 基于单片机的DS1302实时时钟实验 实时时钟芯片DS1302的工作原理
基于单片机的DS1302实时时钟实验 实时时钟芯片DS1302的工作原理
概述
在许多系统当中都需要精确的时钟功能,因此时钟芯片孕育而生。其中美国达拉斯 DALLAS 公司设计的 DS1302 是一款非常流行的数字时钟芯片。DS1302 是一款具有涓细电流充电能力的低功耗实时时钟芯片。它可以对年、月、日、星期、时、分、秒进行计时,并且具有闰年功能。年计数可达到 2100 年。
15.1 DS1302 功能简介
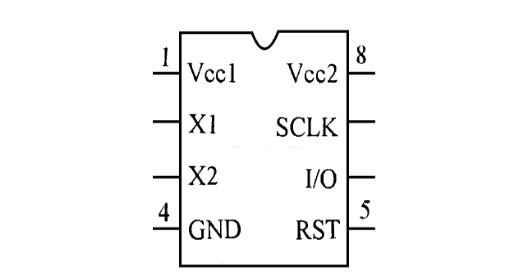
DS1302 内部包含 31 字节的通用 RAM,实现设置备用电池功能。采用 3 线制的串行数据通信接口,并且适用于大多数的微处理器。工作电压范围达到 2~5V,与 5VTTL 电平完全兼容。支持单字节或多字节时钟、RAM 数据读、写操作。当工作电压为 2V 时,工作电流低至 320nA。工业级 DS1302 正常工作温度范围为:-40℃ ~85℃,芯片包括直插和贴片两种封装模式,封装示意图如下所示: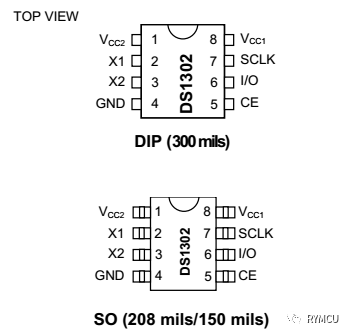
DS1302 典型通信电路如下图所示:
如上图所示,只需 3 根线 CE、I/O、SCLK 便可实现处理器与 DS1302 之间通信,上图中 X1,X2 之间为外接时钟晶振,VCC2 为电源供电端,VCC1 为备用电池端。各管脚定义及功能如下所示: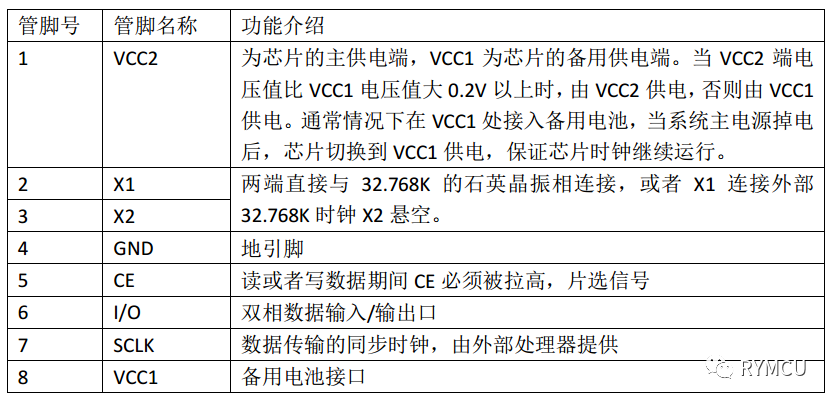
15.2 单字节操作模式
与 DS1302 进行数据通信时,首先得向 DS1302 传输一个字节的控制指令,控制指令位定义如下所示。
字节的最高位 bit7 必须为 1,否则无法向 DS1302 写入数据。Bit6 为 1 时,表示后续对 31 字节的 RAM 进行读写操作,为 0 时,表示后续将对时钟寄存器进行读写操作。Bit5~bit1 为后续操作的时钟寄存器或 RAM 的地址。最低位 bit0 为 1 时,表示读取 DS1302 的数据,为 0 时,表示向 DS1302 写入数据。对 DS1302 进行单字节模式的读、写操作时序如下图所示。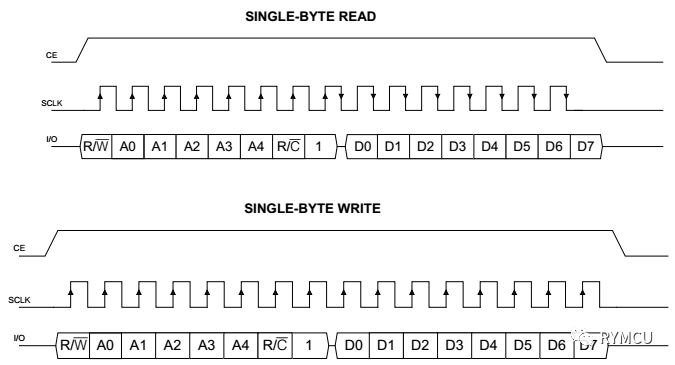
单字节写操作(Single-Byte Write)时序为首先向 DS1302 写入控制指令,紧接着写入一个字节的数据。写入的顺序为低位在前,高位在后的传输方式,要求在时钟上升沿准备好数据。单字节读操作(Single-Byte Read)时序为首先向 DS1302 写入控制指令,紧接着 SCLK 的的下降沿 DS1302 有数据 D0 输出,因此在接下来的上升沿前读取稳定的 D0 值,依次类推至 D7。根据上图时序要求,往 DS1302 写入一个字节和读取一个字节的函数如下所示:
//写字节
void WrByte_1302(uchar dat)
{
uchar j;
bit flag;
for(j=1;j<=8;j++)
{ //从低到高依次将1Byte数据写入DS1302
flag = dat&0x01;
IO_1302 = flag;//将要写的位放到总线
SCLK_1302 = 0;
SCLK_1302 = 1;//产生一个上升沿,完成1位数据写入
dat=dat >>1;//将数据移到下一位
}
}
//读字节
uchar RdByte_1302(void)
{
uchar dat,flag,j;
for(j=1;j<=8;j++)
{
SCLK_1302 = 1;//产生一个下降沿
SCLK_1302 = 0;
flag = IO_1302;//读取DS1302发出的一位数据
dat=(dat >>1)|(flag< < 7);//读出的值最低位在前面
}
return dat;
}
如上所示,写字节函数 WrByte_1302()中,要求单片机在时钟 SCLK_1302 上升沿前将数据放到数据总线 IO_1302 上,然后产生一个 SCLK_1302 上升,完成一 bit 数据的写入,同时要求 1Byte 的数据低位在前,高位在后依次发送。读字节函数 RdByte_1302()中,要求在时钟 SCLK_1302 下降沿之后,将总线 IO_1302 数据读出,同时要求 1Byte 的数据低位在前,高位在后依次读取。
在上述函数的基础上,单字节操作模式的读、写函数如下所示:
//单字节写模式
void WrSingle_1302(uchar addr,uchar dat)
{
CE_1302 = 1;//拉高片选
WrByte_1302(addr);//写入地址及控制指令
WrByte_1302(dat);//写入数据
CE_1302 = 0;//拉低片选
SCLK_1302 = 0;//释放始终总线,满足下次操作时序要求(非常重要)
}
//单字节读模式
uchar RdSingle_1302(uchar addr)
{
uchar dat;
CE_1302 = 1;//拉高片选
WrByte_1302(addr);//写入地址及控制指令
dat = RdByte_1302();//读取一个字节数据
CE_1302 = 0;//拉低片选
return dat;
}
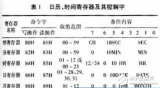
我们这里重点讲述 DS1302 的时钟功能,因此与涓流充电有关的 31 字节 RAM 操作这里不做详细的介绍。与实时时钟有关的寄存器如图所示。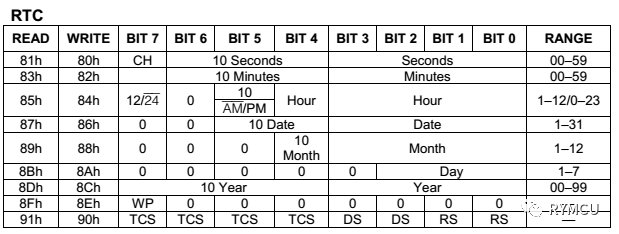
与时钟有关的寄存器总共有 9 个如上图所示,前 7 个分别为:秒、分、时、日、月、星期、年,均为 8 位寄存器。以秒寄存器为例介绍时间的表示法,其中 bit6-bit4 为秒的十位,bit3-bit0 为秒的个位。59 秒时,bit6-bit4=“101”,bit3-bit0=“1001”,其它依此类推。另外,设置“时”寄存器的 bit7 可以设置为 12 小时或 24 小时制。上述寄存器的读写控制指令字节分别如图左侧两列所示。
秒寄存器的 CH(bit7)定义为时钟运行标志位,当该位被设置成 1 时,时钟计时停止,并且 DS1302 进入低功耗模式。当设置为 0 时,启动计时。上电初始状态时,该位状态不定,因此在时钟初始化时确保该位被清 0,保证后续时钟芯片正常运行。
第 8 个寄存器为控制寄存器,WP(bit7)为写保护位,当设置为 1 时,无法向 DS1302 写入数据,上电时该位状态不定,因此,需要对 DS1302 其它寄存器进行写操作之前,务必先将 WP 设置为 0。第 9 个寄存器不影响实现时钟功能,暂不做介绍。
因此,在 DS 1302 应用时要对它进行初始化,首先解除写保护,然后将与时间有关的 7 个寄存器赋初值,将初始化的内容放到函数 Init_1302(Uchar *SetTime)中。另外,我们将从 DS1302 读取 7 个时间值的操作放到函数 GetTime(*CurrentTime)中,如下代码所示。
//1302初始化
void Init_1302(uchar *SetTime)
{
uchar j;
CE_1302 = 0;//初始化通信引脚
SCLK_1302 = 0;
WrSingle_1302(0x8E,0x00);//解除写保护(WP=0)
for(j=0;j<=6;j++)
{
WrSingle_1302(0x80+2*j,SetTime[j]);//写入7个时钟数据
}
//WrBurst_1302(SetTime);//当采用Burst模式时,使用此语句替代上面for循环语句
}
//获取当前时间值
void GetTime(uchar *CurrentTime)
{
uchar j;
CE_1302 = 0;//初始化通信引脚
SCLK_1302 = 0;
for(j=0;j<=6;j++)
{
*CurrentTime = RdSingle_1302(0x81+2*j);//读取7个时钟数据
CurrentTime++;
}
//RdBurst_1302(CurrentTime); //当采用Burst模式时,使用此语句替代上面for循环语句
}
到目前为止,我们已经学习了时钟芯片 DS1302 的功能介绍,以及初始化和时钟获取函数的编写,RY-51 单片机开发板上 DS1302 电路原理图如下所示,三根通信线分别接 4.7K 上拉电阻,分别与单片机的 I/O 口相连接。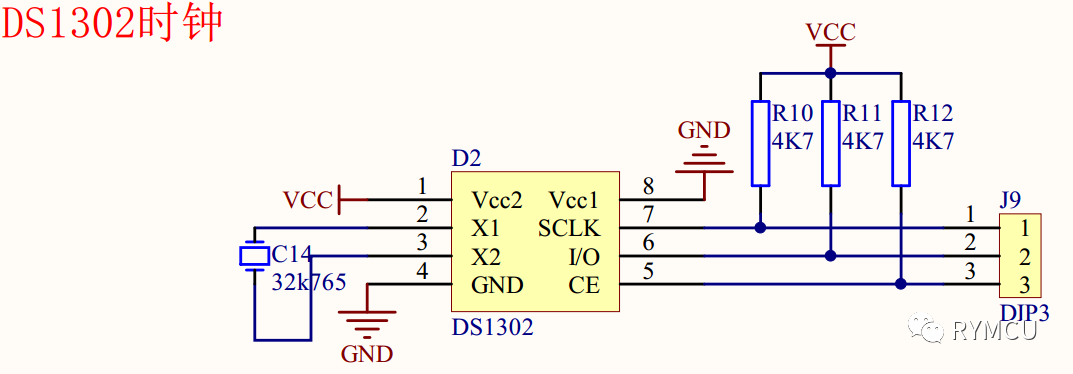
按照惯例我们将和 DS1302 有关的函数打包放入"Drive_DS1302.h","Drive_DS1302.c"中,方便后续调用及移植。"Drive_DS1302.h"代码如下:
#ifndef __DS1302_H__
#define __DS1302_H__
//1302初始化
extern void Init_1302(unsigned char *SetTime);
//获取时间
extern void GetTime(unsigned char *CurrentTime);
//单字节模式写
void WrSingle_1302(unsigned char addr,unsigned char dat);
//单字节模式读
unsigned char RdSingle_1302(unsigned char addr);
//突发模式写
void WrBurst_1302(unsigned char *SetTime);
//突发模式读
void RdBurst_1302(unsigned char *CurrentTime);
#endif
"Drive_DS1302.c"代码如下:
#include< reg52.h >
#include"Drive_DS1302.h"
#define uchar unsigned char
#define uint unsigned int
sbit CE_1302 = P1^2; //DS1302通信引脚CE,I/O,SCLK定义
sbit IO_1302 = P1^1;
sbit SCLK_1302 = P1^0;
//写字节
void WrByte_1302(uchar dat)
{
uchar j;
bit flag;
for(j=1;j<=8;j++)
{ //从低到高依次将1Byte数据写入DS1302
flag = dat&0x01;
IO_1302 = flag;//将要写的位放到总线
SCLK_1302 = 0;
SCLK_1302 = 1;//产生一个上升沿,完成1位数据写入
dat=dat >>1;//将数据移到下一位
}
}
//读字节
uchar RdByte_1302(void)
{
uchar dat,flag,j;
for(j=1;j<=8;j++)
{
SCLK_1302 = 1;//产生一个下降沿
SCLK_1302 = 0;
flag = IO_1302;//读取DS1302发出的一位数据
dat=(dat >>1)|(flag< < 7);//读出的值最低位在前面
}
return dat;
}
//单字节写模式
void WrSingle_1302(uchar addr,uchar dat)
{
CE_1302 = 1;//拉高片选
WrByte_1302(addr);//写入地址及控制指令
WrByte_1302(dat);//写入数据
CE_1302 = 0;//拉低片选
SCLK_1302 = 0;//释放始终总线,满足下次操作时序要求(非常重要)
}
//单字节读模式
uchar RdSingle_1302(uchar addr)
{
uchar dat;
CE_1302 = 1;//拉高片选
WrByte_1302(addr);//写入地址及控制指令
dat = RdByte_1302();//读取一个字节数据
CE_1302 = 0;//拉低片选
return dat;
}
//突发写模式
void WrBurst_1302(uchar *SetTime)
{
uchar j;
CE_1302 = 1;//拉高片选
WrByte_1302(0xBE);//Burst模式写专用指令
for(j=0;j<=6;j++)
{
WrByte_1302(SetTime[j]);//写入7位时钟数据
}
CE_1302 = 0;//拉低片选
}
//突发读模式
void RdBurst_1302(uchar *CurrentTime)
{
uchar j;
CE_1302 = 1;//拉高片选
WrByte_1302(0xBF);//Burst模式读专用指令
for(j=0;j<=6;j++)
{
*CurrentTime = RdByte_1302();//读取一个字节数据;
CurrentTime++;
}
CE_1302 = 0;//拉低片选
}
//1302初始化
void Init_1302(uchar *SetTime)
{
uchar j;
CE_1302 = 0;//初始化通信引脚
SCLK_1302 = 0;
WrSingle_1302(0x8E,0x00);//解除写保护(WP=0)
for(j=0;j<=6;j++)
{
WrSingle_1302(0x80+2*j,SetTime[j]);//写入7个时钟数据
}
//WrBurst_1302(SetTime);//当采用Burst模式时,使用此语句替代上面for循环语句
}
//获取当前时间值
void GetTime(uchar *CurrentTime)
{
uchar j;
CE_1302 = 0;//初始化通信引脚
SCLK_1302 = 0;
for(j=0;j<=6;j++)
{
*CurrentTime = RdSingle_1302(0x81+2*j);//读取7个时钟数据
CurrentTime++;
}
//RdBurst_1302(CurrentTime); //当采用Burst模式时,使用此语句替代上面for循环语句
}
下面我们利用上面编写的函数以及学习的单片机的知识,开始编写一个小的时钟显示综合应用程序。程序的功能为:上电时由单片机对 DS1302 进行初始化,设置时间为 2017 年、星期日、12 月 31 日、23 时 58 分 56 秒,初始化完成后,每隔 500ms 获取 DS1302 的时间,并将时间显示到 1602 液晶显示器上,主函数程序如下所示:
#include< reg52.h >
#include"Drive_1602.h"
#include"Drive_DS1302.h"
#define uchar unsigned char
#define uint unsigned int
#define FOSC 11059200 //单片机晶振频率
#define T_1ms (65536 - FOSC/12/1000) //定时器初始值计算
sbit DU = P2^7;//数码管段选、位选引脚定义
sbit WE = P2^6;
sbit DU_L = P2^3;
uchar T_flag = 0;//定时500ms标志位
uchar str[23]=0; //字符临时存储变量
unsigned char code SetTime[7]={//2017年,星期日,12月31日,23时58分56秒,时间初始值
0x56,0x58,0x23,0x31,0x12,0x07,0x17};
uchar CurrentTime[7]={0};//存储时间变量
void main()
{
Init_1602();//1602初始
P0 = 0xff;//关闭所有数码管
WE = 1;
WE = 0;
DU_L = 0;
TMOD = 0x01; //定时器工作模式配置
TL0 = T_1ms; //装载初始值
TH0 = T_1ms >>8;
TR0 = 1; //启动定时器
ET0 = 1; //允许定时器中断
EA = 1; //开总中断
Init_1302(SetTime);//1302初始化
while(1)
{
if(T_flag)//500ms定时
{
T_flag = 0;
GetTime(CurrentTime);//获取时间
str[0] = '2';
str[1] = '0';
str[2] = (CurrentTime[6] >>4)+'0'; //年
str[3] = (CurrentTime[6]& 0x0F)+'0';
str[4] = '-';
str[5] = (CurrentTime[4] >>4)+'0'; //月
str[6] = (CurrentTime[4]& 0x0F)+'0';
str[7] = '-';
str[8] = (CurrentTime[3] >>4)+'0'; //日
str[9] = (CurrentTime[3]& 0x0F)+'0';
str[10] = '�';
str[11] = (CurrentTime[2] >>4)+'0'; //时
str[12] = (CurrentTime[2]& 0x0F)+'0';
str[13] = ':';
str[14] = (CurrentTime[1] >>4)+'0'; //分
str[15] = (CurrentTime[1]& 0x0F)+'0';
str[16] = ':';
str[17] = (CurrentTime[0] >>4)+'0'; //秒
str[18] = (CurrentTime[0]& 0x0F)+'0';
str[19] = ' ';
str[20] = (CurrentTime[5] >>4)+'0'; //星期
str[21] = (CurrentTime[5]& 0x0F)+'0';
str[22] = '�';
Disp_1602_str(1,4,str); //将获得的时间分别显示到1602的第一二行
Disp_1602_str(2,3,str+11);
}
}
}
//定时器0中断子程序,定时1ms
void timer0() interrupt 1
{
static uint T_500ms = 0;
TL0 = T_1ms;//重装初始值
TH0 = T_1ms >>8;
T_500ms++;
if(T_500ms >=500)//500ms,置位T_flag
{
T_500ms = 0;
T_flag = 1;
}
}
将程序下查看结果是否与预想的一致吧。
15.3 突发操作模式
上面我们讲解的是以单字节的模式,从 1302 中连续读取时间数据。仔细的同学可能会发现一个问题,就是我们连续读 7 个时间寄存器是有先后顺序的,会有读错数据的风险。例如我们要读的时间为 23 时 59 分 59 秒,最开始时我们把 59 秒读出来了,如果刚好在你读完的时候 59 秒变成了 00 秒,59 分变成了 00 分,23 时变成了 00 时,接下来把分、时依次读出来,因此我们读出来的时间为 00 时 00 分 59 秒,很显然这个时间是不对的。下面我们讲解的突发操作模式有效的解决了这个问题。
在突发操作读模式下,当 DS1302 收到突发读数据指令,DS1302 首先会把 8 个时间寄存器的数据同时读出存放在 8 个二级时间寄存器中,然后依次把 8 个二级时间寄存器的数据输出给单片机,突发读专用指令为 0xBF。同样,当我们需要写 DS1302 时,当收到突发写指令后,DS1302 将接收到的 8 个连续数据存储到 8 个二级时间寄存器中,然后同时将 8 个数据写到时间寄存器中,突发写专用指令为 0xBE。根据上述原理,编写突发写模式和突发读模式函数如下代码所示。
//突发写模式
void WrBurst_1302(uchar *SetTime)
{
uchar j;
CE_1302 = 1;//拉高片选
WrByte_1302(0xBE);//Burst模式写专用指令
for(j=0;j<=6;j++)
{
WrByte_1302(SetTime[j]);//写入7位时钟数据
}
CE_1302 = 0;//拉低片选
}
//突发读模式
void RdBurst_1302(uchar *CurrentTime)
{
uchar j;
CE_1302 = 1;//拉高片选
WrByte_1302(0xBF);//Burst模式读专用指令
for(j=0;j<=6;j++)
{
*CurrentTime = RdByte_1302();//读取一个字节数据;
CurrentTime++;
}
CE_1302 = 0;//拉低片选
}
如上图所示,首先为向 DS1302 写入突发读或者写指令,然后紧接着是读取或写入 7 个时间数据。前面讲解的都是 8 个连续的数据,我们这里写 7 个的原因是,时间显示这 7 个就足够了。上述完整代码详见完整代码"Drive_DS1302.h"、"Drive_DS1302.c"中。
突发模式的应用与单字节模式类似,只需将如下代码中的for循环语句替换成“RdBurst_1302(CurrentTime)”即可。
//获取当前时间值
void GetTime(uchar *CurrentTime)
{
uchar j;
CE_1302 = 0;//初始化通信引脚
SCLK_1302 = 0;
for(j=0;j<=6;j++)
{
*CurrentTime = RdSingle_1302(0x81+2*j);//读取7个时钟数据
CurrentTime++;
}
//RdBurst_1302(CurrentTime); //当采用Burst模式时,使用此语句替代上面for循环语句
}
15.4 本章小结
本章详细介绍了实时时钟芯片DS1302的工作原理,驱动程序的编写,以及DS1302的简单应用。
-
单片机
+关注
关注
6044文章
44632浏览量
639433 -
微处理器
+关注
关注
11文章
2275浏览量
82856 -
时钟芯片
+关注
关注
2文章
254浏览量
40002 -
DS1302
+关注
关注
8文章
449浏览量
50874
发布评论请先 登录
相关推荐
DS1302实时时钟电路说明
实时时钟模DS1302程序列子
实时时钟电路DS1302的原理及应用
ds1302实时时钟
51单片机DS1302实时时钟驱动程序






 工商网监
工商网监
评论