 3M机器人自动化打磨取得成功,需要考虑哪些要素?
3M机器人自动化打磨取得成功,需要考虑哪些要素?
研磨和抛光作业中,机器人自动化应用凭借优异的效率和一致性效果,被越来越多生产者纳入升级计划。但要实现最终有效的自动化打磨,需要细致的机器人单元设计,进行大量实践工作。
3M机器人专家依托多年来的研磨行业经验,总结出机器人自动化打磨单元设计需考虑的一系列技术因素。今天小编就为大家分步拆解,助您的产线释放自动化“磨”力。
机器人有效载荷
机器人的有效载荷是运行中它将承载的最大重量加上它将施加的力。承载的重量包含与机械臂相连的一系列物项:力控和视觉系统,磨料或抓取的元件,被操控的部件等。因此一定要保证机器人的额定能力高于预期有效载荷。因为如果机器人在最高有效载荷下运行,可能会限制加速及灵活性。机器人单元的占地空间会随着机器人有效载荷及尺寸的增加而增加,所以在设计您的系统时需要注意空间上的限制。
辅助设备的类型
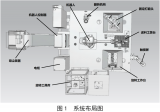
除了机器人,一套机器人单元还包括许多辅助设备,它们在工艺作业中不可或缺。比如落地式打磨机(如砂带机),台式打磨机(如砂轮机),抓取设备,测量与检验设备等,以及零件架。他们都会增加机器人单元的占地空间和前期成本。
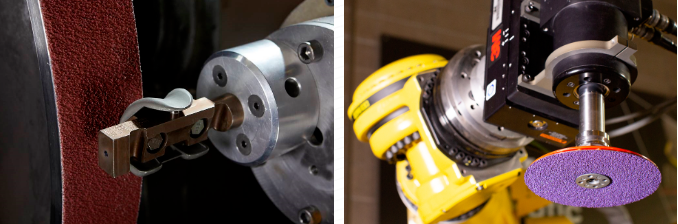
落地式砂带机
落地式砂带机
抓取设备及零件架
辅助电机的马力
类似于机器人的有效载荷,辅助设备上的电机也一定要有足够功率,以便执行所需应用。而牢记电机的工作周期(电机的不间断运行时间)也很重要。如果忽略这些重要因素,有可能招致频繁的电机更换,增加成本。
电机转速与磨料性能
每一种磨料都与具体应用密切相关,并且针对特定速度下运行而设计。以最合适的速度运行磨料对于在磨削过程中获得理想结果而言至关重要。例如,纤维砂碟在负载下运行得太慢就很难发挥其优势,因此要确保设备能够以最优速度来运行磨料。若运行速度太慢,磨料性能将受影响。
随着磨料的使用,性能也会发生变化。例如,砂带的性能通常会随时间推移而发生变化(因为研磨颗粒会消耗),砂轮的表面速度将会随磨损而下降(因为直径会减小)。表面速度的下降会影响磨料性能,而一台可以设置变速的电机能够对这些变化作出补偿。
3M研磨专家贴士
TIPS
注意,虽然磨料性能最终会随着矿砂消耗下降,但不同磨料的选择依然大有不同。
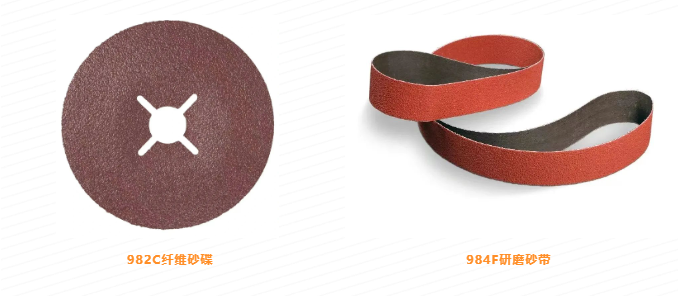
3MCubitronII系列产品使用3M精密成型矿砂,锋利一致的三角形矿砂在研磨中断裂出新的尖角,保持锐利继续参与打磨,比普通矿砂更加耐耗,减少磨料性能变化对自动化打磨的影响。

3M精密成型矿砂
比如含有3M精密成型矿砂的982C/982CX Pro纤维砂碟,以及CubitronII研磨砂带系列,就是非常适合机器人自动化打磨应用的磨料。
管理磨料的更换
由于磨料会随着时间推移而磨损,您的机器人需要考虑到切割效率或砂轮直径的变化。随着切割速度的下滑,可以对机器人进行编程以增大作用力或转速,进而完成补偿。
同时,需要考虑磨料更换的工艺,大多数情况下,该过程可以完全自动化或半自动化进行操作。
多步骤过程中的操作顺序
需要确定机器人单元中的最佳操作顺序是什么——机器人将要抓持工件还是磨料?
若机器人操作的是工件,那么这一系列磨削步骤可能只需要让机器人将工件带到多台研磨机。若机器人操纵的是磨料,您可选择使用换料工具,从而让机器人针对不同的步骤抓取正确的磨料。

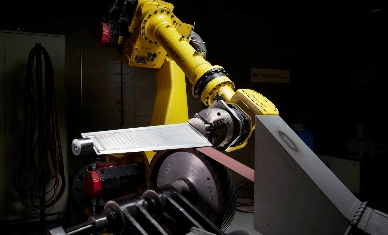
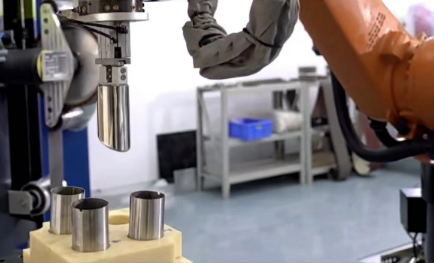
机器人抓取工件

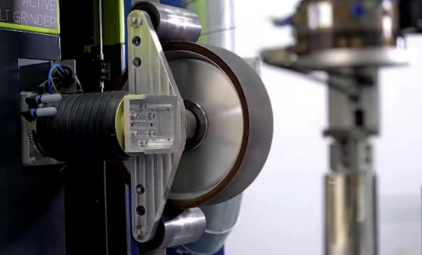
机器人控制磨料
粉尘收集
如同手动磨削操作一样,您需要考虑解决机器人单元中的集尘问题。无论是采用湿式还是干式集尘方法,必须要减少机器人单元中的粉尘,以确保电机最佳表现和成品工件清洁度。若不考虑集尘,粉尘将会快速积聚,导致不得不停工进行机器人单元的清洁及其零部件的维护工作。
3M研磨专家贴士
TIPS
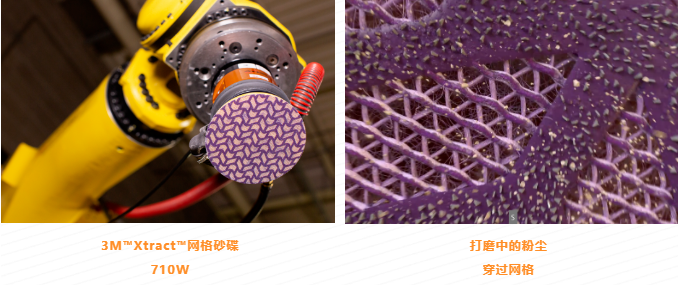
3M全新Xtract 网格砂碟系列,精密成型矿砂和专业孔型的结合,减少粉尘的堆积,为机器人自动化打磨提供了新的选择。
力量控制与感应系统
不同于操作员,机器人无法感应到环境并根据需要作出判断与调整。因此必须对其进行编程设置,使其沿特定路径行进并开展重复性运动。
如果没有力量控制,很难在磨削过程中取得一致的结果。大多数磨料都是在特定的压力范围内才有最佳表现。与仅采用机械臂位置控制相比,力量控制可以让机器人施加更加可控的力。
同样地,视觉系统允许机器人根据外部因素作出过程调整。这些系统可检测到进入部件的方位并调整机械臂末端的抓手,从而正确拾取部件。
温度测量设备作为不太常见的感应技术,在某些情况下能扮演重要角色。一般用于热敏性基材,并用于测量部件的温度,以免基材过热。
3M研磨专家贴士
TIPS
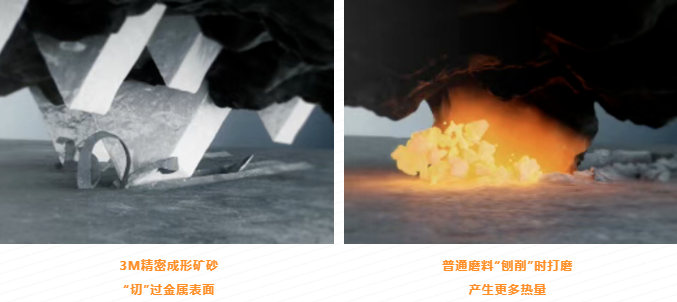
3M精密成型矿砂切削式打磨,相比形状不规则的普通矿砂“刨削”式打磨,更减少热量堆积。比如984F砂带冷切削的特性,尤其适合热敏金属的打磨。
再抓取需求
当需要让一个部件的多个表面朝向磨料时,可能要多次放下并拾取一个工件。若工艺过程中是将工件带到磨料处,那么再抓取可能会对循环周期有着重大影响。机器人需要重新抓取每个部件的次数越多,对周期时间的影响也就越大。同时,还需要考虑抓力大小。机器人末端的抓手必须具备足够强度以应对施加力才能完成部件的正确夹固。例如,轻型抓手将无法在高压机器人应用(如浇口研磨)中完成部件的正确夹固。
机器人持工件进行浇冒口打磨
操作人员安全
您的操作人员将偶尔需要对机器人作出干预——更换磨料,清除切屑,或其他临时工作,必须考虑人员的安全。机器人单元设计期间,应考虑到“上锁挂牌”规程,机器人防护设备,以及其他保障安全的方法(如联锁和接近开关)。
设计完备自动化的过程颇具挑战。如果能够从以上关键因素出发,进行周全的考虑设计,成功的可能性将大大提高。当然,建立机器人打磨单元之后,需要更多的测试、验证和调整优化,正确磨料及打磨方式的选择也是影响后续效率的主要因素。3M在机器人自动化打磨应用方面的专业经验和产品就能为您提供充分支持。
-
机器人
+关注
关注
211文章
28418浏览量
207100 -
自动化
+关注
关注
29文章
5578浏览量
79281
原文标题:3M | 机器人自动化打磨取得成功,需要考虑哪些要素?
文章出处:【微信号:im_robotic,微信公众号:机器人在线订阅号】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于工业机器人与PLC的自动化打磨集成工作站
2016年德国机器人及自动化技术贸易博览会
2016上海工业自动化及机器人展览会
2017深圳自动化机器人展-展会资料在线分享
再牛的自动化车间都不能缺少搬运机器人
机器人冲压自动化生产线剖析设计要点
焊缝跟踪:自动化机器人实时焊缝跟踪寻位
2020第十届深圳国际工业自动化及机器人展览会
平板电脑取得成功应具备的10大特征
打破传统:KUKA机器人在打磨与抛光领域的全新自动化应用
瑞萨收购Dialog的交易能否取得成功?

探索机器人对打磨自动化难点的技术





 工商网监
工商网监
评论