 详解CAN总线的AUTOSAR网络管理报文
详解CAN总线的AUTOSAR网络管理报文
1、什么是AUTOSAR?
官方一点:AUTOSAR 就是AUTomotive Open System ARchitecture的简称,中文翻译就是汽车开放系统架构。
直白一点:将汽车电子控制单元(ECU)的软件底层做了一个标准的封装。使得大家都能共用一套底层软件,只需要修改其中的一些参数,就可以匹配不同硬件,也可以匹配不同的应用层软件。如此之后,用户只需要专心负责应用层功能开发即可,底层都交给AutoSAR工程师就行了。
再直白一点:“就是一套写的比较好的底层软件”。其实现了硬件驱动的封装(类似于STM32的库),实现了操作系统的功能。用户只需要开发操作系统上层的软件应用即可(类似于基于安卓开发App)。
再再再直白一点:各个厂家在五花八门的硬件上随意开发,想怎么写就怎么写,怎么爽怎么来,导致开发一时爽,维护火葬场,如果底层硬件换掉了,上面的代码基本就要全部推倒重来,而且不同厂家之间的代码移植性也几乎没有,各个厂家和工程师都很头大,于是AUTOSAR应运而生。AUTOSAR将各个硬件的底层接口做了封装,以后如果换硬件,只需要配置一下AUTOSAR,告诉它我换硬件了,赶紧给我适配就可以了,上层代码完全不需要改动就可以使用。从开发的角度来讲,提高了代码的复用性,降低了代码的复杂度,提高了代码的可维护性。
2、什么是网络管理?
网络管理的目的是使网络中的ECU节点有序的睡眠和唤醒。在没有通信需求的时候睡眠,在需要通信的时候唤醒,可以节约汽车电池的电量。
3、什么是CAN总线?
这个CSDN和知乎都有很多的介绍,这里就不赘述了。
4、CAN总线的AUTOSAR网络管理报文(以下简称NM报文)长啥样?
首先要明确一点,NM报文就是CAN报文。NM报文符合CAN报文的格式,由帧起始、仲裁场、控制场、数据场、CRC场、应答场、帧结尾组成。
一般厂家在设计的时候会规定好NM报文的ID范围。
举个例子:规定标识符在0x500到0x5FF范围为NM报文。当在CANoe中抓取到此ID范围内的报文,那就是NM报文。
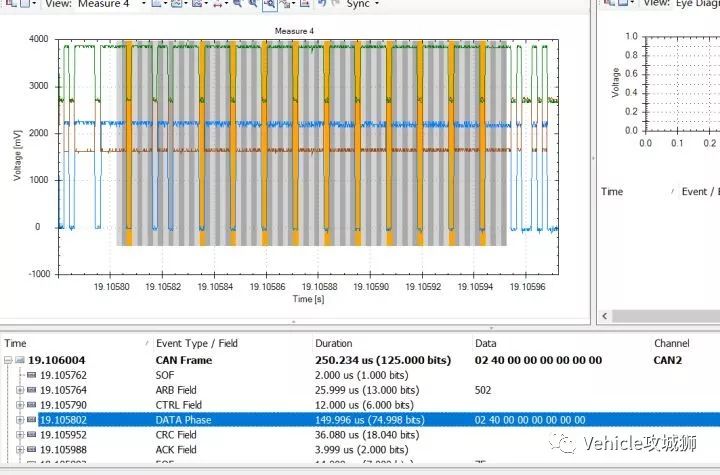
此报文ID=0x502,那么它就是一帧NM报文
NM报文数据场
NM报文的重点在于数据场8字节里的内容:

NM报文数据场内容格式
Byte0:这里填的是ECU的地址,或者叫ECU的ID;
此报文的ID=一个基础值+ECU的ID,例如厂家规定基础值为0x500,那么此报文的ID=0x500+0x8=0x508;
这里要注意区分报文的ID和ECU ID的概念,很容易混淆;
Byte1:
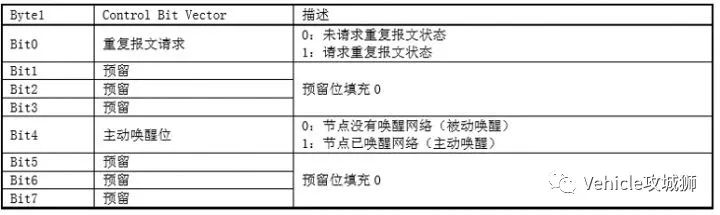
NM报文数据场byte1格式
这里关注下bit0和bit4:
bit0:当此位置1时强制进入RMS(下面会讲到);
bit4:告诉其他节点自身是怎么被唤醒的。
置0:被动唤醒、远程唤醒,比如被其他节点发送的NM报文唤醒;
置1:主动唤醒、本地唤醒,比如给ECU上电;
byte2-byte7里的user data数据由用户自行定义。
5、CAN NM状态介绍
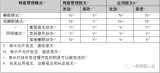
AUTOSAR网络管理有三种状态:
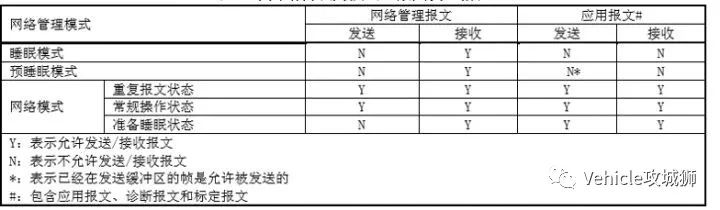
睡眠模式(Bus-Sleep Mode):当节点没有本地网络唤醒以及远程唤醒请求时,ECU通讯控制器切换至睡眠模式,ECU功耗降低至适当水平;此模式下,NM报文只收不发,APP报文不收不发,当出现有效唤醒源时必须要被唤醒;
预睡眠模式(Prepare Bus-Sleep Mode):这个状态是为了等待总线上的所有节点能够在进入Bus-Sleep Mode之前有时间停止节点的active状态(如清空队列中为发送的报文);此模式下,NM报文只收不发,APP报文不收不发,如果缓冲区有APP报文那可以继续发完;
网络模式(Network Mode):
包含3个子状态:
重复报文状态(Repeat Message State):NM报文可收可发,APP报文可收可发;
正常工作状态(Normal Operation State):NM报文可收可发,APP报文可收可发;
准备睡眠状态(Ready Sleep State):NM报文只收不发,APP报文可收可发;
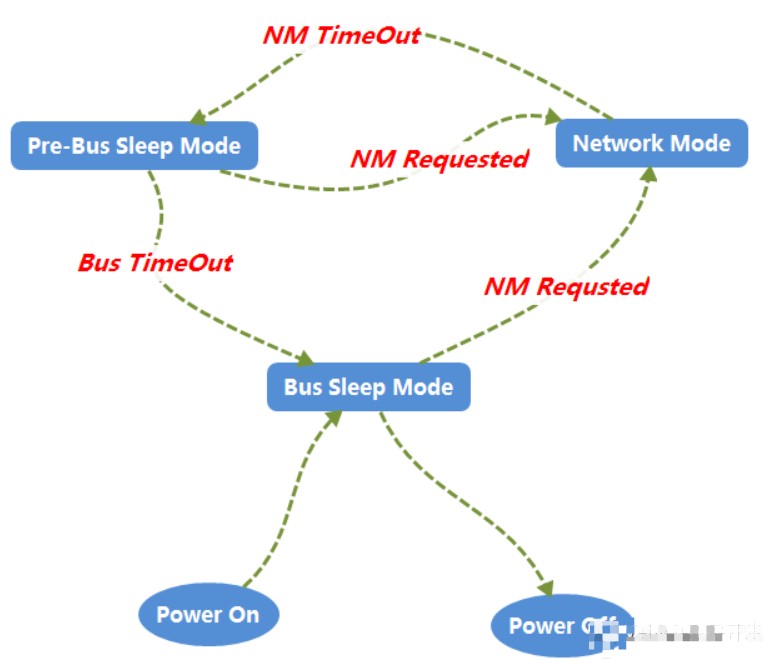
总结见下图:
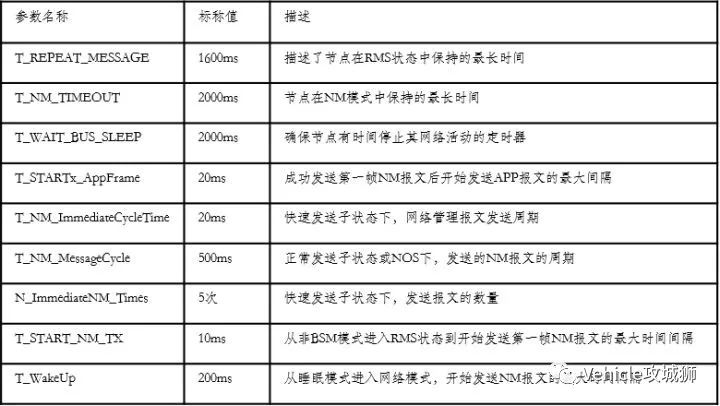
6、定时器及参数介绍
第5小节和第6小节的内容看一遍可能理解不了,学完下面的状态迁移图,再回过来多看几遍就能理解了。
7、状态机
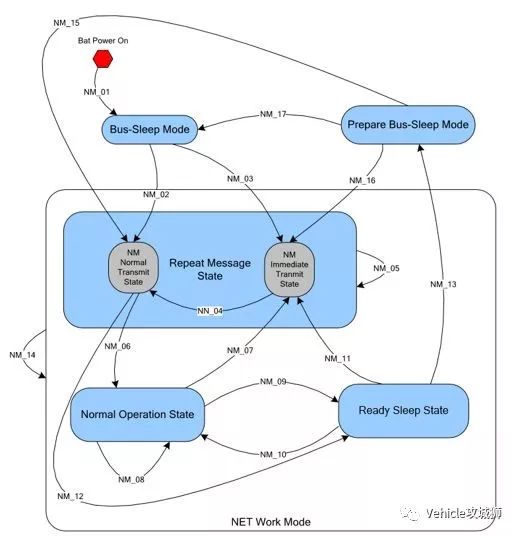
现在终于来到AUTOSAR网络管理的最难理解也是最容易使人秃头的状态机了,这里我不打算把每一条状态转换的文字描述直接贴上来,跟着我的思路,我们来一个一个看吧。
在开始之前,先了解一下各种缩略语:
BSM-睡眠模式 NM-网络模式 PBM-预睡眠模式
RMS-重复报文模式 NOS-正常操作状态 RSS-准备睡眠模式
01:给ECU上电,ECU自己就会初始化进入睡眠模式。如果没有唤醒源来唤醒此节点,那就会一直待在睡眠模式。
02+03:当出现本地唤醒(03)或者远程唤醒(02)时,进入RMS状态。这里再解释下,本地唤醒就是我自己想要主动和其他节点通信;远程唤醒是其他节点想要和我通信。
04:我们现在已经走到网络模式的重复报文子状态了。话说为什么叫重复报文子状态呢,因为在这个状态里的时候,ECU需要一直发送周期报文,来告诉别人:我在线,性感ECU在线陪聊,你再不来找我我就要开始想念你......
如果是走03(本地唤醒)进来的,那么需要先在NM Immediate Transmit State中以很快的周期发送N帧报文(例:以20ms的周期连续发送5帧报文),发完这N帧报文再进入到NM Normal Transmit State中以正常的周期发送报文(例:500ms为周期发送报文。这个在上面的表格里有定义)。如果是直接走02进来的,那么直接以正常周期发送NM报文就可以了。一直发到T_repeat_message定时器超时。
这一步的目的是如果是本地唤醒的话,可能此ECU下面还有很多从属节点,当此ECU唤醒之后,需要同时唤醒其他兄弟节点一起通信,所以最开始的N帧报文周期很短,目的是为了快速、低延迟地唤醒其他节点。为什么被远程唤醒就不需要这一步呢?欢迎大家在评论区里一起讨论~
06+12:且慢,我们先来计算一下从BSM到这一步花费了多少时间了。参考上面定时器的定义,在02或03中,最大唤醒时间为T_wake_up=200ms;在04中,T_repeat_message=1600ms。总计1800ms,差不多为2s的时间,此时ECU有可能已经不需要通信了(2019-11-29补充:ECU持续处于唤醒状态的条件是有持续的唤醒源,例如一直有NM报文远程唤醒、或一直有本地唤醒源例如上电)。如果还需要继续通信,走06,进入NOS,继续周期发送NM报文,可以收发APP报文,当不再需要通信了,就停止发送NM报文,等待T_NM_timeout超时之后走09;如果直接不需要通信了,直接走12。
10:收到本地唤醒,进入NOS。
11:收到NM报文的byte1字节的重复请求位如果置1,强制进入RMS。
08+14+05:T_NM_timerout定时器超时,不改变当前状态。定时器需要重置。
13:在RSS状态,NM报文不可以发送。等待T_NM_TIMEOUT定时器超时后进入PBM。
15+16:PBM状态只可以接收NM报文,其他报文不发不。收到远程唤醒,走15;收到本地唤醒,走16。
17:如果PBM状态收不到任何唤醒源,在T_WAIT_BUS_SLEEP定时器超时后进入BSM。
以上就是CAN总线AUTOSAR网络管理的内容分享。
来源:汽车自动驾驶技术
审核编辑:汤梓红
-
CAN总线
+关注
关注
145文章
1926浏览量
130605 -
汽车电子
+关注
关注
3023文章
7840浏览量
166138 -
网络管理
+关注
关注
0文章
118浏览量
27645 -
AUTOSAR
+关注
关注
10文章
350浏览量
21454 -
ecu
+关注
关注
14文章
877浏览量
54384
原文标题:一文搞懂CAN总线的AUTOSAR网络管理
文章出处:【微信号:谈思实验室,微信公众号:谈思实验室】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
AUTOSAR CAN网络管理
CAN总线报文记录产品简介
AUTOSAR信息安全框架和关键技术相关资料介绍
《振南电子STM32视频教程》第十三讲:CAN总线

AUTOSAR CAN网络管理报文的数据场格式
AutoSAR中CAN通信网络管理的概述





 工商网监
工商网监
评论