 浅析自动曝光的相关问题
浅析自动曝光的相关问题
Sensor banding现象(这种现象有时候也被成为Flicker现象)如视频所示,画面会出现频闪,感觉有水波纹一样的纹路在跳变;
具体来说可能会有如下表现(这些表现并不一定会同时出现):
同一帧的不同行的亮度各不相同,存在亮暗变化的条纹,如上图所示;
不同帧的相同行的亮度不相同,出现视频中水波纹一样的纹路跳变;
前后帧的整体亮度存在差异,画面亮度出现明显的亮暗变化;
1-2、交流电变化规律
我们都知道交流电其实是一种正弦波,其频率有两种:50HZ和60HZ, 中国、泰国、印度、大部分欧洲国家等地采用50HZ,美国、加拿大、墨西哥等地采用60HZ。 下面以50HZ为例进行解释,交流电以1/50s,即20ms的周期进行变化,其变化规律如图所示:
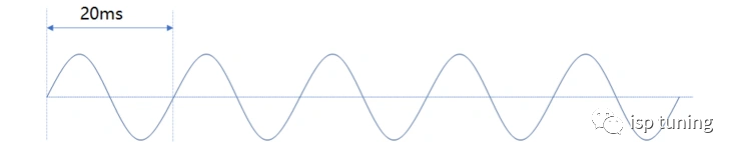
而对于能量来说,并没有正负之分,因此能量的周期是1/100s,即10ms。

因此,普通的以交流电为电源的白炽灯的亮度实际上在一直在以10ms为周期随着交流电变化而发生变化,只不过人眼感知不到画面亮度的变化罢了。
1-3、卷帘快门(Rolling shutter)
常见图像传感器Sensor有卷帘快门和全局快门之分:
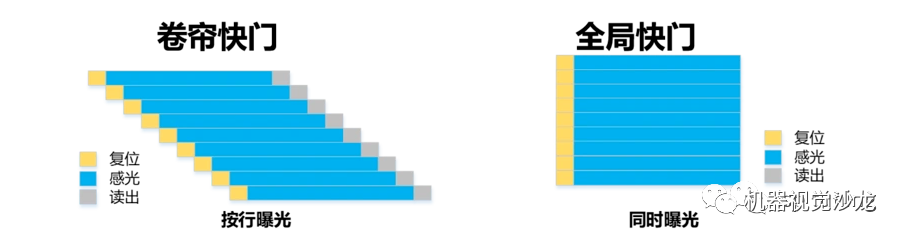
卷帘快门的特点是Sensor是一行一行进行感光的,并不是同时感光的,这就导致了不同行之间感光的时刻存在差异,
而感光的过程可以看成是对亮度进行积分,积分的大小直接决定了画面亮度。
如果在感光过程外界灯光亮度发生了变化就可能导致不同行感应到的亮度有差异,导致了banding现象,下面具体进行分析。
1-4、对不同filker现象的原因分析
对同一帧内的不同行进行分析
1>、曝光时间为10ms时
如图所示,假如第M行和第N行分别在 tm 和 tn 时刻开始曝光,曝光时间为都10ms,图中阴影部分的面积就表示该行的亮度
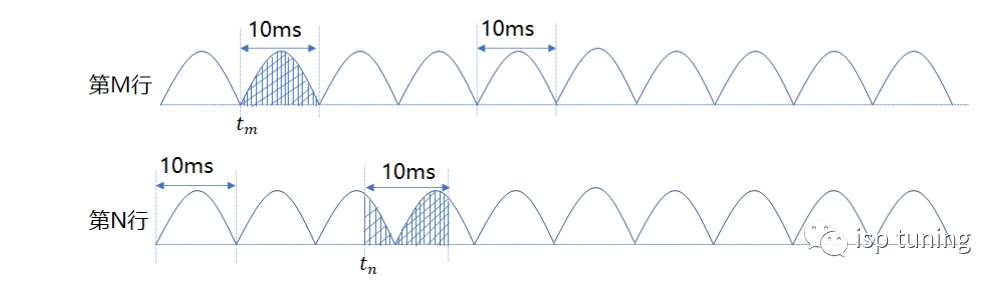
我们知道第M行的积分面积与第N行的积分面积是相同的,因为积分时间刚好是周期的整数倍,此时不同行的亮度是相同的,不会产生banding现象。
2>、曝光时间为8ms时
如图所示,假如第M行和第N行分别在 tm 和 tn 时刻开始曝光,曝光时间为都8ms,图中阴影部分的面积就表示该行的亮度
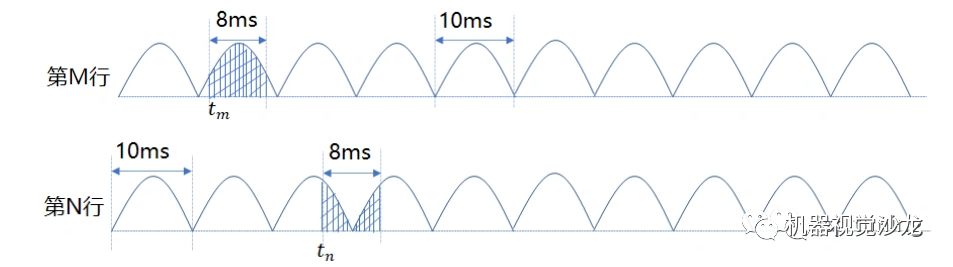
我们可以看出来第M行的积分面积(跨越波峰)大于第N行的积分面积(跨越波谷),
因此这两行的亮度就会有差异,在当前帧中就会出现不同行亮度不同的水波纹现象。
我们可以看出来第M行的积分面积(跨越波峰)大于第N行的积分面积(跨越波谷),
因此这两行的亮度就会有差异,在当前帧中就会出现不同行亮度不同的水波纹现象。
对不同帧的同一行进行分析
1>、假设,第M帧的第N行在 tm 时刻开始曝光, 第M+1帧的第N行会在tm+1时刻开始开始曝光,
如果此时的帧率为30FPS,每帧时间为为1/30s,即33ms。我们可以知道:tm+1 = tm+33ms
曝光时间为10ms时

如图所示,此时我们会发现,这两行的亮度是一样的,因此不同帧的亮度也是相同的,即画面亮度不会出现闪烁跳变;
2>、曝光时间为8ms时
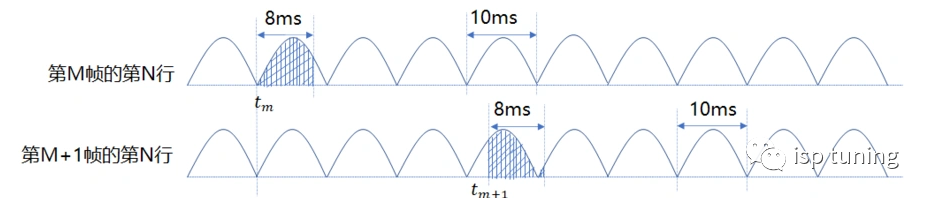
如图所示,第M帧的第N行的积分面积要大于第M+1帧的第N行的积分面积(经过谷底),此时不同帧的相同行亮度也会发生表现,
加上上面的分析,我们可以得知,在30FPS情况下,以8ms进行曝光时不仅会出现水波纹,而且水波纹还会滚动,出现上面视频中的表现。
3>、但是,如果此时以25FPS的帧率进行分析,每帧为1/25s,即40ms时,情况会变得不一样,此时:tm+1 = tm + 40ms

如图所示,由于40ms为周期10ms的整数倍,因此这两行的起始时刻相位是相同的,所以两行的积分面积是相同的,因此此时不会出现画面闪烁。
1-5、小结
这里可以给出结论:
当曝光时间为光源能量周期的整数倍时,不会出现banding现象;
当曝光时间不为光源能量周期的整数倍时,一定会出现不同行之间的亮度差异,即水波纹一样现象;但是水波纹会不会上下滚动还要看帧率;
当每帧时间(1/fps)为光源能量周期的整数倍时,不同帧之间的相同行不会出现亮度变化,即哪怕有水波纹也不会滚动,;反之水波纹会上下滚动;
1-6、 led灯的banding现象
分析完了普通白炽灯这些直接随交流电的频率进行亮度变化的灯,还有一类特殊的灯的banding现象与白炽灯不同,那就是LED灯,
因为LED并不是是随着交流电的频率变化的而是自身控制的,LED灯的频率并不固定,一般来说在90HZ~200HZ,不同的LED灯有不同的频率,
如图所示灯是90HZ(11.1ms),占空比为20%, 的LED亮暗示意图,当电平为高时LED灯亮起,当电平为低时,LED灯熄灭,
因此这里我们也可以看到为什么LED会节能呢?因为它大部分时间都不亮。
注:一个频率波形有信号与无信号的比值叫占空比 ;

那对于图像传感器来说,LED与普通白炽灯有什么区别呢?
白炽灯其实是一直亮着的,但是LED灯的大部分时间是灭的,因此采集图像时有可能会采集到LED灯灭掉的时刻,
比如ADAS相机如果采集到的红绿灯是灭的,那么ADAS算法也无法判断当前应该是停车还是直接走;
交流电的频率是固定的,要么50HZ,要么60HZ;但是LED灯的频率没有具体标准,
比如频率很低的警车上鸣笛的那个红蓝信号灯频率可以低到5HZ,而高频的LED灯可以达到200HZ,并没有一个固定的频率;
不过,分析方式是一样的,每一行的亮度取决于在该行曝光时间内的外界亮度的积分。这里以90HZ,占空比为20%的LED灯为例进行分析,
因为在车载领域,对LED banding有要求的也是大于90HZ的LED灯下无明显的频闪和水波纹。
2、过曝、曝光不足
调试过程:排除其他模块对亮度的影响(比如gamma、ltm、对比度等)确认是否是曝光参数导致的画面欠曝,过曝;
可 bypass 除ae外影响亮度的所有模块后,再去调整AE相关的曝光参数,使画面曝光正常;
3、AE震荡、亮度不一致、图像清晰度差
3-1、AE震荡
现象:图像亮度忽明忽暗
调试过程:查看当前实时曝光参数(曝光行、sensor again、isp gain),确认具体是哪个参数一直在变化 ;
尝试调整AE的相关控制参数 (曝光量、阈值、容错值、权重。。。),直到在该场景下,AE计算出的曝光参数值稳定为止;
若是isp gain导致,可以适当调整isp gain的值,或者当亮度满足要求时,直接不用isp gain也可;
3-2、同场景下图像亮度不一致问题
现象:当前环境亮度不变,假设为600lux,当将环境亮度从2lux调整到600lux 和从1000lux 调整到600lux两次对比,camera画面亮度不一致;
调试过程:比较两次的600lux场景下,计算出的曝光参数是否一致,若一致那就不是AE的问题;
可能和AE精度相关,可调小AE的容差值看看,但可能会带来AE震荡,根据实际需求去做调整;
3-3、图像清晰度差问题
现象:基于上面3-2的场景下,图像的清晰度有差异;
调试过程:确认两次的实时曝光参数值,一般是不在同一档的增益下了,下一档的去噪参数开的较大,清晰度就差了;
或者是两档增益的去噪参数值调的差距较大,不够线性 ;
4、曝光时间过长,导致的运动拖影问题
运动物体整个运行过程都是在cmos上成像的,所以当曝光时间长时,拍出的照片就有拖影,
只有当曝光时间足够快,物体相对于相机就是相对静止的,也就看不到有拖影了;
来源丨ISP Tuning
审核编辑:刘清
-
led灯
+关注
关注
22文章
1593浏览量
108743 -
图像传感器
+关注
关注
68文章
1936浏览量
129868 -
FPS
+关注
关注
0文章
35浏览量
12067 -
交流电
+关注
关注
14文章
675浏览量
34270 -
ADAS系统
+关注
关注
4文章
226浏览量
25812
原文标题:自动曝光相关问题分析
文章出处:【微信号:机器视觉沙龙,微信公众号:机器视觉沙龙】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
DLP6500FYE所支持的曝光时间范围为多少?
555组成的自动曝光定时电路
浅析自动水分测定仪的特点
如何用labview修改一个摄像头的曝光时间
【威雅利 汽车】苹果最新专利曝光,要把VR和AR带进自动驾驶汽车
CCD半自动曝光机系统,自动对位操作简单
相片曝光定时器相关资料下载
深圳CCD半自动曝光机系统有哪些特点及参数?
浅析影响白光LED光衰的相关材料
浅析运放补偿电容的作用及相关知识





 工商网监
工商网监
评论