 车辆中的标定概述
车辆中的标定概述

标定概述
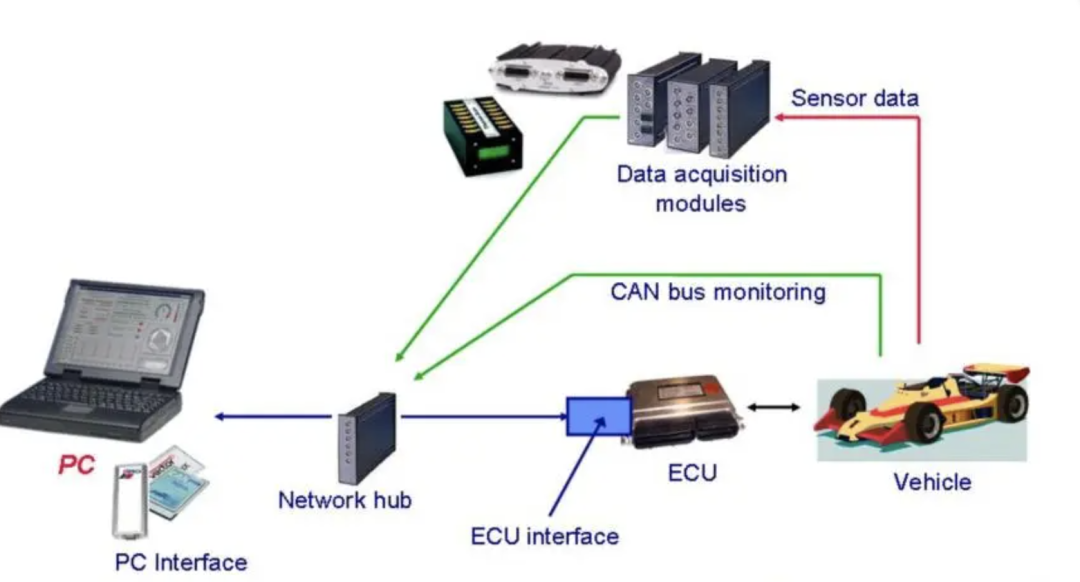
我们先看一张图,做过调试的同学额应该很熟悉,出问题了,要实车调试,我们带着电脑和canoe下去调试了。只不过这张图是讲标定的,我们通过can或者以太网接口卡,把标定参数刷到我的Ecu中,我们的Ecu采集数据到远程服务器供我们分析我们调参的好坏。
那么什么是调参呢?
调参就是优化或调整控制算法中的某些参数以获得系统最佳效果的过程。我们通过校准工具(比如网络接口卡can盒子和canape)访问 ECU中的校准变量并进行更改,注意我们要校准的那些参数都被分组到 ECU 内存的一个特殊部分,称为校准内存。我们通过校准工具来访问这块内存。
标定协议
那么校准工具肯定要通过某种协议来访问这块内存,我们称这种协议为XCP(CAN Calibration
Protocol)协议,基于can总线的就叫ccp。顾名思义,它是一种用于电子控制单元(ECU)的校准和数据采集的协议。
CCP 是 CAN 2.0B(11 位或 29 位 CAN id)的应用层。根据 OSI 模型,该协议是顶层(第 7层),这意味着该协议不描述位和字节是如何创建的,而是使用 CAN 2.0B 协议物理层、数据链路层和网络层。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
汽车电子
+关注
关注
3048文章
9195浏览量
173345 -
CCP
+关注
关注
0文章
22浏览量
11709
发布评论请先 登录
相关推荐
热点推荐
基于摄像机标定的车辆速度检测方法
提出了基于平面单应性矩阵的摄像机标定算法,通过摄像机标定对检测区域进行网格划分,从而进行车辆速度的检测。经实验测试,该方法易于实现,且具有较高的检测精度,平均测速准确率
发表于 11-10 14:35
•51次下载
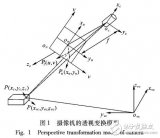
基于透视变换的车辆位置和方向提取方法
利用快速标定模型进行了车载成像装置的标定,研究了基于导引标志的车辆位置和方向参数提取,其中改进了一种基于透视变换提取车辆位置方向的方法,即利用图像中
发表于 02-08 15:46
•31次下载

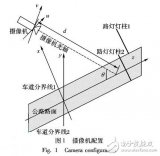
用于视频中车速自动检测的摄像机自动标定方法
针对目前基于视频的车辆测速方法均需通过手工标定而造成的低效和可操作性差的问题,提出了一种对典型配置的道路监控摄像机的焦距、俯仰角、离地距离等重要参数进行自动标定的方法。首选利用自然场景中
发表于 11-29 16:47
•0次下载
基于梯形棋盘格标定板对激光雷达和摄像机联合标定方法
针对无人车(UGV)自主跟随目标车辆检测过程中需要对激光雷达(LiDAR)数据和摄像机图像进行信息融合的问题,提出了一种基于梯形棋盘格标定板对激光雷达和摄像机进行联合标定的方法。首先,
发表于 11-30 16:23
•7次下载
相机标定的逻辑和学习资料详细概述
相机标定可以说是计算机视觉/机器视觉的基础,但是初学者不易上手,本文将给读者整理一遍相机标定的逻辑,并在文末回答评论区提出的问题。分为以下内容:

手眼标定常用的标定方法有:九点标定
在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指

基于模型的标定软件xCAL介绍
xCAL是一个基于模型的标定软件,它将FEV的标定工程经验集成到易于使用的工具中。该软件使得强大的DoE技术易于应用,并结合车辆开发的需要,针对通用DoE方法进行了定制化的调整。
常用的标定方法:九点标定
在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指
摄像机标定和立体标定
由于OpenCV中cvStereoCalibrate总是会得到很夸张的结果(见下文5.1问题描述),所以最后还是决定用Bouguet的Matlab标定工具箱立体标定,再将标定的结果读入
自动驾驶系统中摄像头相对地面的在线标定方案解析
本文采用了一种从粗到精的方法,在车辆行驶在道路上时,通过因子图优化获取地面特征并优化相机到地面的标定参数,而无需使用任何特定的标定目标。
发表于 06-20 09:36
•1372次阅读

常见的机器人视觉伺服中的标定技术有哪些
常见的机器人视觉伺服中要实现像素坐标与实际坐标的转换,首先就要进行标定,对于实现视觉伺服控制,这里的标定不仅包括摄像机标定,也包括机器人系统的手眼标
发表于 08-04 11:48
•1444次阅读




评论