 智能混合动力系统仿真测试平台开发
智能混合动力系统仿真测试平台开发
硬件在环测试与实车测试是用来验证和优化自动驾驶感知、控制算法的主要技术。自动驾驶汽车引入了大量新技术,在这些技术完全成熟之前需要进行大量测试对自动驾驶算法进行预先评估。传统的实车测试是一种费时费力且成本高的测试方法,且只能进行有限数量的场景测试。相比之下,硬件在环测试可以使用和实际车辆高度一致的仿真传感器、车辆模型和丰富的交通场景,为自动驾驶算法提供了一种经济效益和测试效果更加均衡的测试条件。因此,硬件在环测试逐渐成为了自动驾驶汽车研发的强制性步骤。
本自动驾驶仿真测试平台搭载驾驶模拟器、自动驾驶与整车控制器、传感器与整车动力系统等硬件设备,以及远程通信设备接口,为后续实车实景测试、远程遥控驾驶、云控驾驶、数字孪生等功能的实现奠定了基础。本平台的虚拟模型构建主要通过Prescan&Matlab联合仿真实现。平台整体架构可划分七个部分,包括驾驶场景构建、车辆模型构建、传感器与红绿灯仿真、环境/仿真通信接口、控制器快速开发、以及驾驶模拟器等模块。
// 驾驶场景构建 //
驾驶场景可分为静态驾驶场景与动态驾驶场景。其中,静态驾驶场景可通过以下三种方式实现:1.根据实验需求,直接拖动Prescan道路模块构建理想状态下的静态驾驶场景;2.导入现有地图数据,生成普适性驾驶场景;3.根据自车运行轨迹构建个性化驾驶场景。动态驾驶场景构建则通过Prescan&Matlab联合仿真生成高逼真的虚拟交通参与者和行为风格、天气变化等。

图1卓越工程师学院仿真场景(大曲率弯道和大坡度环境)

图2大学城周边仿真场景(城市环境)
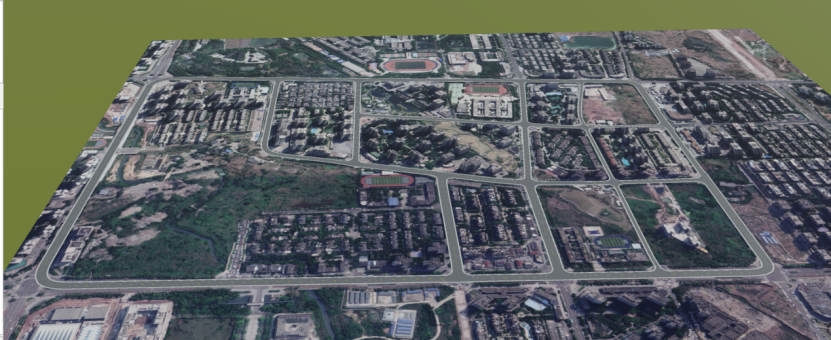
图3重庆大学虎溪校区周边仿真场景(城市环境)
在人机驾驶混合交通环境下,人机相互作用关系、交通流呈现的状态,以及交通控制技术的适应性等现实问题是亟需探讨、研究的。因此,本平台还支持交通流仿真,可研究交通干扰信息对本车驾驶行为的影响,以及协同式驾驶策略。所搭建的交通流仿真场景如下视频所示。
// 车辆模型构建 //
车辆模型是自动驾驶算法测试的重要基础,主要包含车辆动力学模型、动力系统模型、动力电池及电池管理模型、车载空调及热管理模型等多个系统。将这些被控对象模型参数化后,即可将真实的驾驶控制、能量管理、热管理等系统集成到仿真平台中进行测试。
其中,能量管理策略模块、换挡策略模块涉及到动力系统的控制策略,需要单独考虑,由核心层的控制逻辑部分来设计完成。而动力传动系统,加上电机、发动机、电池等动力源在内,模型采用模块化的建模方法,按照动力或者能量传递环节,将其划分为各个相对独立的子模块。根据每个环节的物理过程(如动力传递过程、能量转换过程),建立子模块的模型,再由这些子模块有机连接形成一个完整的模型,如图4所示。
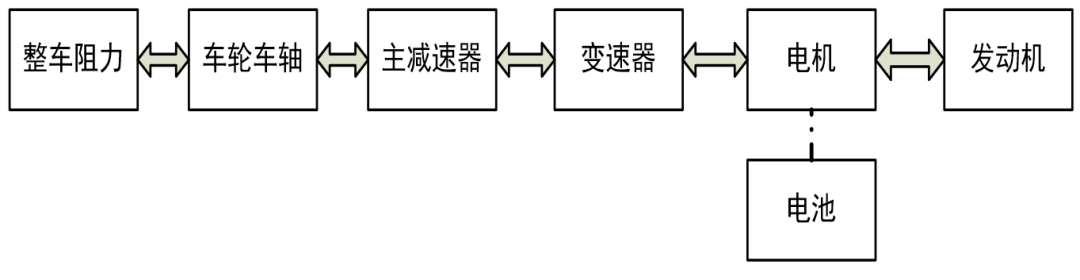
图4子模块连接示意图
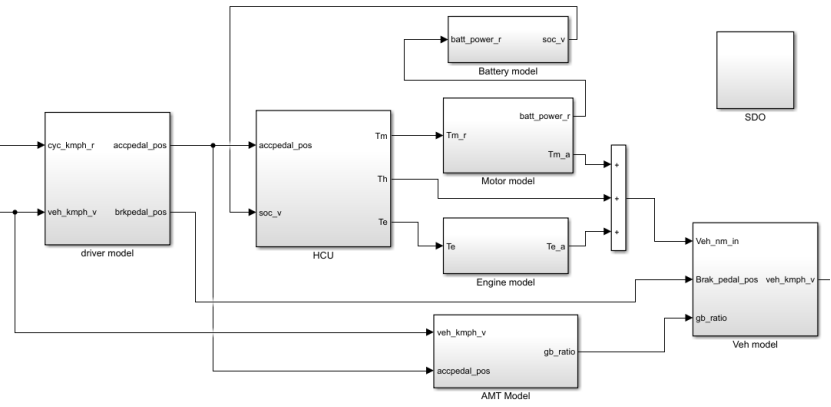
图5系统闭环仿真模型
— —车辆动力学模型
在自动驾驶与动力系统控制中,车辆模型的建立和分析是进行控制器设计的基础。
(1)车辆纵向行驶方程如下:

其中,

为滚动阻力,
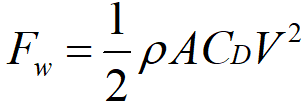
为空气阻力,
为坡度阻力,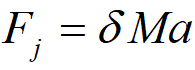 加速阻力。式中,M为汽车质量,
加速阻力。式中,M为汽车质量, 为坡度,
为坡度, 为旋转质量系数;f为滚动阻力系数,A为汽车迎风面积,
为旋转质量系数;f为滚动阻力系数,A为汽车迎风面积, 空气阻力系数,
空气阻力系数, 为空气密度。
为空气密度。
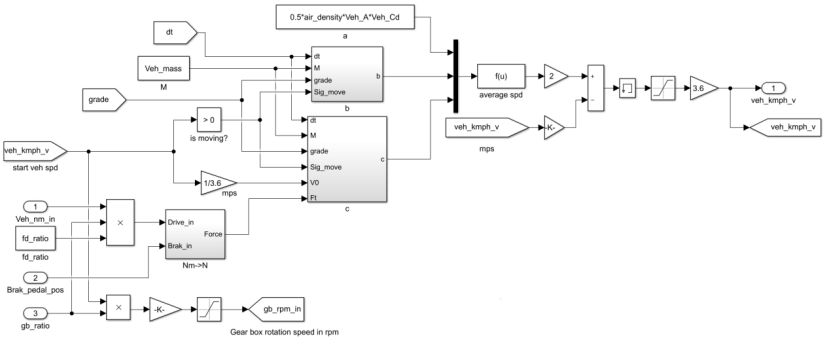
图6车辆纵向运动仿真模型
(2)车辆横向采用二自由度动力学模型,具体可参阅公众号相关文章(车辆二自由度动力学模型建模及其离散化应用),在此就不再赘述。
图7车辆动力学仿真模型
(3)轮胎模型
在进行车辆动力学仿真时,轮胎所受的垂直力、纵向力、侧向力和回正力矩对汽车的平顺性、操纵稳定性和安全性起着重要作用。由于轮胎结构复杂,动力学性能呈非线性,选择符合实际又便于使用的轮胎模型是建立车辆模型并进行动力学仿真的关键。主要的轮胎模型可以分为理论轮胎模型、经验轮胎模型和物理轮胎模型等。
其中,Pacejka提出的以魔术公式( Magic Formula,MF)为基础的经验轮胎模型,运用三角函数的组合公式拟合轮胎试验数据,描述轮胎的纵向力F1、侧向力Fe、回正力矩Mz、翻转力矩Mx、阻力矩My与侧偏角α、滑移率s之间的定量关系,以及纵向力、侧向力的联合作用工况,能够表达不同驱动情况时的轮胎特性。魔术公式的一般表达式为:

式中,系数B、C、D依次由轮胎的垂直载荷和外倾角确定,B为刚度因子,C为形状因子,D为峰值因子,E为曲率因子。Y为输出变量,可以是纵向力F1、侧向力Fe、回正力矩Mz。x为输入变量,在不同的情况下分別表示轮胎的侧偏角α或纵向滑移率s。
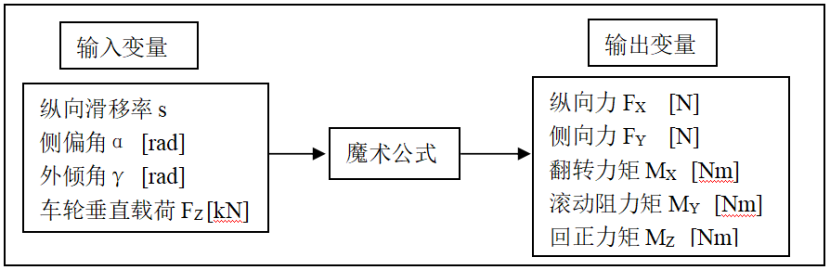
图8 基于魔术公式的轮胎模型
在侧偏角及纵向滑移率较小时,轮胎力可以用线性函数近似描述。这在侧向加速度ay⩽0.4g的情况下对常规轮胎具有较高的拟合精度。在这个线性区内,可用以下算式得到轮胎的纵向力和侧向力:

式中,Cl为轮胎纵向刚度,Ce为轮胎侧偏刚度。
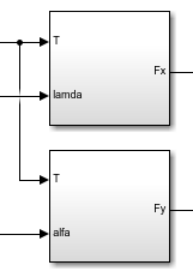
图9轮胎仿真模型
——变速器模型
主减速器传递着车轮/车轴和变速器之间的功率,在传递的过程由于摩擦的存在,有一定的机械效率,从而造成一定的功率损失。主减速器模块的框图如图10所示。
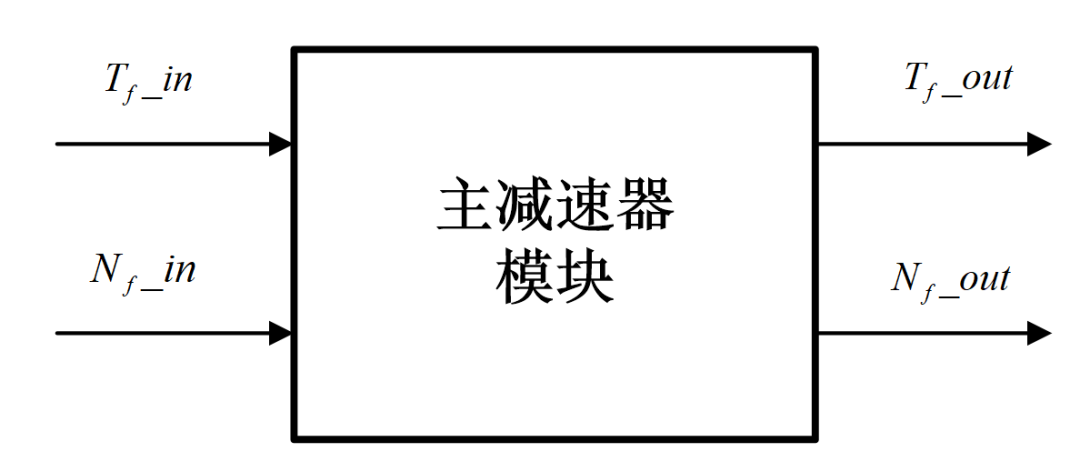
图10主减速器模块框图
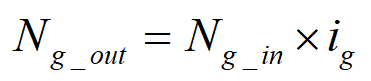
主减速器模块的输入转矩转速为通过车轮车轴模块计算得到请求转矩转速,输出为主减速器需要从变速器得到的转矩转速。首先根据传动比计算转速,公式如下:
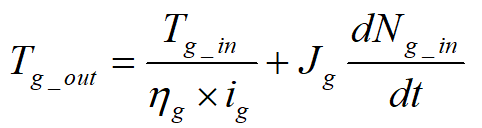
然后根据主减速器的效率,计算输出的转矩,公式如下:
变速器在混合动力系统中要完成的任务是根据汽车行驶的需要,以不同的速比改变发动机到车轮上的扭矩和转速,使其满足汽车行驶的动力要求,并调节发动机的工作点。变速器模块框图如图11所示。
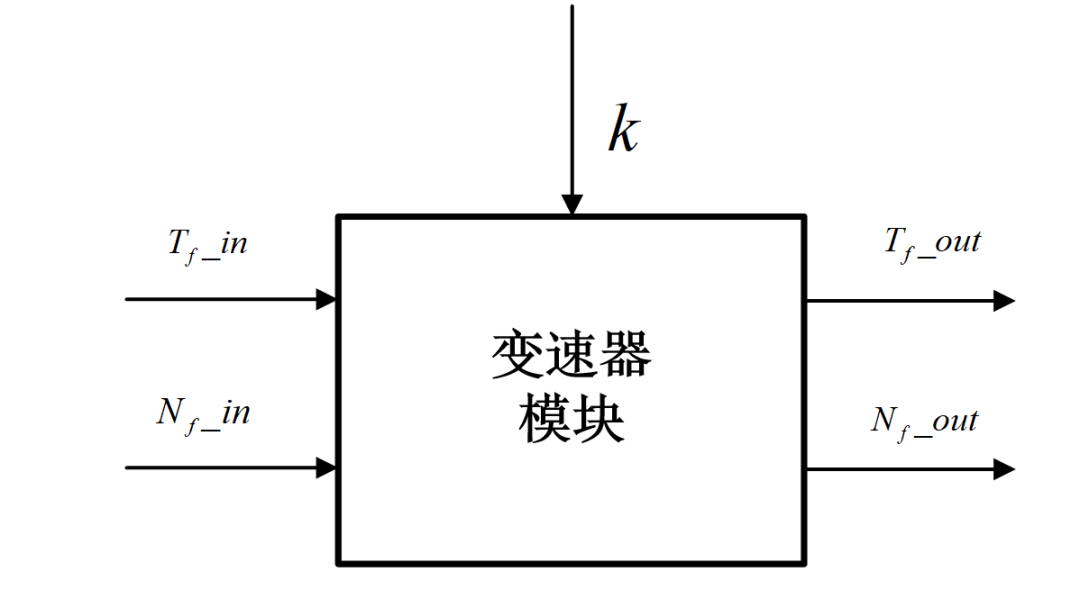
图11变速器模块框图
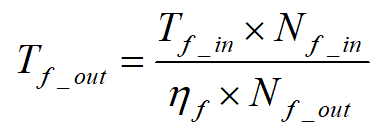
其中k为变速器的挡位信息,包括变速器各挡的传动比和机械效率等,由换挡策略决定。通过主减速器模块计算得到的转速和转矩请求输入至变速器模块,变速器模块根据转速请求计算其输出转速即从动力总成得到的转速,公式如下:
其中 为变速器在该挡位的机械效率
为变速器在该挡位的机械效率
然后根据该挡位的效率,计算输出的转矩,在驱动工况下,输出的转矩计算公式为:
在制动工况下,输出的转矩公式为:
其中 为变速器在该挡位的机械效率,
为变速器在该挡位的机械效率, 为变速器的转动惯量。
为变速器的转动惯量。
——发动机与电机模型
发动机总成模块包括离合器模块、附件模块和发动机模块。其中离合器模块传递扭矩的特性与动力总成控制逻辑的设定有关;附件模块取决于附件功率损耗的形式,一种是恒定功率的附件功率损耗,这种情况通常发生在车载电子设备消耗发动机功率的情形,如空调压缩机,另一种是功率损耗随发动机转速上升而上升的情形;发动机模块指的是通常意义下的发动机系统。
发动机无疑是个复杂的系统,建立完整体现发动机原理的数学模型是非常困难的。对于整车能耗和排放而言,发动机主要性能体现在其稳态MAP图中,因此发动机模块采用稳态MAP图为核心,反映其稳态特性,并加入一定的动态延迟环节,反映发动机的动态响应特性。
仿真模型中,发动机模块接收来自上一级模块输出端提出的转矩和转速请求,并在其扭矩输出特性图中插值寻找满足这一动态需求的工作点,通过插值计算此时的发动机油耗和排放。模块框图如图12所示。
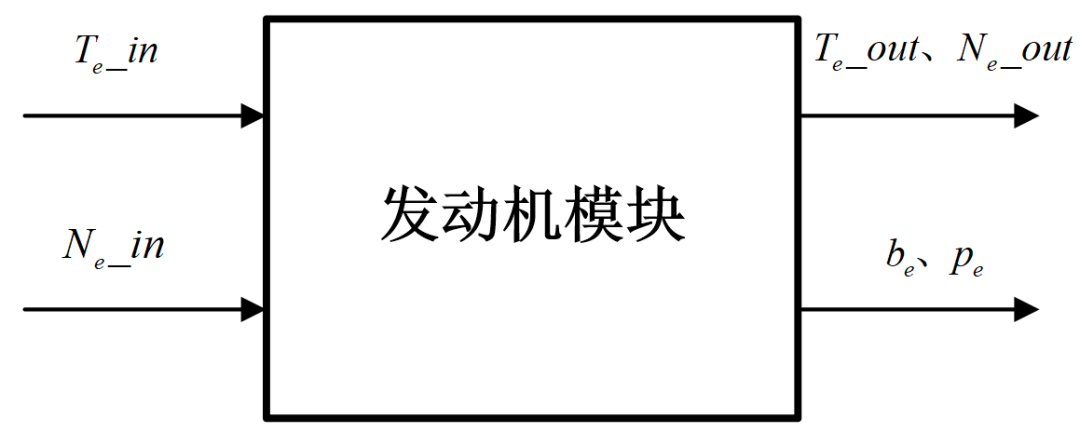
图12发动机总成模块框图
其中, 分别代表发动机的燃油消耗率和排放。另一方面,发动机模块中还需要建立相应的热模型,来评估工作过程中发动机的温度变化。 电机是一种双向能量转换装置,它能工作为电动机模式将电能转换为机械能,也能工作为发电机模式将机械能转换为电能,从而为电池充电。电机模块的功能为接受上一级模块传递的转速和转矩请求,并在其扭矩输出特性图中插值寻找满足这一动态需求的工作点,并根据效率计算电机的消耗的功率或者产生的功率。若是在电动机模式下,则
分别代表发动机的燃油消耗率和排放。另一方面,发动机模块中还需要建立相应的热模型,来评估工作过程中发动机的温度变化。 电机是一种双向能量转换装置,它能工作为电动机模式将电能转换为机械能,也能工作为发电机模式将机械能转换为电能,从而为电池充电。电机模块的功能为接受上一级模块传递的转速和转矩请求,并在其扭矩输出特性图中插值寻找满足这一动态需求的工作点,并根据效率计算电机的消耗的功率或者产生的功率。若是在电动机模式下,则
若是在发电机模式下,则

电机的模块框图如图13所示。
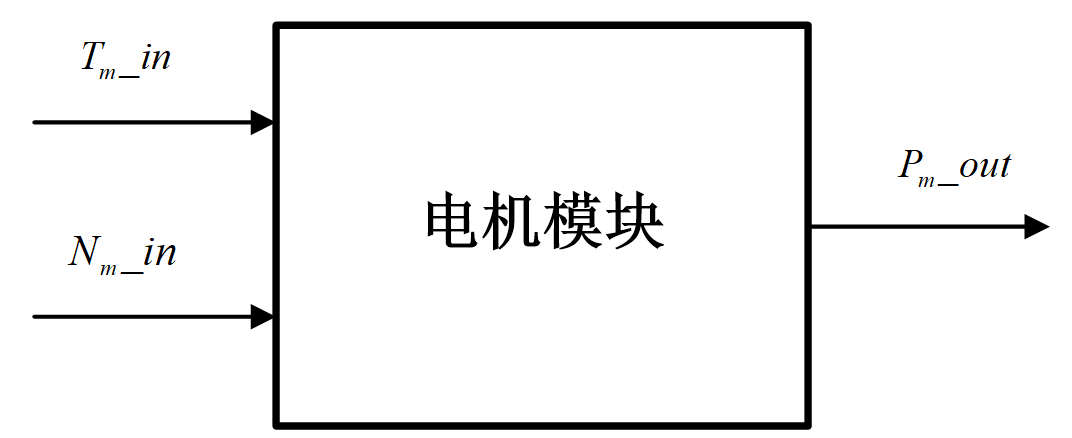
图13电机模块框图
与发动机建模类似,电机模块同样基于电机特性图。电机模块中同样需要建立相应的热模型,来评估工作过程中电机的温度变化。
——电池模型
电池是混合动力系统中的电能存储装置。电池模块在仿真模型中接受由电机模块传输过来的功率请求,然后返回一个电池组可以提供的实际功率值,并计算电池充放电过程中的内阻和库仑效率导致的功率损失、电池电压、电流和荷电状态SOC。电池模块框图如图14所示。
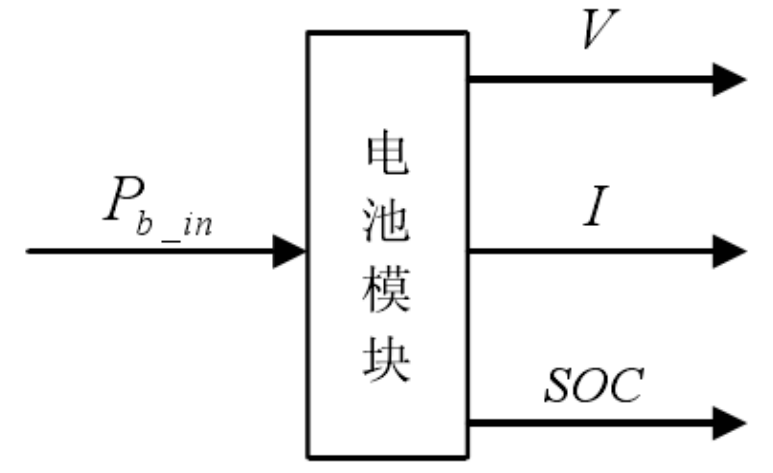
图14电池池模块框图 电池中存在复杂的热力电化学反应过程,因此建立精确地模型非常复杂,在此以最常用的内阻模型进行仿真。如图15所示:
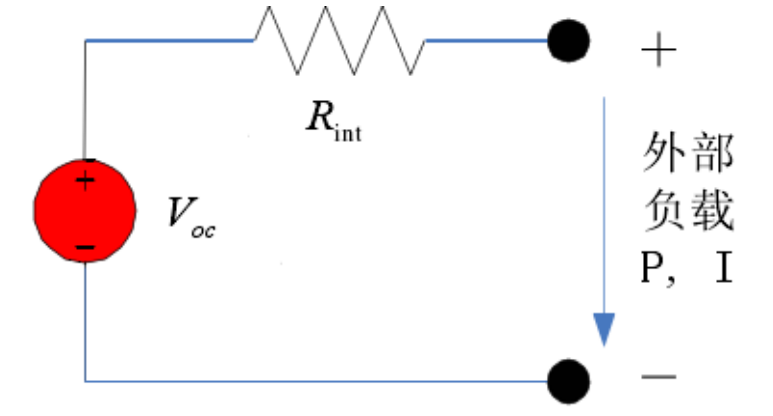
图15电池内阻模型图
蓄电池内阻模型的等效电路,由一个开路电压和一个内阻串连而成。开路电压和内阻均为SOC、温度和充放电电流的函数。因此模型需要电池的开路电压和内阻变化的相关特性曲线进行插值计算。
根据功率请求即外部负载功率,可以采用以下公式计算电流值:

根据电流值能够计算电池的SOC,公式如下:
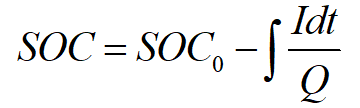
其中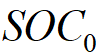 为初始SOC,Q为额定电量。
为初始SOC,Q为额定电量。
电池模块中,由于开路电压和电池充放电电阻和电池的温度密切相关,因而相较于发动机、电机而言,电池的热模型尤为重要。
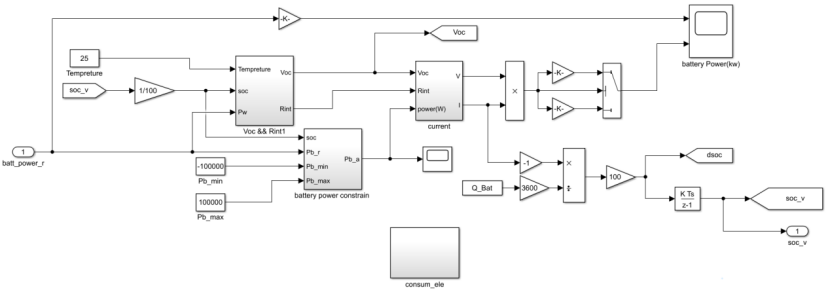
图16电池仿真模型
// 传感器仿真 //
传感器仿真即在虚拟环境中对自动驾驶车辆的传感系统进行重建,主要对象有摄像头、Radar、LiDAR、GPS、IMU、超声雷达等。本平台借助建立的理想传感器及误差模型模拟传感器在实际运行时的不确定状态,使接收到的传感器数据更接近真实状态。
本文应用CAN通信功能模块其目的主要是为了接收摄像头的检测数据以及车辆动力系统信息,然后利用所采集到信息,完成智能车在结构化道路上进行智能驾驶和动力系统控制算法的设计,并求解车辆行驶过程中所需的方向盘转角、发动机扭矩、电机扭矩、变速箱档位等控制指令,最后利用已开发CAN通信的发送功能,再回传给驾驶模拟器来实现车辆的自主行驶控制,其传感器在环测试子平台如图17所示。
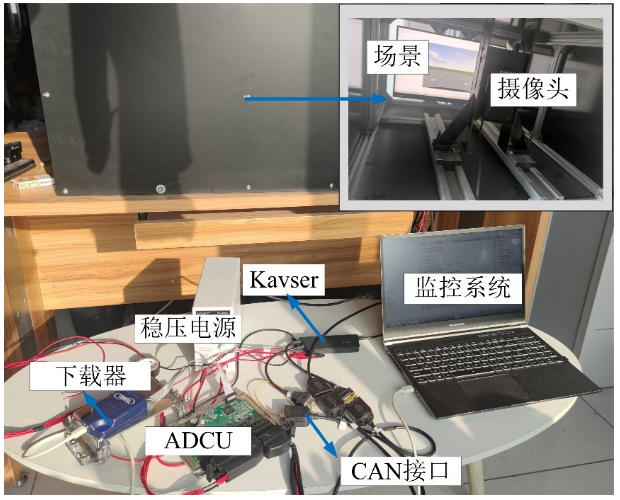
图17 传感器与控制器在环测试平台
// 红绿灯仿真 //
基于车联网环境的智能红绿灯控制实现车辆即时获取红绿灯状态信息,并设计十字路口红绿灯场景下车辆的行为决策和速度规划控制算法,保证车辆通过十字路口时的安全性与通行效率。所搭建的仿真场景与红绿灯硬件在环测试示意图如下图所示。
图18智能网联红绿灯仿真场景
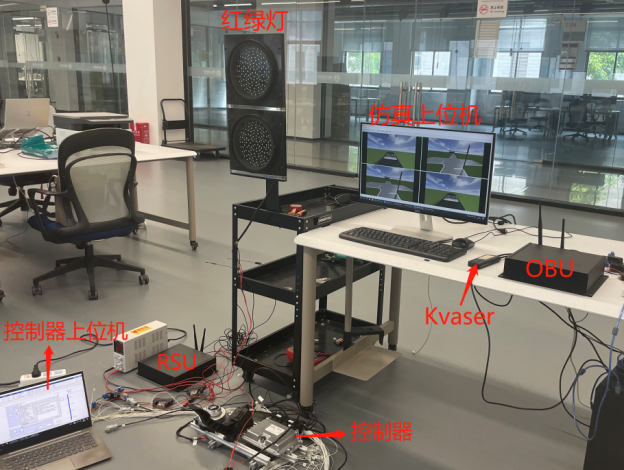
图19红绿灯硬件在环仿真测试
红绿灯在环功能测试结果如下所示,子平台详细介绍可参阅公众号文章(智能红绿灯搭建和网联环境下的交叉路口车辆速度规划)。
(1)红灯停车,绿灯行车(真实场景中的红绿灯与仿真场景中的红绿灯同步切换)
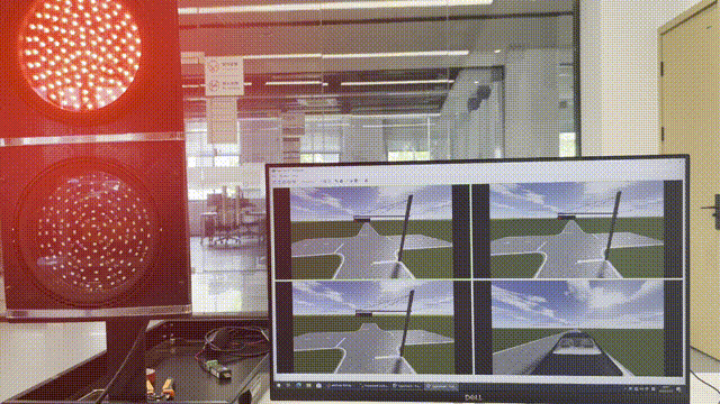
图20 红灯停车,绿灯行车
(2)长时绿灯加速通过(真实场景中的红绿灯与仿真场景中的红绿灯同步切换),可观察车辆即将通过路口并加速时的俯仰运动。
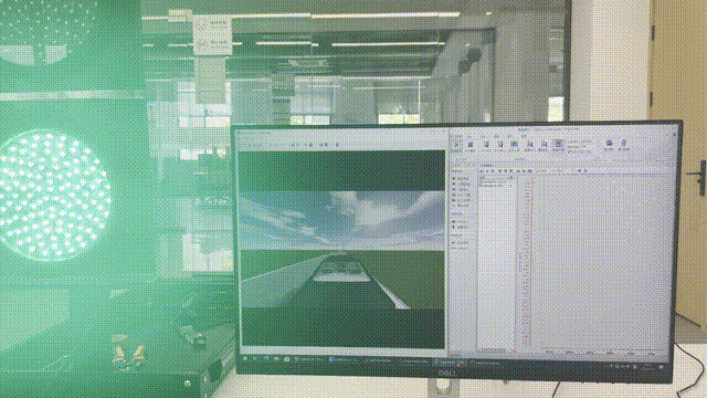
图21 长时绿灯加速通过
(3)短时绿灯提前刹车(真实场景中的红绿灯与仿真场景中的红绿灯同步切换)
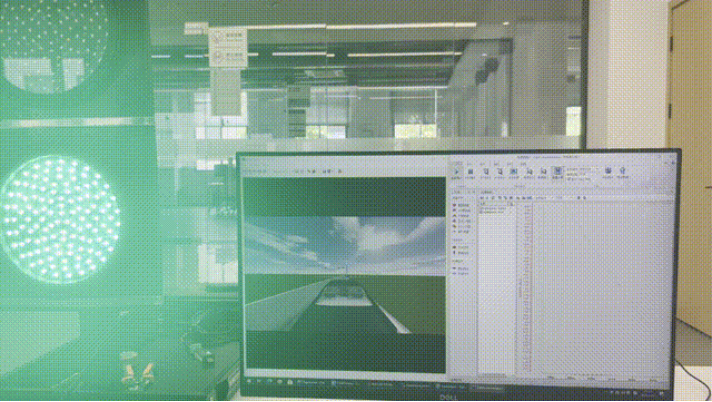
图22 短时绿灯提前刹车
// 环境仿真通信接口 //
平台内部各模块间的通信主要以CAN通信为主,驾驶模拟器上的各类硬件开关或按钮通过控制器采集信号后与平台通信。GUI实时监控界面通信和实车数据远程传输通过虚拟CAN模块/真实CAN通信工具(OBU、Kvaser等)实现,驾驶模拟器数据输入和算法输入/输出通过控制器或CAN数据解析模块实现。此外,在平台运行过程中,Simulink数据处理模块将会在多个数据传输节点进行实时监控并对异常数据进行处理,提高算法稳定性及有效性。
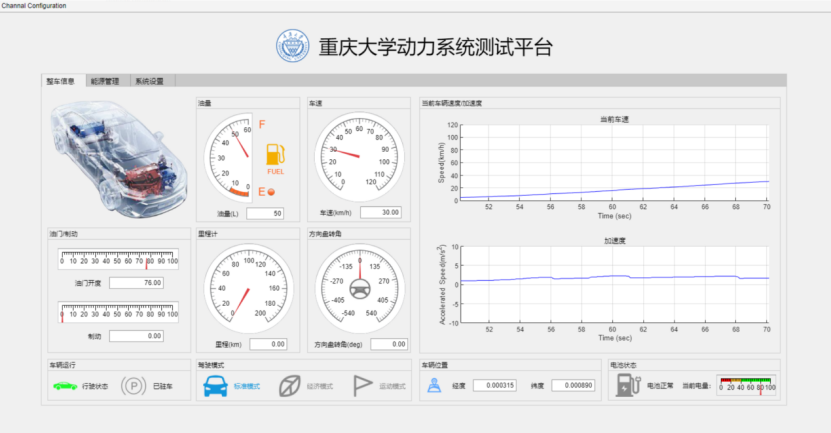
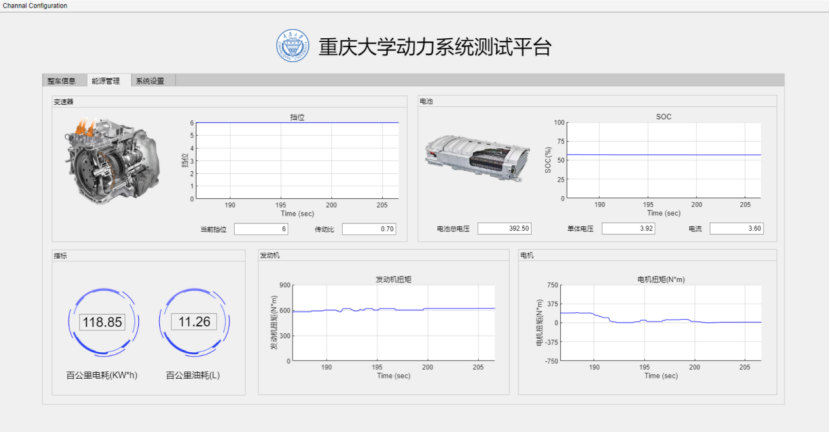
图23 上位机监测界面
仿真测试过程视频如下:
// 控制器快速开发验证 //
控制算法嵌入模块集成于Simulink内部并预留了车辆模型不同系统全部接口,开发者将相关算法与对应接口进行连接即可实现自动驾驶的多项功能,例如:动力模型构型优化及内部能量流展示分析与优化,电池状态SOX联合估计,电机、电池及空调多源协同热管理控制,驾驶场景分析与交通流预测和车速规划与能量管理协同优化等。此外,平台内部已嵌入多种基础算法,可保证开发者单独测试某项自动驾驶功能的需求,也可以利用快速原型实现控制器在环测试。
——动力系统智能控制
该测试平台是针对某插电式混合动力汽车搭建的,动力系统是发动机-电机混联驱动构型,插电式混合动力整车控制器具有以下功能:
(1)具有整车转矩管理、变速箱协调管理、发动机协调管理、电机电池协调管理、充电管理、故障诊断等功能;
(2)能够对上/下电时的高/低压控制逻辑进行管理,能够根据驾驶员输入对需求转矩做出准确判断,能够对车辆当前工况进行判断,能够实现扭矩请求和扭矩限制功能;
(3)可以实现再生制动功能,并且协调制动能量回收过程电机制动与ABS系统,保证制动安全;
(4)同时整车控制可以控制附件,如电动助力转向、空调、打气泵等;
(5)故障诊断功能,能够识别零部件及系统功能故障,并采取相应的应对策略,提供系统故障保护下的跛行功能;
具体的插电式混合动力汽车整车控制器功能示意图如图24所示,所搭建的动力系统智能控制策略如图25所示。
图24整车控制器功能示意图
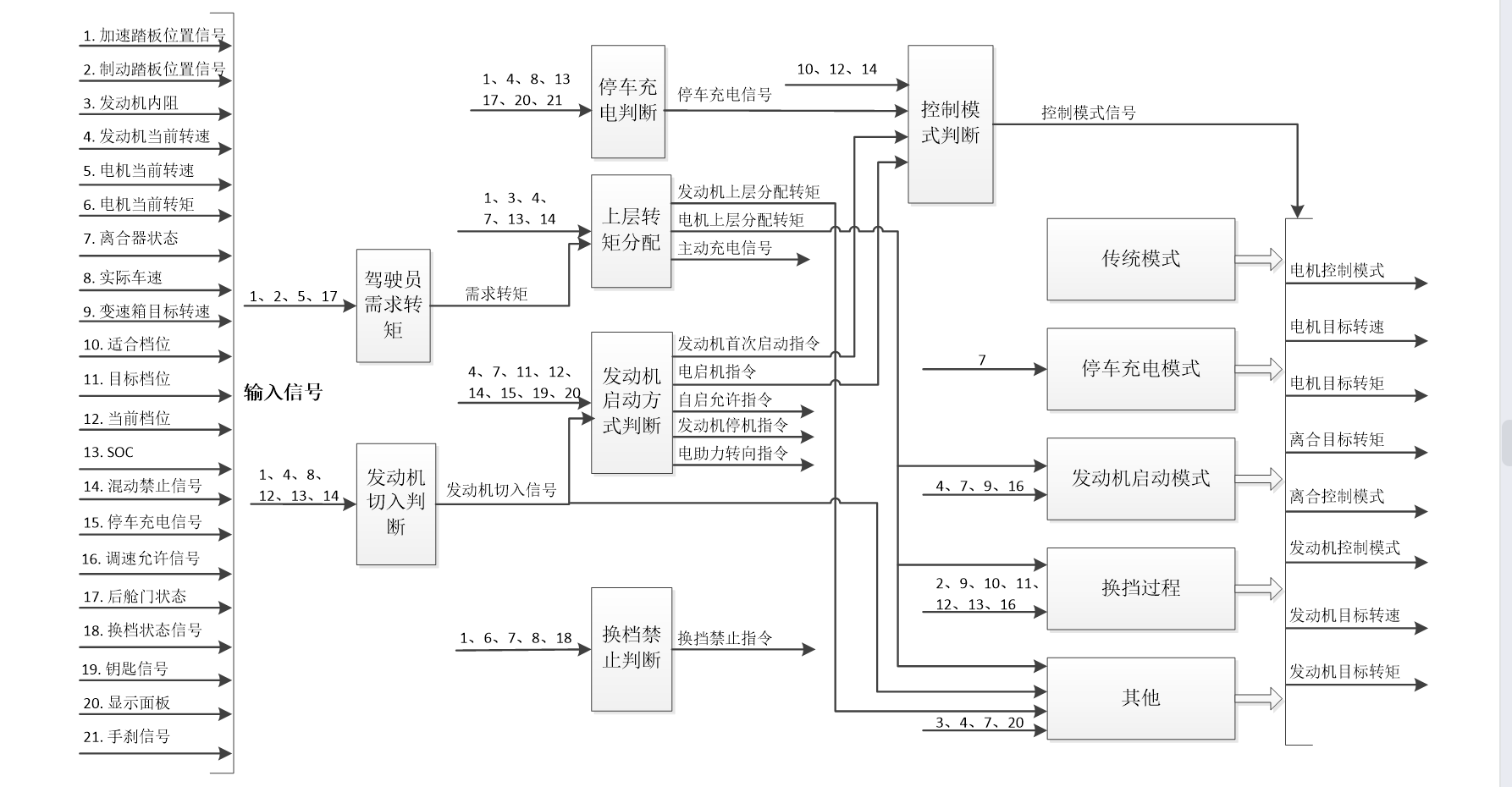
图25动力系统智能控制策略示意图
插电式混合动力汽车有发动机和电机两个动力源,在实际运行过程中,燃油和电池组成的多能源系统需要整车控制器进行协调管理,在驱动过程中,在低速低扭矩请求下整车控制器控制电机输出驱动扭矩,速度高于一定门限后整车控制器控制发动机输出驱动扭矩,在发动机驱动过程中整车控制器会根据发动机工作点控制电机进行协调,进而进入混合驱动模式或者进行发动机主动充电模式。同样在制动过程中,当驾驶员踩下制动踏板,整车控制器会根据驾驶员减速意图计算需求的制动扭矩,并控制电机系统和气压制动系统进行协调控制,实现制动安全的同时保证制动能量回收最大化。整个控制逻辑实现了多能源系统的优化控制。
能量管理策略为整车控制器控制策略核心功能,控制器通过驾驶员驾驶意图判别结合典型城市交通工况流量统计信息,得到对应的控制策略,针对不同的工况路况以及驾驶员油门踏板制动踏板的变化采用相对最优的控制策略,以获得更高的燃油经济性。具体示意图如图26所示。
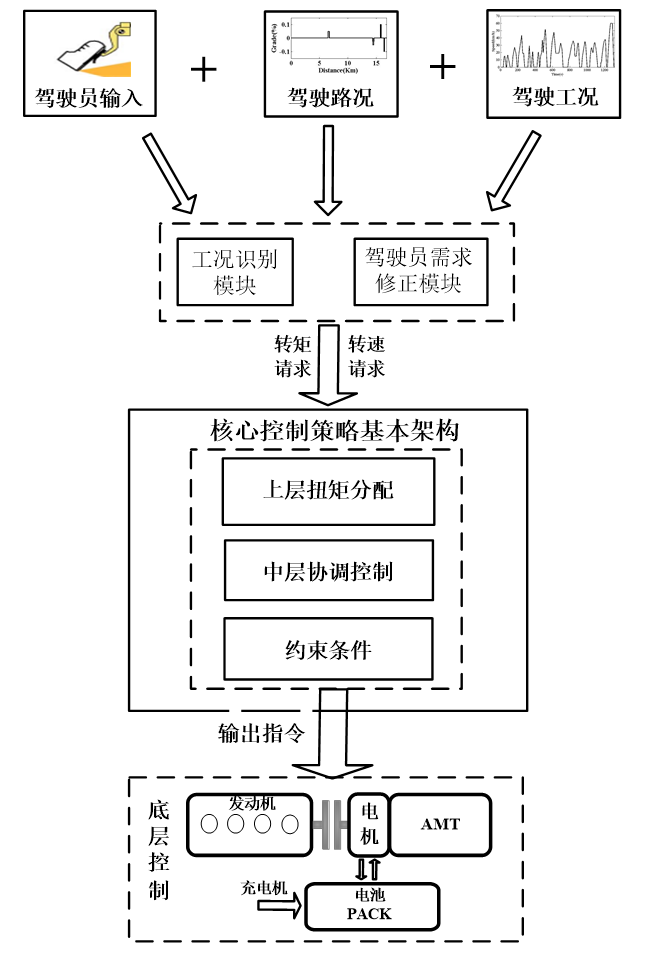
图26 核心控制策略构架示意图
——基于道路信息的瞬时能量优化控制
针对混合动力汽车能量分配策略效率低、适应性差、无实时调节性等缺点,设计了基于国内典型城市道路信息的能量优化控制方法及控制器实现,对国内典型城市典型交通信息流量进行统计记录,形成拥有一定统计规律的与时间、线路地点有关的交通流量信息,配合GPS卫星导航系统,开发出具有实时调节性的优化能量分配算法,在经常拥堵的时刻或地段适时调整电动机驱动车辆策略,而路况较为畅通的时刻或地段采用发动机驱动车辆策略。所开发控制算法具有自学习功能,随着控制策略的循环往复运行,能够在线调节分配系数,实现纯电动、发动机驱动和混合驱动三种模式的动态切换、变速器换挡点的动态调节以及制动能量回收幅度的动态调节。综合油耗、电耗、充电时间间隔、电池成本等多个性能指标和约束条件,以达到更高的整车燃油经济性,进一步提升动力系统的节油率。所开发算法内容结构如图27所示。
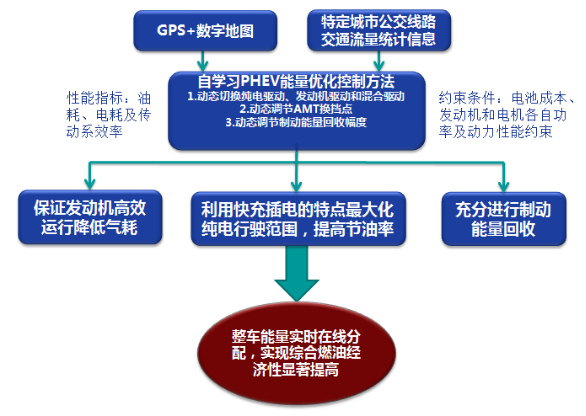
图27 基于自学习的PHEV能量优化控制方法结构图
—— 制动能量回馈控制
传统汽车在制动过程中,其动能除克服风阻和滚阻外,绝大部分能量则通过制动器摩擦生热而消耗掉。回馈制动技术(又称制动能量回收技术)是指汽车减速或制动时将其中一部分机械能转化为其他形式的能量,并加以再利用的技术。由于回馈制动能将行驶车辆的一部分动能回收起来并加以再利用,因此,研究回馈制动技术对于提高新能源汽车的燃油经济性、缓解能源危机、改善环境压力具有及其重要的战略意义。在制动能量回馈控制中,整车控制器根据加速踏板和制动踏板的开度以及动力电池的SOC值来判断车辆此时能否进行制动能量回馈,并向电机控制器发出制动指令,回收能部分能量。制动能量回收目前是提高整车节油率的重要方式之一,怎样利用机电耦合系统的特性最大限度回馈制动能量仍是目前需要解决的技术难题。同时,在回馈制动过程中遇到车轮抱死的情况,整车控制器怎样与底层ABS系统进行协调控制,依然是该领域亟待解决的难题。因此,本测试平台也对制动系统进行建模仿真。
为了保证整车的制动安全性,回馈制动系统常配合ABS系统协调工作。对于插电式混合动力商用车,回馈制动系统需要和气压ABS制动系统相互协调,才可以既保证制动安全性以及良好的能量回馈效率。其制动能量回馈系统结构如图28所示。
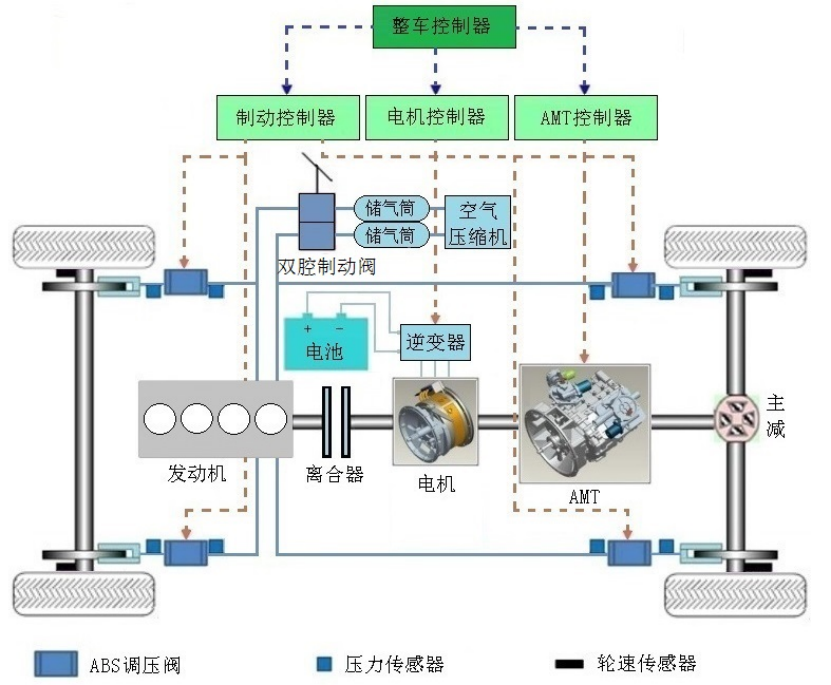
图28 制动能量回馈系统结构框图
整个回馈制动系统如图28所示。其中,该制动踏板为行程踏板,它可以将制动踏板位置信号实时的传送给制动控制器,以便制动控制器根据制动踏板行程信号来协调机械制动和回馈制动。回馈制动控制阀选用现行气压ABS系统常用的ABS调压阀,该调压阀为成熟的ABS产品部件,具有动作迅速、可靠性高的优良特性。整个回馈制动控制框图如图29所示。
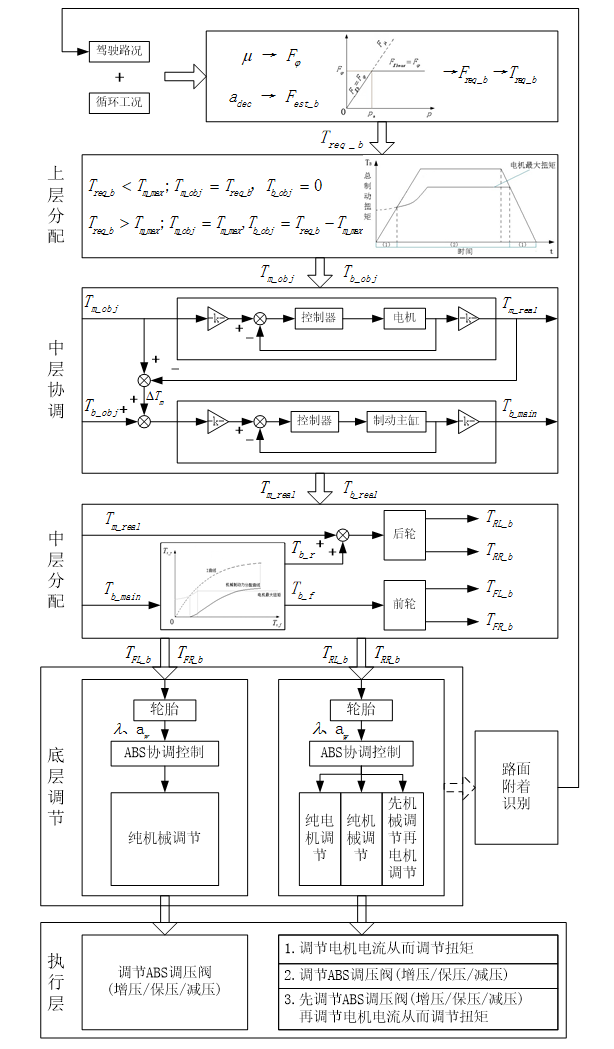
图29回馈制动控制框图
——整车控制策略
根据插电式混合动力整车控制器功能需求,所设计控制器软件模块示意图如图30所示。
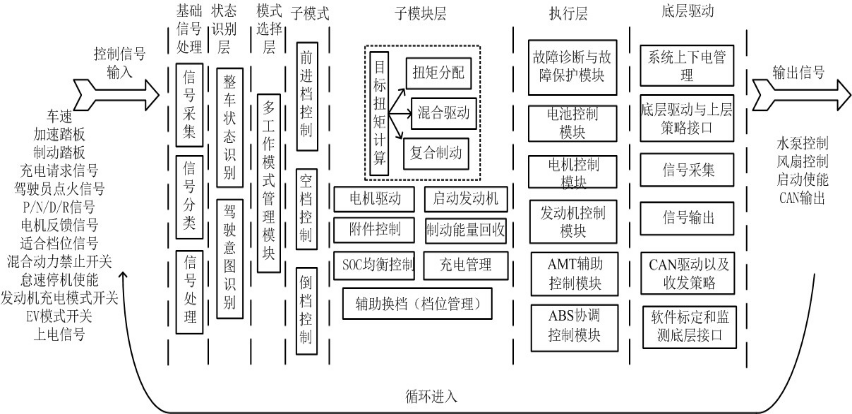
图30 整车控制器软件模块示意图
如图30所示,整车控制器输入信号包括驾驶员点火信号、车速信号、加速踏板和制动踏板信号、充电请求信号、停车/空挡/前进/倒挡信号、电机反馈信号、适合挡位信号、混合动力禁止开关信号、怠速停机使能信号、发动机充电模式开关信号、EV模式开关信号及上电信号等。输出信号主要包括水泵控制信号、风扇控制信号、启动使能信号及CAN输出信号。具体控制流程如下步骤:
1)控制器在基础信号处理层的信号采集模块、信号分类模块和信号处理模块里将输入信号进行采集、分类、处理;
2)在状态识别层进行整车状态识别和驾驶意图判断,判断此时车是在驱动、制动、滑行等状态,以及驾驶员需求加速减速等;
3)整车控制器在模式选择层选择整车运行模式,即纯电驱动、发动机驱动、混合驱动、发动机主动充电及制动能量回收。
4)结合当前车辆实际运行状态和驾驶员输入决定进入具体相应的上层功能模块,包括目标扭矩计算模块、电机驱动控制模块、启动发动机模块、附件控制模块、SOC均衡控制模块、充电管理模块及辅助换挡模块等;
5)经过上层各功能模块的运算处理,上层将对执行层进行调用同时根据实际工况进行协调控制,执行层包括发动机、电机、电池控制模块,辅助换挡调用模块,ABS协调控制模块及故障诊断与故障保护模块;
6)各模块程序的完成还需要对底层驱动集成,因此进入底层驱动层,包括系统上下电管理、底层驱动与上层策略接口、信号采集与信号输出、CAN驱动及收发策略、软件标定及底层接口检测。
具体的整车控制器控制器系统流程图如下图所示。
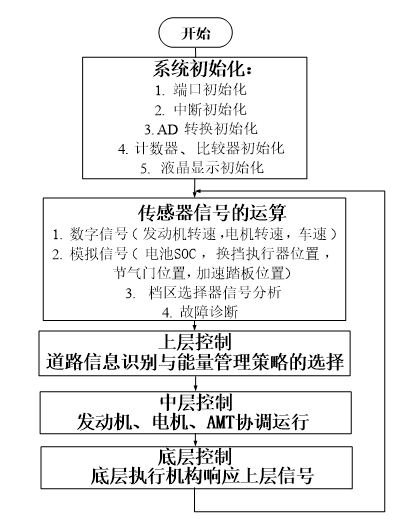
图31 整车控制器控制系统流程图
// 驾驶模拟器 //
驾驶模拟器支持人机共驾功能,可实现驾驶员在环测试、自动驾驶功能测试以及各类循环工况导入测试等。当采用给定的测试用例进行测试分析时,可利用PID构建驾驶员模型以跟踪指定的需求车速,如下图所示。为了适应不同场景需求,本实验平台搭载了经济模式、舒适模式、运动模式三种控制模式。正常行驶时,三种模式可以自由地进行切换,经济模式下,车辆油门的响应还会比较柔和,车辆行驶过程中会更加节能;舒适模式是为了获得更好的乘坐舒适性,此模式下车子的油门响应是最平衡的,操控感更简单舒适;运动模式下,油门与制动的灵敏度会更高,加速与制动响应更加快速,这个时候汽车的性能能够很好体现出来。三种模式下的驾驶员模型参数有所不同,可通过标定的方式实现。
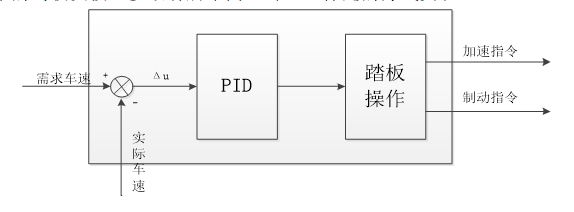
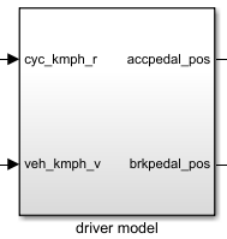
图32 驾驶员模型
驾驶员在车辆行驶过程中会根据车辆运行状态和周围环境以及自己的驾驶习惯对加速踏板、制动踏板等采取一定的动作,这就是驾驶意图。在“人—车—路”的闭环系统中,驾驶员可以看作一个自适应智能传感器,而驾驶员意图识别也就是将该传感器的信号加以处理得到对车辆控制有用的信息。在自动驾驶时可以采用上述驾驶员模型进行跟踪控制,当人工驾驶时,驾驶员行为对车辆燃油经济性和安全性影响很大,因此,控制策略中应该引入驾驶员驾驶意图识别,该模块可根据基本的逻辑判别得到基于典型城市工况的驾驶员意图,然后选择最合适的能量优化控制策略,以充分发掘上层控制策略对于节油率提升的潜力。
目前关于驾驶员意图识别进行的研究着重于对典型意图的分类,例如超车、冲坡、减速、停车等,分析每一种意图所相应的识别特征,根据采集到的数据分别进行模糊贴近度计算,再根据综合判断,识别出驾驶员的确切意图以及相应的档位操作原则。也有学者针对人的行为建立模型,提出了基于卡尔曼滤波的预测控制系统,将人看作拥有相当多的内部智力状态的马尔可夫器件,每一个状态都有其特定的控制行为和内部状态转换概率;将驾驶员的操作与典型动作相比较,可以确定驾驶员想要执行的动作。
针对行驶环境的识别,大多数控制策略建立了一种递阶的行驶环境识别体系,底层由路面附着识别,行驶区域识别,坡道、弯道识别3个平行的部分组成,进行实时识别;上层根据底层的识别结果,进行相应的推理和决策,确定与当前行驶环境相适应的驾驶策略。将车辆行驶环境分为城市道路、拥挤道路、上坡、下坡和快速路五类,提取各类行驶环境的特征,选用设定时间内的七个参数,制定模糊规则来判断车辆行驶环境,并设计自适应模糊判断模型。并通过解释结构模型,将驾驶员模型识别分为定量子模型和定性子模型两个部分,定性子模型包含天气情况、驾驶时间、经验判断(道路宽度、弯道大小、路面障碍等)等,通过模糊推理得到定性的结果,可以有效地避免弯道及坡道行驶时的误升档或频繁换档。
在驾驶员意图识别过程中,驾驶员意图难以用准确的数学模型来描述,属于经验型模型,模糊理论在经验型模型的处理上有较大的优势,是驾驶员意图识别选用的主要方法。
-
传感器
+关注
关注
2550文章
50926浏览量
752729 -
仿真
+关注
关注
50文章
4060浏览量
133498 -
动力系统
+关注
关注
1文章
292浏览量
20648
原文标题:智能混合动力系统仿真测试平台开发
文章出处:【微信号:新能源入门客,微信公众号:新能源入门客】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
混合动力车的快速控制原型、仿真及远程监控系统报告
汽车动力系统解决方案集锦
新能源汽车动力系统设计资料精华
汽车动力系统大盘点:助你设计绝佳方案
本田第四代混合动力系统技术的设计思想和工作原理是什么
丰田普锐斯混合动力系统原理
混合动力系统研发的技术问题罗列
混合动力系统相关知识汇总

ISG型客车混合动力系统的仿真

关于双电机混合动力系统的功能介绍和应用





 工商网监
工商网监
评论