 识别并消除次谐波振荡
识别并消除次谐波振荡
识别并消除次谐波振荡
简介
DC/DC的不稳定是由多种因素造成的,例如补偿参数不当或布局不足。本文将主要讨论次谐波振荡,这是一种当电流模式开关稳压器具有连续电感电流且占空比超过 50% 时可能产生的不稳定形式,而这种振荡会导致不稳定的电源。
为了解次谐波振荡,我们以一个采用峰值电流控制模式的降压电路为例,看看这些振荡如何随时间和频率而变化。
时域次谐波振荡
图 1 显示了一个采用峰值电流控制的降压电路,该电路将误差信号 (VC) 与电感电流信号 (IL) 进行比较。其中VC 为输出电压 (VOUT) 减去参考电压 (VREF) 的差值。比较的结果将产生一个控制信号以驱动上下管MOSFET。
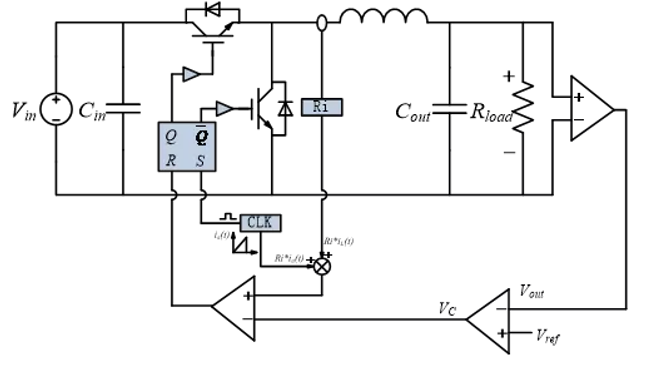
图1: VC与IL的比较
图 2 显示了 VC与IL的交叉情形。蓝线代表稳定条件下的 IL 信号和开关波形(SW),粉线则代表扰动后的 IL 信号和 SW 波形。波形中的∆I0和 ∆tON被定义为误差值。从图2可以看出,在占空比为30%时,扰动逐渐减小,系统趋于稳定。
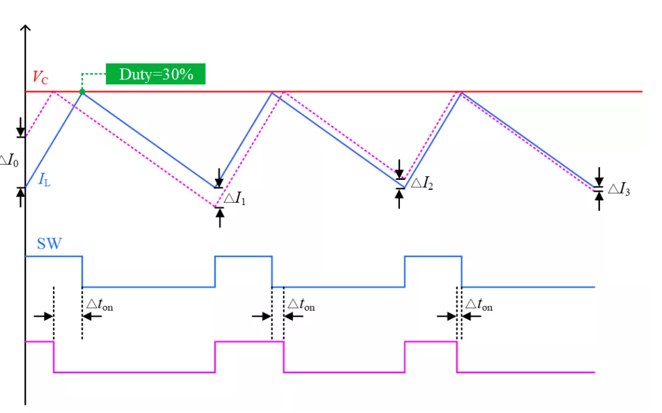
图 2:占空比为30% 时相对稳定的 IL
图 3 显示出,当占空比增加到 70% 时,扰动逐渐增大,导致了系统的不稳定。
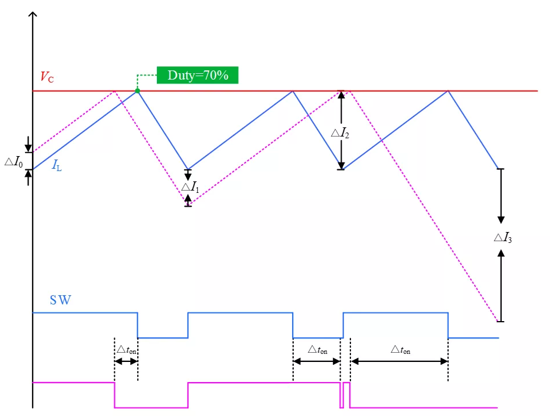
图 3:占空比为70% 时不稳定的 IL
从图 2 和图 3可以推断,50% 的占空比为扰动收敛和发散的边界点。
边界点也可以通过公式导出。在图 4 所示的电感电流扰动波形上,我们先定义变量,用D 代表占空比,m1 和 m2 代表电感电流的上升和下降斜率,ic1和ic2为电感电流达到 VC 时的值。粉色虚线上的 ∆iL(0)和 ∆iLT(s)分别代表电感电流的起始值和结束值,而蓝色实线上的 iL(0)和 iLT(s)分别代表扰动的起始值和结束值。
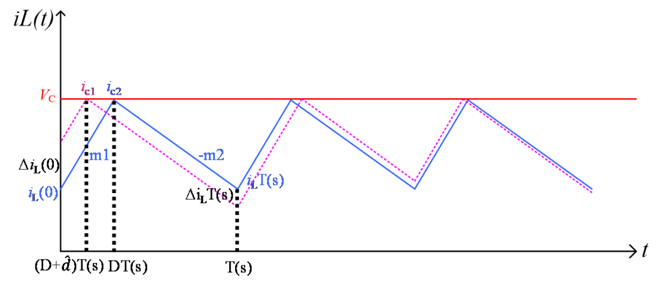
图4: 电感电流的扰动波形
利用以上定义的变量,可以通过公式 (1) 来计算 ΔiLT:

例如,在第 n 个周期中,当D 小于一半(即占空比低于 50%)时,ΔiLT逐渐收敛为零;反之,如果占空比超过 50%,则∆iLT发散。另外,干扰可以确定为次谐波振荡,因为该值可以为正,可以为负,与 n 相关,而且变化率恰好是开关频率的一半。
频域次谐波振荡
从频域的角度也可以了解次谐波振荡。根据图 1 中采用峰值电流控制的降压电路,可以得到图 5的系统结构图,由此导出由系统控制到输出的开环传递函数。
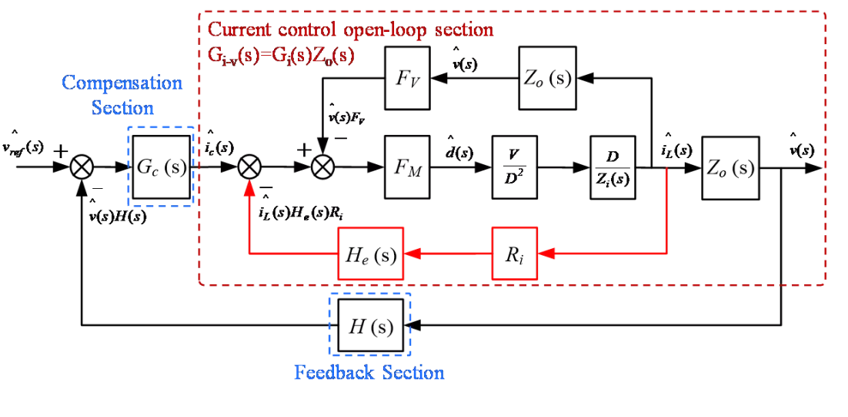
图 5:峰值电流控制降压电路系统中的开环传输
对输出采用开环传递函数控制,输入电压 (VIN) 设置为 12V,开关频率 (fSW) 设置为 400kHz,占空比按照波特图变化。图 6 显示出,当占空比为 50% 和 67% 时,增益曲线在1/2开关频率处有一个谐振峰值,而且相位曲线快速翻转,表明发生了次谐波振荡。这种现象会严重影响系统的稳定性。但是,当占空比为28%时,增益曲线和相位曲线均无异常。
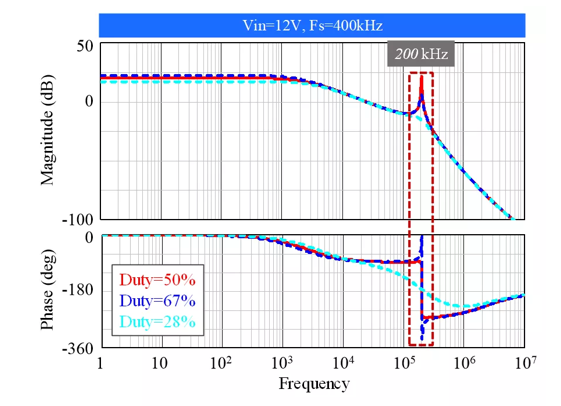
图6: Gi-v(s)函数波特图
消除次谐波振荡
减少次谐波振荡的方法有多种。图 7 显示的峰值电流控制功能框图采用了锯齿波电流补偿法。这种方法将锯齿波补偿信号叠加在电感电流信号上,从而使VC 信号从恒定信号变为脉动斜坡信号。这个过程通常被称为斜坡补偿技术。
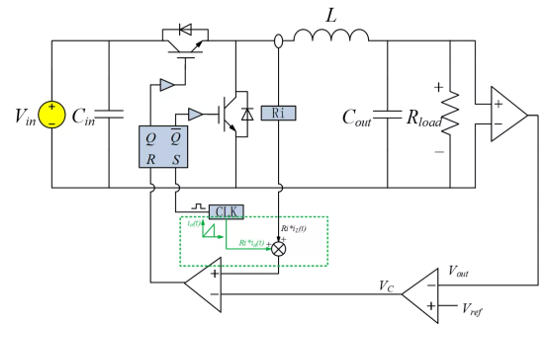
图 7:加入锯齿波电流补偿
通过比较有斜坡补偿和无斜坡补偿时的情况,可以展示斜坡补偿技术的抑制效果,如图 8所示。
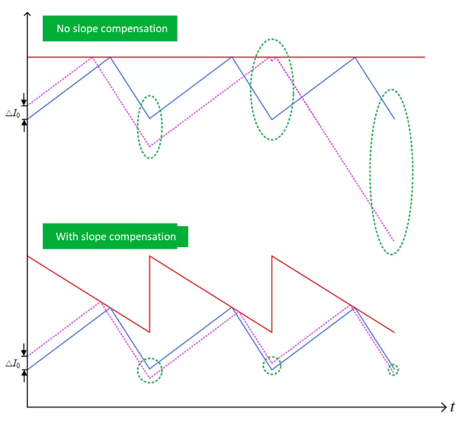
图 8:锯齿波电流补偿的抑制效果
斜坡补偿技术也可以通过数学推导和频域进行分析。
斜坡补偿技术的缺点
斜坡补偿虽然可以抑制次谐波振荡,但它也有缺点,在电源设计过程中需要考虑到,例如:
由于增加了斜坡补偿,芯片的限流值将随占空比的增加而逐渐减小
过大的斜坡补偿会影响系统的动态性能
以MPQ4420A为例,这是一款内置功率 MOSFET 的高效同步降压变换器。从图 9可以看出,其占空比越大,限流点越小。
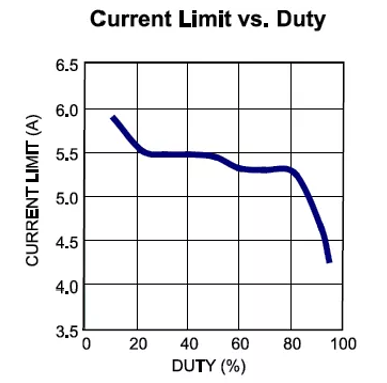
图9: MPQ4420A限流点与占空比的关系
图 10 显示了带斜坡补偿的 Gi-v(s)函数,其中 Mc 是斜坡补偿系数。补偿系数越大,系统带宽越小,系统动态响应就越慢。
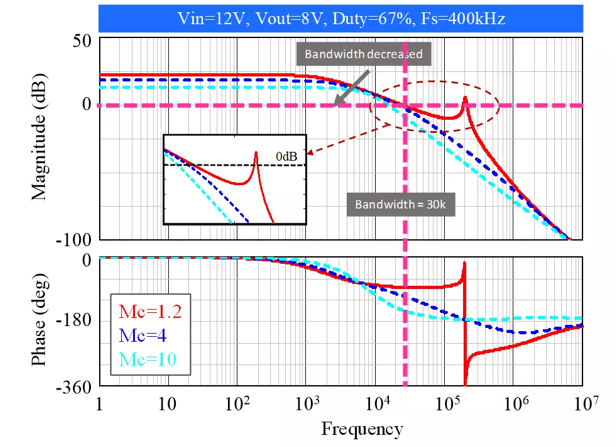
图 10:带斜坡补偿的 Gi-v(s)波特图
结论
上文表明,控制次谐波振荡以维持开关电源的稳定性至关重要。在文章中,我们讨论了如何通过时域和频域来识别次谐波振荡,还介绍了通过斜坡补偿来减少次谐波振荡的方法,当然它也有一些负面影响
MPS 的隔离式 DC/DC 电源模块等产品可以提供先进的电源解决方案,保证DC/DC 的稳定性。
审核编辑:汤梓红
-
MOSFET
+关注
关注
147文章
7575浏览量
215493 -
降压电路
+关注
关注
13文章
168浏览量
59855 -
谐波
+关注
关注
7文章
832浏览量
42058
发布评论请先 登录
相关推荐
ADC12D1600计算SFDR得出的数值只有30dB,主要是2次谐波太大了,如何消除2次谐波?
斜率的传递函数:次谐波振荡的理论解释
三次谐波和五次谐波失真严重是由哪些原因造成的?
怎样消除三次谐波对发电机的影响
如何消除5次和7次谐波
三次谐波是什么,三次谐波会造成哪些影响
浅谈巴拿马电源的谐波消除原理






 工商网监
工商网监
评论