
当以数字格式提供测量值时,分辨率也可用位(bit)来表示,并用公式 (1) 计算:
$$resolution_{bit} = log_2 frac {FS}{6 sigma}$$
其中 FS 为测量值的满量程。
如果是角度测量,则FS = 360°,分辨率可以通过公式 (2) 来估算:
$$resolution_{bit} = log_2 frac {360}{6 sigma}$$
带宽
讨论传感器性能时,常常会忽视一个关键参数,即带宽,也称为截止频率。传感器带宽对应于信号的频率范围,可由传感器测量。大于传感器带宽的频率信号会被衰减。传感器的详细表征需要以分析或图形形式呈现的传递函数,至少也应提供截止频率。
如图 4所示,低通滤波器级可以在传感器中实现,用于降低传感器输出上的噪声。在这种情况下,传感器带宽与滤波器带宽相同。如果噪声分布为高斯分布,则滤波器带宽降低 4 倍会使噪声降低 2 倍,从而将分辨率提高 1 位。这意味着有关噪声或分辨率的信息应与带宽相关信息对应。
但对应用而言,带宽太低又会带来重大影响。如果传感器位于控制回路之内,系统可能会不稳定,电机可能出现振荡、噪声和/或效率损失(见图 6)。在图6中,R 是位置参考,AM 是电机轴角度,AS 是传感器输出。常见的设计规则是,让滤波器带宽至少比控制系统或控制回路带宽大十倍。
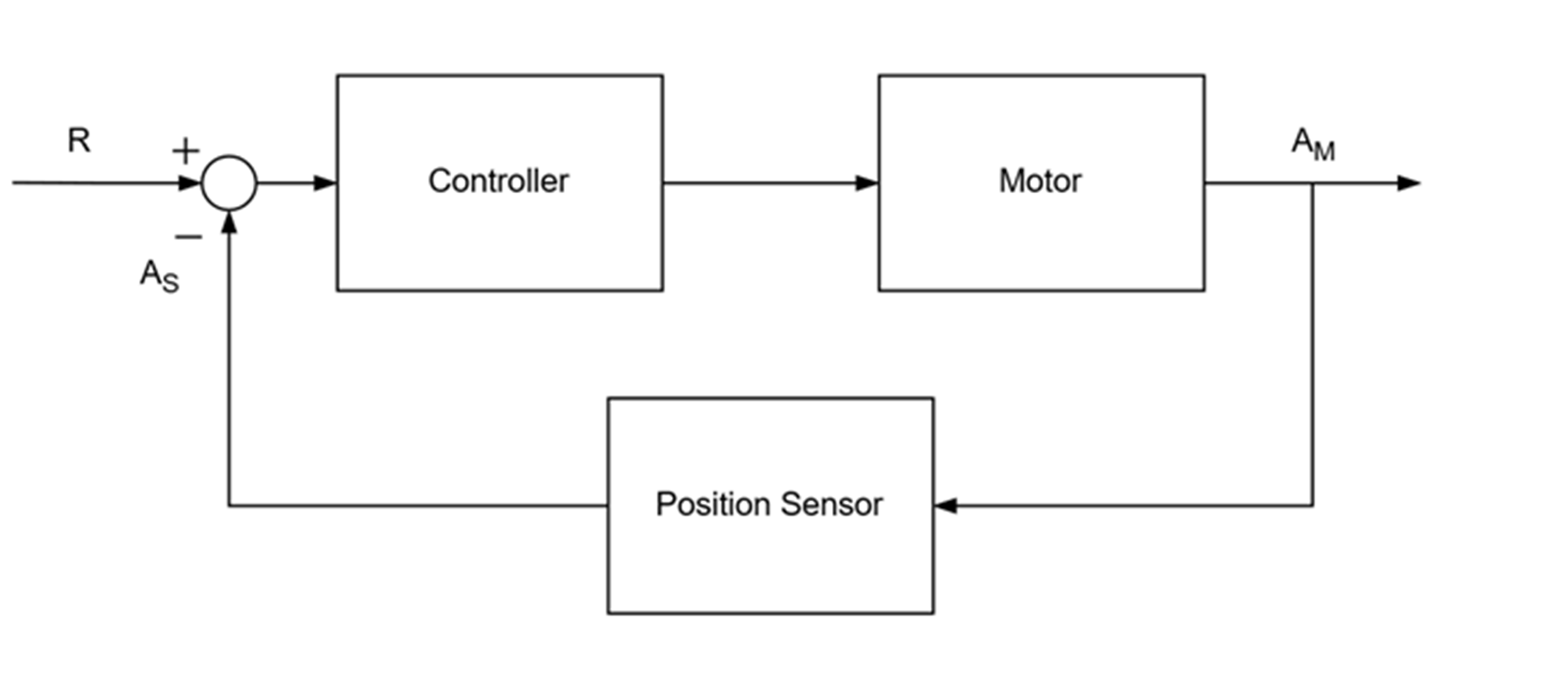
图6: 电机控制环路
图 7、图 8 和图 9 分别显示了低通滤波器带宽 (BW) 对角度测量、噪声和控制环路性能的影响。
图 7 显示出,具有高带宽滤波器的传感器输出与电机轴角度几乎重叠(分别用蓝线和绿线表示)。 而具有较低带宽滤波器的传感器输出则无法精确跟随电机的轴位置(用红线表示)。
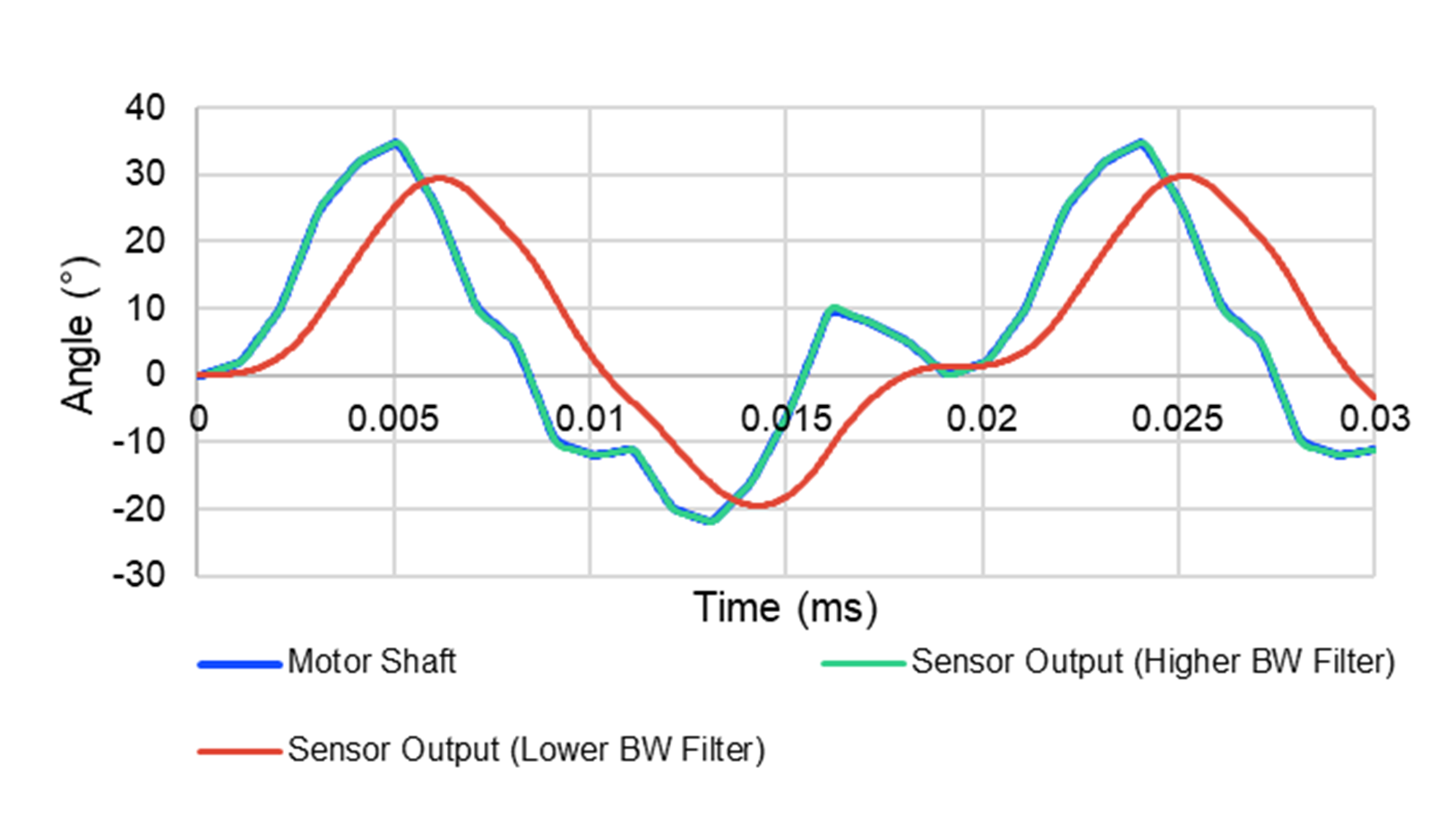
图 7:滤波器带宽对传感器输出的影响
将BW 滤波器用于角度传感器可显著降低噪声(参见图 8)。带宽越低,噪声衰减得越多。
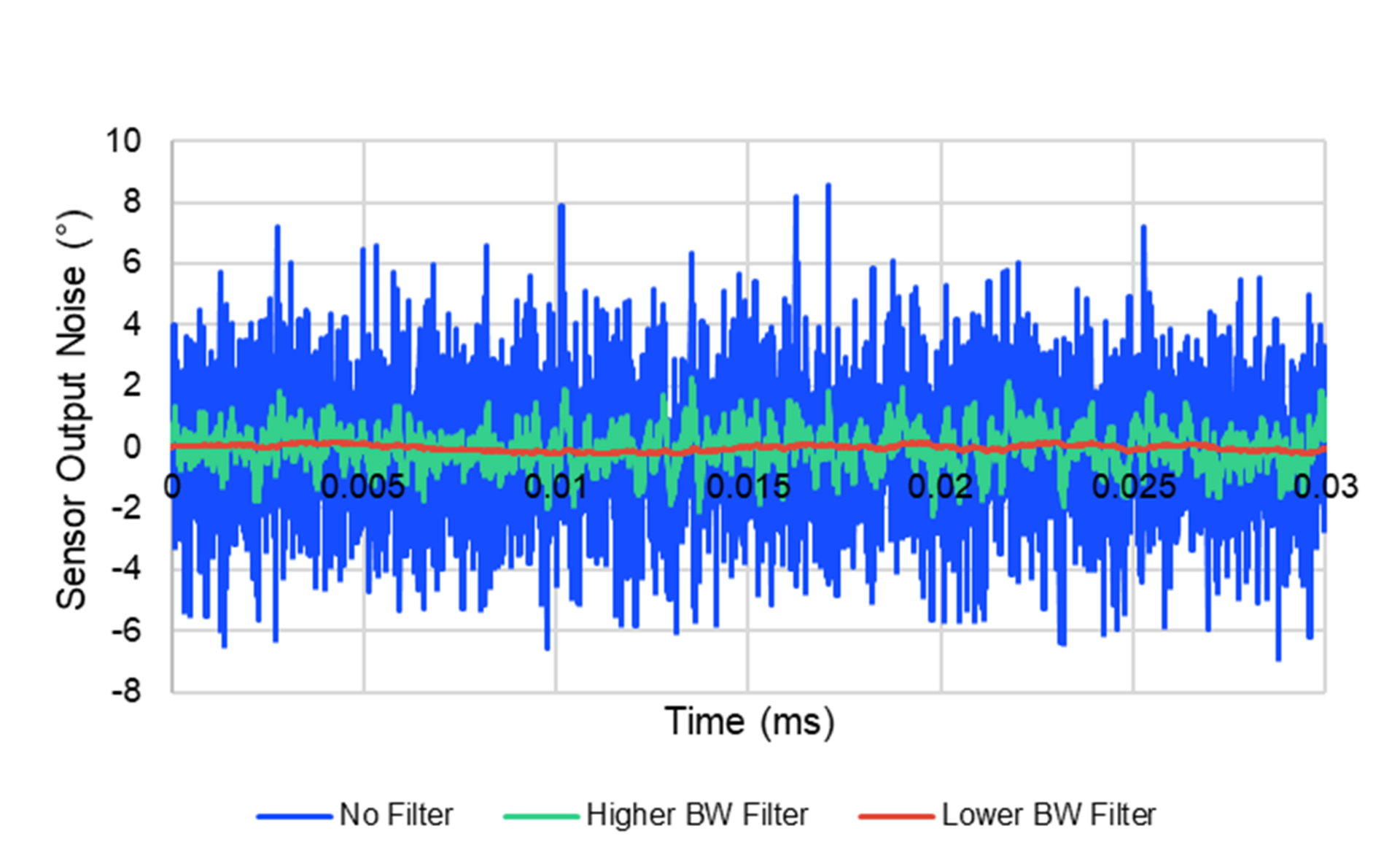
图 8:滤波器带宽对传感器输出噪声的影响
图 9 显示了不同的滤波器带宽对电机控制环路性能的影响。具有较低带宽的滤波器(用红线表示)过冲更多,稳定时间也更长。
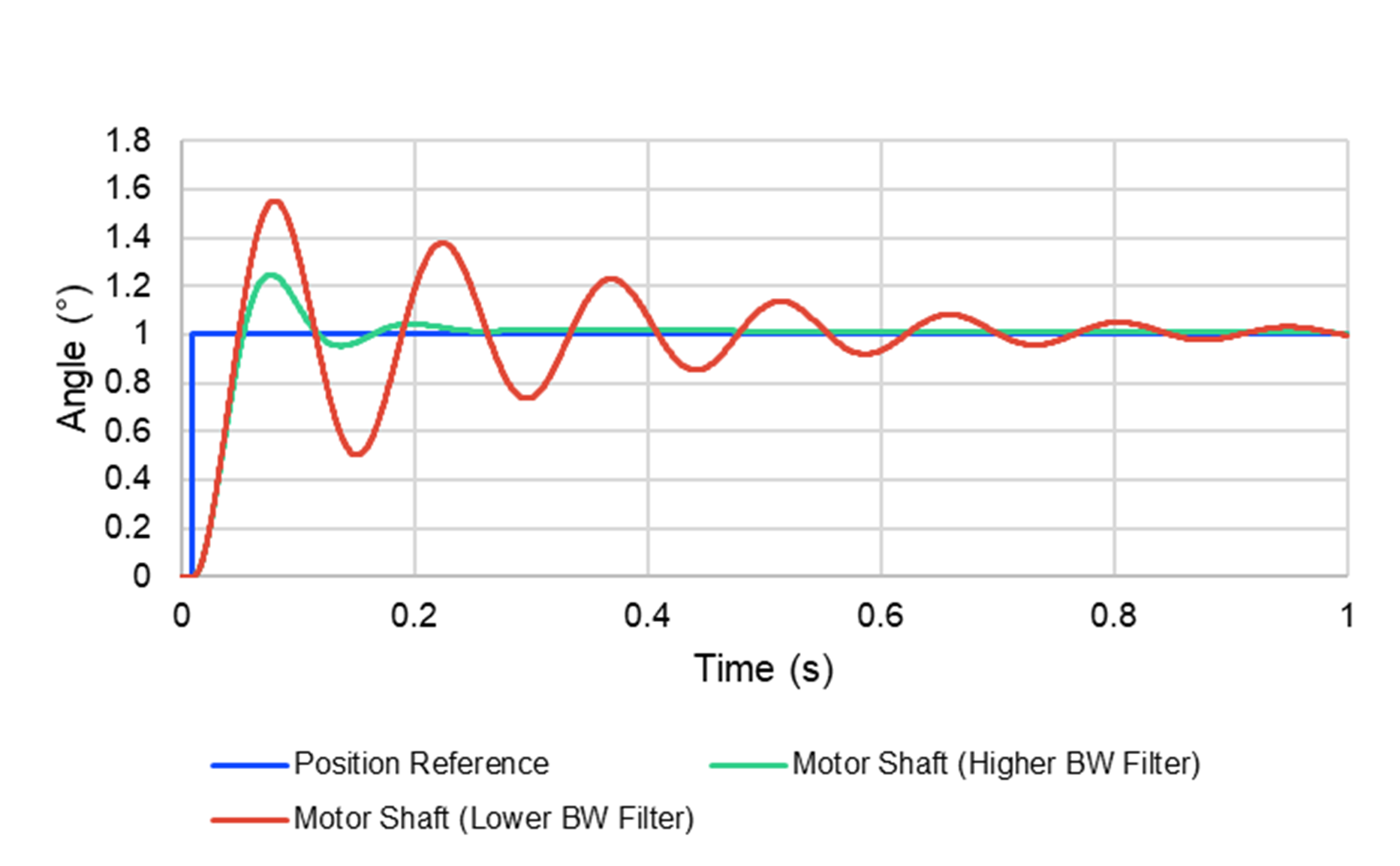
图 9:滤波器带宽对电机控制回路性能的影响
数据手册中的相关指标
为确保传感器适合您的应用,区分数字步长和实际的传感器分辨率非常重要。
通常,当数据手册中列出了 SPI 分辨率、AD 分辨率和 ABZ 分辨率等指标时,它们只表明了测量的数字表达位数,而不是实际的传感器分辨率。
传感器数据手册中的RMS 噪声、峰峰值噪声、角度噪声或噪声密度等指标才是获得传感器分辨率的可靠来源。设计人员可以通过公式 (1) 来计算以位表示的分辨率。
表 2 为一个数据手册的示例。这种分辨率具有误导性,因为它实际上是指数字步长。如果滤波器带宽是可配置的,则可能列出多个噪声值。实际分辨率可用表中所列的最低噪声值并通过公式 (3) 来计算:
$$resolution_{bit} = log_2 frac {360}{6 sigma} = log_2 frac {360}{0.06} = 12.55$$
通过比较分辨率和带宽,可以确定产品之间的实际性能差异。滤波器带宽可以通过多个参数来表示,例如时间常数、阶跃响应或截止频率。表 2 中的示例采用了滤波器时间常数和截止频率。
表2: 数据手册示例
| 参数 | 符号 | 条件 | 最小值 | 典型值 | 最大值 | 单位 |
| 分辨率 | RES | - | 14 | - | 位数位数 | |
| RMS噪声 | σ | 滤波器设置=0 | 004.004 | 0.08 0.08 | 0.14 | deg |
| 滤波器设置=3 | 0.006 | 0.01 | 0.017 | deg | ||
| 滤波器时间常数 | τ | 滤波器设置=0 | - | 125 | - | µs |
| 滤波器设置=3 | - | 1000千 | - | µs | ||
| 滤波器截止频率 | f技 技 技 技 技 技 技 技 技 | 滤波器设置=0 | - | 3,00000 | - | Hz |
| 滤波器设置=3 | - | 350 | - | Hz |
MPS传感器性能
对大多数 MPS 角度传感器,数据的数字表达位数均为 16 位;与此同时,分辨率、传感技术(霍尔或 TMR)和滤波器带宽则因器件而异。
表 3 列出了 MagAlpha 系列中部分传感器的分辨率和带宽值。注意,部分传感器具有可配置的滤波器带宽,这使它们能够适应不同的应用要求。
表3: MagAlpha系列产品
| 产品型号 | 45mT时的分辨率(位) | 滤波器带宽(Hz) | 技术 | 典型应用 |
| MA600(MA600)(MA600(MA600)) | 14.5 至 12 | 150 至 13,00000 | TMR | 闭环位置/速度控制 |
| MA732 MA732 | 14 至 9 | 23 至 6000 | 霍尔 | 闭环位置/速度控制、通用位置传感器 |
| MA330 | 14 至 9 | 23 至 6000 | 霍尔 | 无刷直流电机换向 |
| MAQ430号 | 14 至 9 | 23 至 6000 | 霍尔 | 汽车 |
| MA 730 | 14 | 370 | 霍尔 | 高分辨率编码器 |
| MA704 | 10 | 3,00000 | 霍尔 | 闭环位置/速度控制 |
| MA780 | 12 至 8 | 39 至 160000 | 霍尔 | 低功耗 |
| MA800 | 8 | 90 | 霍尔 | HMI人机界面 |
从上表可以看出,与基于霍尔的传感器相比,内部采用 TMR 传感技术的 MA600(MA600)(MA600(MA600))传感器可以在较高带宽下实现出色的分辨率。
结语
本文从随机误差以及标准偏差和置信度的统计概念出发,解释了分辨率的定义。文章还阐明了数字表达(传感器输出端提供的比特位数)与传感器测量分辨率(以数字形式提供时)之间的区别。
通过展示滤波的影响,我们还证明了确定产品的实际性能需要同时考虑分辨率和带宽。最后,文章提供了一个典型的磁性角度传感器数据手册示例,对如何正确解读其中的含义做出了说明。
审核编辑:彭菁
-
传感器
+关注
关注
2578文章
55756浏览量
795038 -
数据
+关注
关注
8文章
7361浏览量
95128 -
人机界面
+关注
关注
5文章
570浏览量
45699 -
磁体
+关注
关注
0文章
25浏览量
8100 -
光学编码器
+关注
关注
1文章
24浏览量
10755
发布评论请先 登录
伺服电机编码器分辨率
编码器怎么计算距离,编码器分辨率是什么
编码器是如何确定分辨率的
编码器的分辨率如何理解?
旋转编码器的分辨率如何选择?
具有24位绝对式编码器的高分辨率iC-Haus光学芯片
影响编码器分辨率和精度的因素
选择增量编码器分辨率的方法,影响增量式编码器分辨率的因素

伺服编码器分辨率越高越快吗?




评论