 国产传感器罕见的时代机遇!120万亿机器人市场!哪些有望率先打破垄断?(全面分析)
国产传感器罕见的时代机遇!120万亿机器人市场!哪些有望率先打破垄断?(全面分析)
7月28日,据日本知名媒体日经中文网报道,中国机器人企业深圳普渡科技进军日本市场;据电子发烧友统计,2023年1月到7月份,智能机器人领域重大融资超45起,总金额超35亿元;据东方财富网数据显示,机器人指数今年以来弹性突出,上半年指数涨幅达到25%,多个机器人传感器概念企业涨幅明显。
从市场到资本,目前中国智能机器人产业已开始爆发,根据麦肯锡预测,长期来看,全球人形机器人市场空间可达120万亿级别,是一个崭新且空间庞大的蓝海市场。据艾瑞咨询预测,2021年到2025年国内智能机器人市场规模的年平均复合增长率将达到40%,2025年中国智能机器人市场规模接近千亿。
多家证券公司研报认为,传感器是机器人重要组成部分,价值量或仅次于关节模组。传感器市场高增长率表明机器人对于传感器有强烈需求。
此外,国产机器人企业更倾向于打造可控的全产业链,将对国产传感器、减速器等上下游有旺盛的需求,这是国产高端传感器的时代机遇。
分析称,我国传感器领域中,规模效应更强的领域,或率先实现国产替代。中国消费类电子的传感器,由于市场的拉动,近十年已经有了很大的进步。在工业领域,部分低端领域已有成功案例,但高端产品目前卡脖子情况仍较为严重,国产替代之路任重道远。未来人形机器人如果能够达到消费品级别的体量,可能推动细分板块的国产替代加速。
在人形机器人的快速发展中,或将会带动新型柔性传感器加速落地。详细分析见下文。
把握时代机遇!布局人形机器人相关传感器领域,有望扩大高端传感器国产率
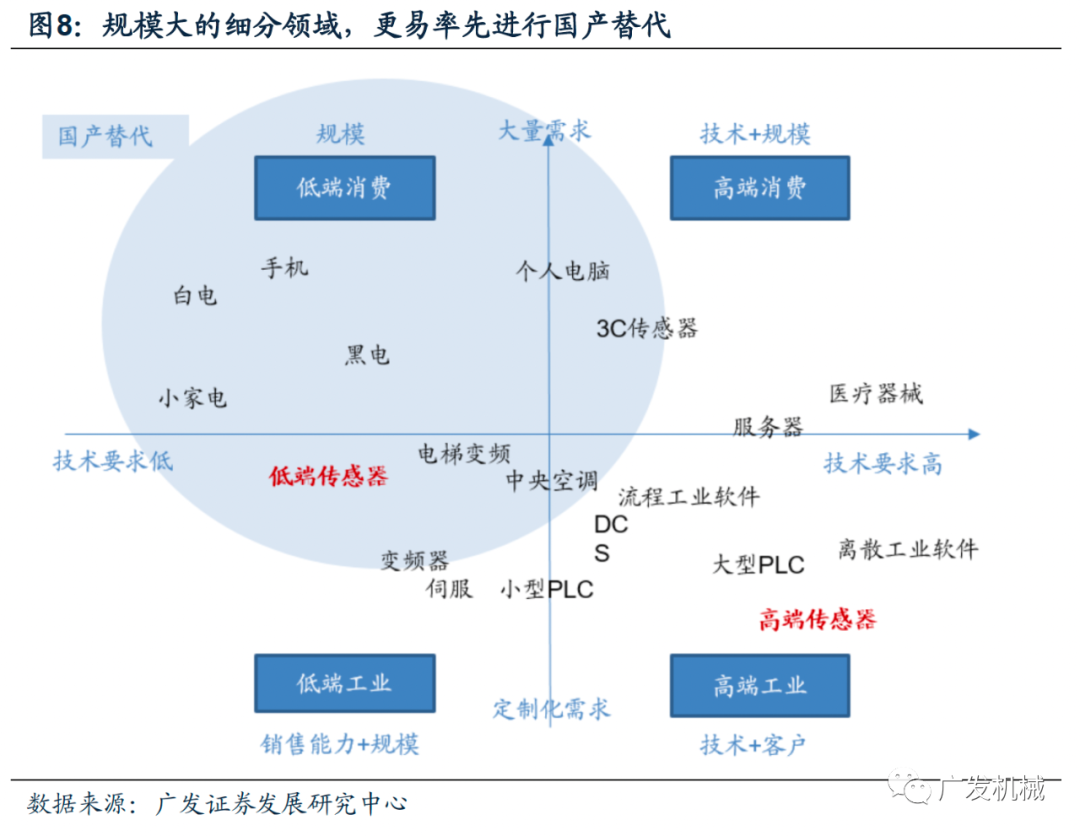
传感器下游应用领域广泛,产业链条较长、产品种类众多,各类产品国产替代进程各不相同。规模效应更强的领域,更容易率先进行国产替代。
人形机器人,传感器的新机会。人形机器人需要用到多种传感器,包括力矩传感器,拉压力传感器、编码器、温度传感器、六力传感器和惯导传感器等。其中,惯导传感器(IMU)是实现人形机器人姿态控制的核心,六力传感器是力控、摆动稳定控制的核心,可精准测量随机变化的力。随着人形机器人产业的扩张,有望带动传感器行业进一步扩容。
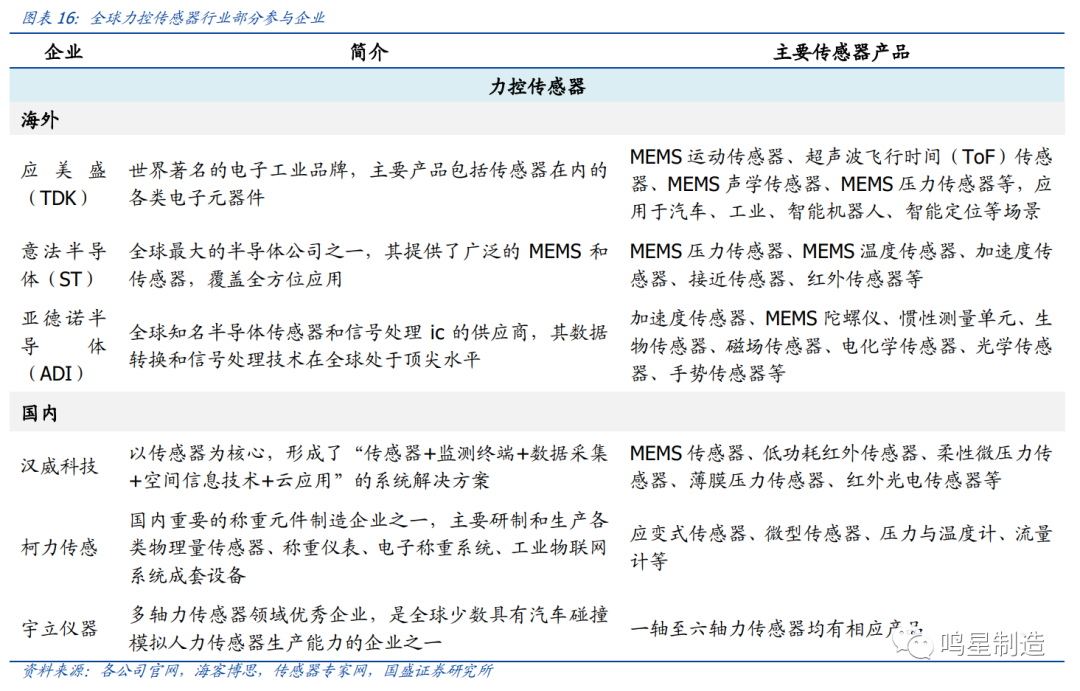
全球传感器市场规模超万亿,我国高端传感器仍处于起步阶段。传感器行业龙头以海外公司为主,如安森美、基恩士、应美盛等,这类公司在其细分传感器赛道收入规模高、市占率高。我国企业普遍规模较小,成长空间大。
应美盛:时代机遇助力高速扩张。应美盛是MEMS惯导传感器的行业龙头。应美盛在2011年至2016年间经历了高速扩张阶段,营业收入CAGR高达33.69%。应美盛成功的主要原因在于把握住了2007以来手机行业爆发性增长的动向,果断切割了2010年之前主要的为任天堂等游戏机厂商提供惯导传感器的业务转而为主要手机厂商苹果和三星等提供手机用MEMS惯导传感器,充分享受了时代红利。
国内企业积极布局高技术传感器领域,顺应行业浪潮打破海外龙头垄断。我国传感器相关企业与海外龙头相比普遍规模偏小,但仍然涌现出来一批如芯动联科、汉威科技等掌握了核心技术的传感器企业。同时这些企业积极布局人形机器人相关传感器领域,把握时代机遇,有望顺应时代潮流进一步扩大高端传感器国产化率。
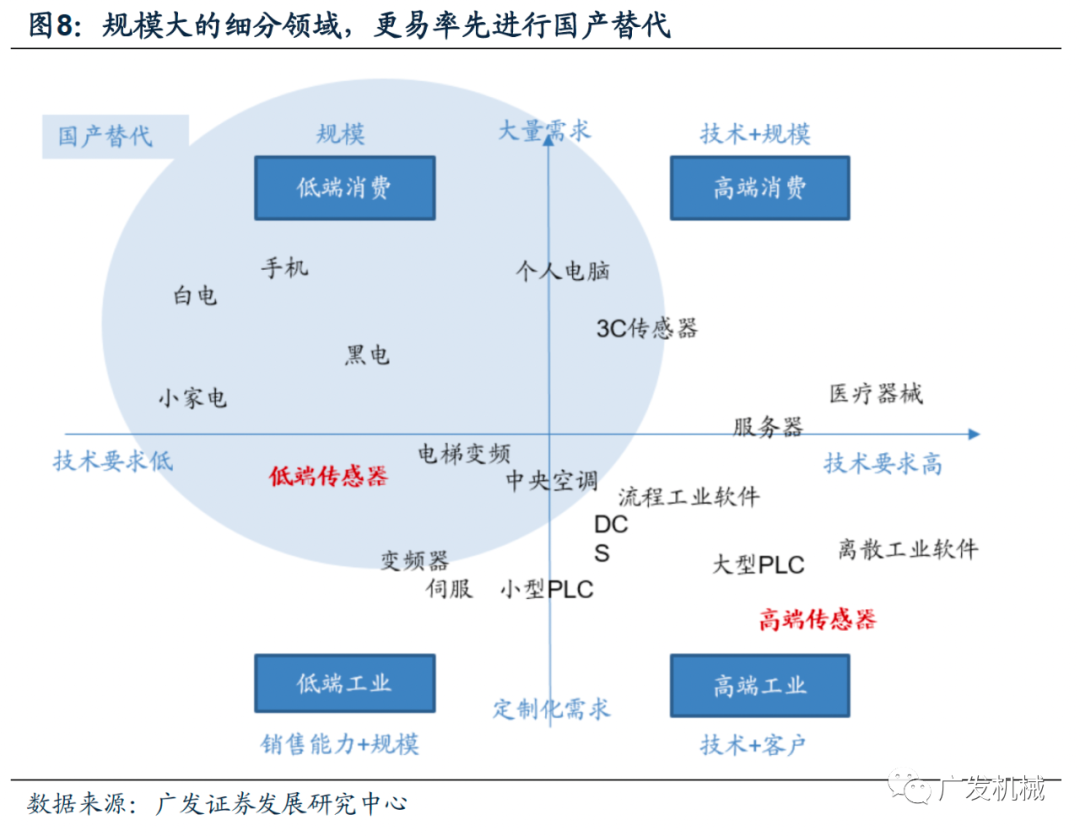
▲来源:广发证券
视觉与力控传感器:机器人感知应用需求最多
传感器是机器人重要组成部分,价值量或仅次于关节模组。根据YOLE数据,2015-2021年无人机及机器人传感器市场从3.51亿美元增长至7.09亿美元,复合增长率高达12.4%,其中光学传感器占比达74%。
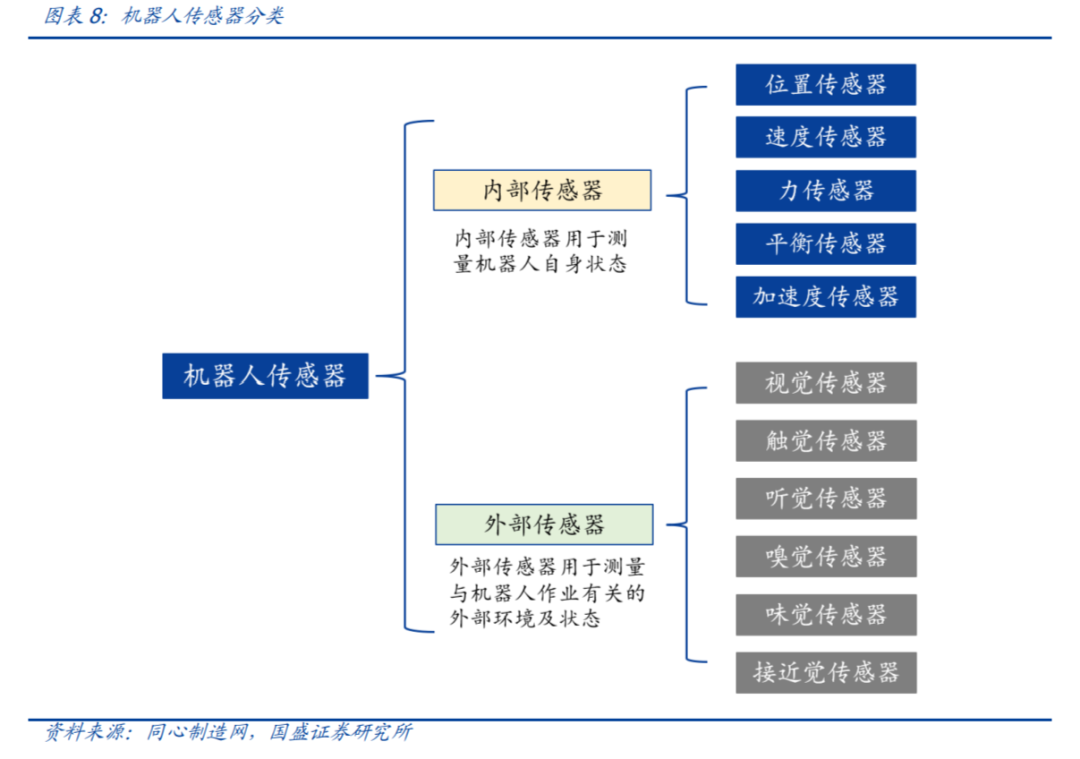
传感器市场高增长率表明机器人对于传感器有强烈需求。机器人传感器可以分为内部传感器和外部传感器,其中内部传感器主要用于测量机器人自身状态,以实现独立行走、动态平衡、一般肢体动作等;外部传感器模仿人类感官,包括视觉、触觉、听觉、嗅觉、味觉、接近觉等传感器。
通常来说,关节模组是人形机器人价值量占比最高的环节,占比一般在40%以上,我们通过梳理人形机器人传感器的可能应用位置与数量,推测人形机器人传感器价值量占比或仅次于关节模组。
视觉:机器人视觉的要点在于移动场景、精细描绘和高集成度。机器人自主导航与汽车自动驾驶技术系出同源,其中机器人视觉受限于内部空间,需具有更高集成度。机器人自主导航与汽车自动驾驶共同的三大关键技术为环境感知、规划决策与执行控制,自动驾驶和机器人主要通过传感器来获取周围环境信息。
常用的视觉和环境感知传感器为摄像头、雷达(毫米波、激光、超声波等)、红外传感器、GPS、IMU等。

摄像头:机器人的眼睛,包括普通单目摄像头与深度摄像头。
1)普通单目摄像头:通过图像匹配进行目标识别,再通过目标在图像中的大小去估算目标距离,缺陷在于对距离的识别依赖于图像识别的准确度;
2)单目结构光深度摄像头:由一个RGB摄像头、结构光投射器(红外)和结构光深度感应器(CMOS)组成,通过投影一个预先设计好的图案作为参考图像(编码光源),将结构光投射至物体表面,再通过深度感应器接收该物体表面反射的结构光图案,由于接收图案会因物体的立体形状而发生变形,因此可以通过该图案在摄像机上的位置和形变程度来计算物体表面的空间信息;
3)双目深度摄像头:双目摄像头的原理与人眼相似,通过对图像视差进行计算,直接对前方景物进行距离测量;
4)ToF深度摄像头:即飞行时间摄像头,由光源、光学部件、传感器、控制电路以及处理电路等几部单元组成,通过给目标连续发送光脉冲,利用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物体的距离。

激光雷达:激光器发射出脉冲激光打到物体引起散射,一部分光波会反射到激光雷达的接收器上,根据激光测距原理可计算出距离信息。脉冲激光不断地扫描目标物,就可以得到目标物上全部目标点的数据,用此数据进行成像处理后,即可得到精确的目标物体图像。激光雷达分为单线和多线,常见的多线激光雷达有4线,8线,16线,32线和64线。其缺陷在于激光雷达易受大气条件及工作环境烟尘等影响,难以实现全天候工作,且成本高昂。
毫米波雷达:毫米波是指波长在 1-10mm 之间的电磁波,换算成频率后,毫米波的频率位于30-300GHz 之间。与红外、激光等光学导引头相比,毫米波导引头穿透雾、烟、灰尘的能力强,传输距离远,具有全天候全天时的特点。同时,毫米波雷达性能稳定,不受目标物体形状、颜色等干扰。其主要缺陷在于成本较高,价格仅次于激光雷达。
超声波雷达:超声波雷达是利用传感器内的超声波发生器产生 40KHz的超声波,再由接收探头接收经障碍物反射回来的超声波,根据超声波反射接收的时间差计算与障碍物之间的距离。超声波雷达成本较低,探测距离近,精度高,且不受光线条件的影响,因此常用于泊车系统中。其缺陷在于检测角度较小,一辆车可能需要在不同角度安装多个超声波雷达。
红外传感器:红外传感器的测距基本原理为发光管发出红外光,光敏接收管接收前方物体反射光,据此判断前方是否有障碍物。根据发射光的强弱可以判断物体的距离,它的原理是接收管接收的光强随反射物体的距离而变化,距离近则反射光强,距离远则反射光弱。
马斯克在股东日表示,特斯拉已经打通了FSD和机器人的底层模块,实现了一定程度的算法复用。FSD算法利用传感器数据进行环境感知,这些传感器也可以帮助机器人感知周围环境,识别物体、人和障碍物等。
力控:多维力矩/力传感是目前最优解,电子皮肤或为触觉终极方案。目前机器人力控方案大致有3类,分别为电流环力控、多维力矩/力传感器力控、被动力控(弹性体),其中多维力矩/力传感器力控是当前力控的最佳方案,其硬件包括关节部位的单轴力矩传感器和机器人执行器末端的6轴力传感器。关于多维力传感器及柔性传感器厂商介绍,可参看《16家国产触觉传感器公司盘点(全网最全)》
同时,机器人若要模拟人体的触觉,以及实现人体皮肤对温度、湿度等外界物理量的感知,则电子皮肤可能是最佳路径之一。电子皮肤需要集成各类传感器和集成电路,并使用柔性的材料制作,壁垒较高,目前尚未在机器人领域大量应用。但从泛用性与仿生性角度,我们认为电子皮肤或是机器人触觉的终极方案。
1)电流环力控:通过电机的电流闭环做力闭环反馈控制,适用于直驱电机或者带小减速比的应用场景。其优点在于成本低,不需要增长额外的传感设备,而缺点在于精度较低,响应较慢,适用场景有限。
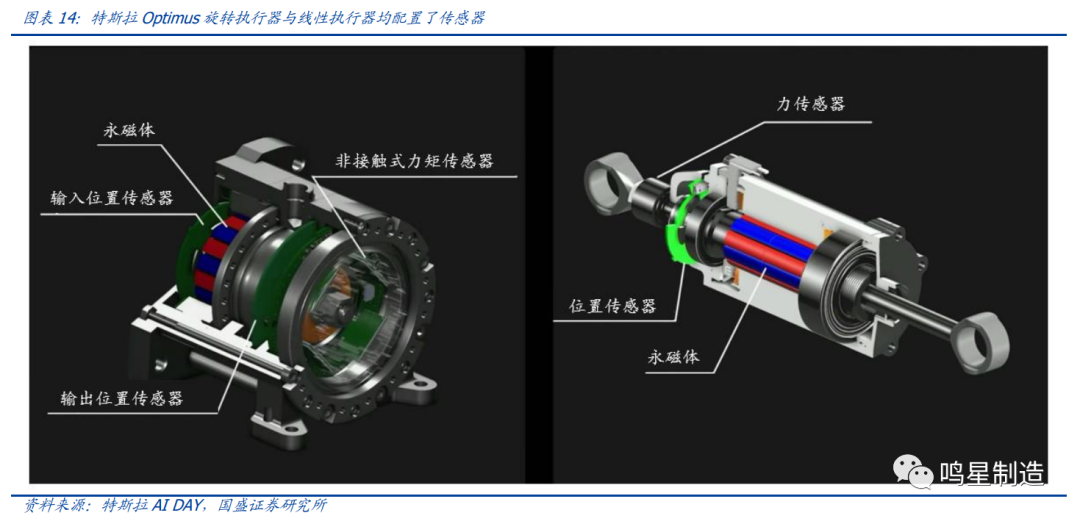
2)力矩/力传感器力控:机器人中的力传感器主要有关节部位的单轴力矩传感器和机器人执行器末端的6轴力传感器,测量机器人内部受力情况,以及末端执行器与外界环境交互的受力情况。这类力控方法是性能最佳,但成本最高的方案,典型应用案例为KUKA LBR iiwa机械手。特斯拉Optimus在旋转关节执行器处配置了力矩传感器,其在股东日上展示了机械手控制力道不打碎鸡蛋的视频,显示出优秀的电机转矩控制能力。
3)被动力控(弹性体):在末端执行器上添加弹性体,通过弹性体形变测量力矩,或用于向终端施加恒定力。该方案常用于低成本、高集成度的场景。
电子皮肤:最具潜力的触觉传感器,有望成为机器人触觉终极方案。机器人若要模拟人体的触觉,以及实现人体皮肤对温度、湿度等外界物理量的感知,则电子皮肤可能是最佳路径之一。想要复刻天然皮肤的功能,电子皮肤需要集成各类传感器和集成电路,并使用柔性的材料制作,壁垒极高。
在实现上述工艺的同时,电子皮肤与机器人本体的包裹结合、信号传输等方面均是难点,因此,电子皮肤目前尚未在机器人领域大量使用。但从泛用性与仿生性角度,我们认为电子皮肤或是机器人触觉的终极方案。
力控传感器领域,国内尚未出现绝对龙头,未来机器人有望带来大量需求,推动国内企业快速发展。在力控传感器领域,国内企业与海外龙头差距较大,海外相关企业多为电子元器件综合供应商,而国内企业尚未出现类似于视觉领域的绝对龙头。我们认为,机器人有望带来大量力控传感器需求,国内相关企业有望持续受益。
惯导传感器:人形机器人的姿态控制核心
惯导传感器(IMU)是人形机器人姿态控制的核心。惯导传感器是测量物体三轴姿态 角(或角速率)及加速度的装置,可测量来自三个方向的线性加速度和旋转角速率, 通过解算可获得载体的姿态、速度和位移等信息。
在体育运动中,惯性传感器由用 于测量力和加速度的加速度计,用于指示旋转的陀螺仪和用于测量人体姿势的磁力 计组成,这些传感器跨三个轴收集数据并捕获运动员的细微动作。
IMU传感器通常较 为小型、轻便且具有长时间的电池待机时间。并且可以进行编程和设计,以解决使 用过程中的实际问题,从而对动作进行精细分析。同时,来自IMU的数据是连续、实时的。
在人形机器人中,惯导传感器有望成为其姿态控制的核心。惯导传感器是现代导航系统的关键组成部分之一。惯性传感器按照精度通常分为分 为消费级、工业级、战术级、导航级和战略级这五种。其中,消费级惯导传感器通常 应用在智能手机和汽车辅助驾驶,人形机器人和自动驾驶所使用的的惯导传感器通 常为战术级。
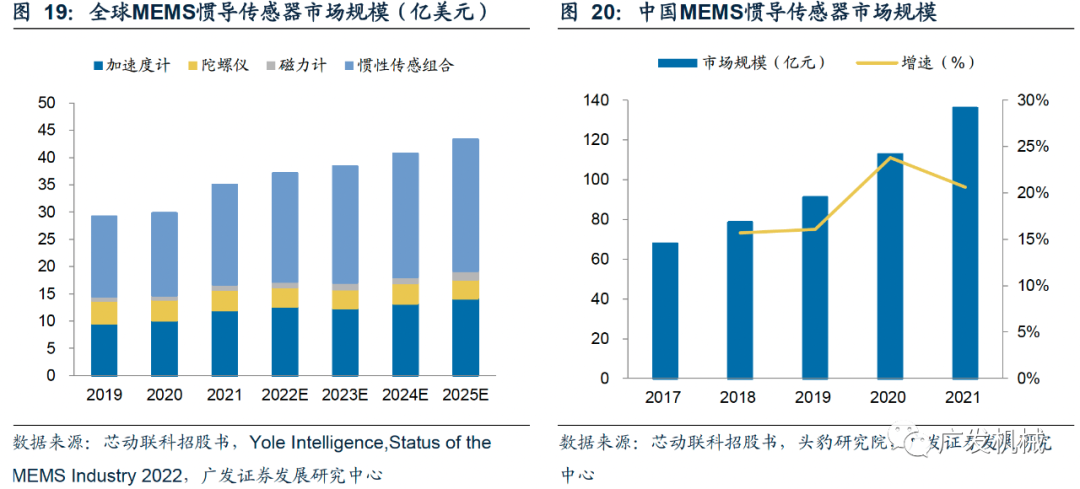
惯导传感器按技术原理分为MEMS(微电子机械系统)、FOG(光纤陀螺仪)和ROG (激光陀螺仪)。MEMS惯导传感器在精度上逊色于另外两种技术路线的惯导传感 器,但是由于价格便宜,体型小加上技术进步带来的技术提升,消费类、汽车、高端 工业、无人系统、高可靠等领域中对精度要求较低的应用场景主要应用MEMS陀螺 仪。
全球MEMS惯性导航传感器市场规模超230亿,中国市场超100亿。据芯动联科招股 书援引Yole发布的Status of MEMS Industry 2022中的数据, 2021年全球MEMS惯导 传感器市场规模约35.09亿元。据芯动联科招股书援引的头豹研究院数据,2021年中 国MEMS惯导传感器市场规模约136亿元,增速约为20.63%。
柔性传感器潜在市场空间超500亿,有望加速落地
柔性传感器开启智能传感新时代,潜在市场空间有望超500亿。柔性传感器是指采用柔性材料制成的传感器,具有良好的柔韧性、延展性,可以自由弯曲甚至折叠。柔性传感器采用了柔性基板,其本质上是一种薄膜,通常采用聚酰亚胺(PI)、聚酯(PET)、聚二甲基硅氧烷(PDMS)等材料制成。
从刚性到柔性的突破,极大拓展了传感器的应用场景,不仅是游戏领域中的智能穿戴设备,还有医疗大健康领域的电子皮肤、疾病诊断设备、健康监测设备、智能颈枕、智能按摩设备,消费领域的智能手环、元宇宙手套,智能家居领域的智能床垫,甚至是马斯克提出的脑机接口。
根据汉威科技微信公众号的数据,2021年至2028年全球柔性传感器市场的年复合增长率达6.8%,预计2028年可达84.7亿美元。
电子皮肤开启人机交互新模式,机器人和脑机接口是两大超级应用。
脑机接口是柔性传感器的一大应用领域。柔性脑机接口的代表企业为Neuralink,2022年11月,Neuralink已经向FDA提交了大部分文件,审核通过后约六个月内,将在人类身上植入第一个Neuralink植入物。至此,柔性脑机接口终于与大部队汇合,三种技术路线的侵入式脑机接口均已介入人体临床。脑机接口行业有望迎来产业化落地,也表明柔性传感器在细分应用场景下的进一步成熟。
机器人领域,电子皮肤的基本特征,是将各种电子元器件集成在柔性基板之上从而形成皮肤状的电路板,像皮肤一样具有很高的柔韧性和弹性,其能赋予机器人类似人类皮肤的敏感性,以及触觉、视觉、听觉、味觉和嗅觉等感知能力。电子皮肤可以广泛应用于手术机器人领域,医生佩戴电子皮肤可使手术机器人获取实时信息让手术更精准,而特斯拉推出人形机器人后,电子皮肤在机器人领域的产业化进度有望进一步被加快。
柔性传感器国内外企业齐发力,学术研究为高阶性能蓄力。目前,电子皮肤的研究已经取得一些进展,奥地利格拉茨技术大学最新研究的智能皮肤每平方毫米有2000个单独的传感器,但当前电子皮肤仍存在兼顾高柔性和高弹性难题、扩展性难题和制造成本高等痛点。
从国内外知名研究团队和公司看,Interlink是全球领先的人机界面解决方案提供商,其持续在力觉传感器上持续深耕,公司产品已被用于无数行业,包括汽车、机器人、医疗和消费电子产品等;国内企业中,汉威科技子公司能斯达在柔性压电传感器领域掌握自主知识产权,实现国产化完全替代,相关产品已在三甲医院进行临床实验,柔性微纳传感器目前已在智能机器人领域有明确的应用;科研团队当中,国内外主要的科研团队如美国加州大学、新加坡国立大学、美国斯坦福大学和中国科学院等对于柔性传感器、电子皮肤的研究进展皆处于迈向更高阶性能的阶段。未来,随着技术的持续进步,电子皮肤产业化进程有望加快落地。
柔性传感器打开想象空间,建议关注具备机器人应用潜力的国产标的:汉威科技,子公司能斯达开发的柔性微纳传感器已在智能机器人领域得到应用,该技术与电子皮肤兼容。
国产传感器市场现状,机器人逐渐迈入智能时代,重视传感器环节增量机会
传感器:传感器是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。
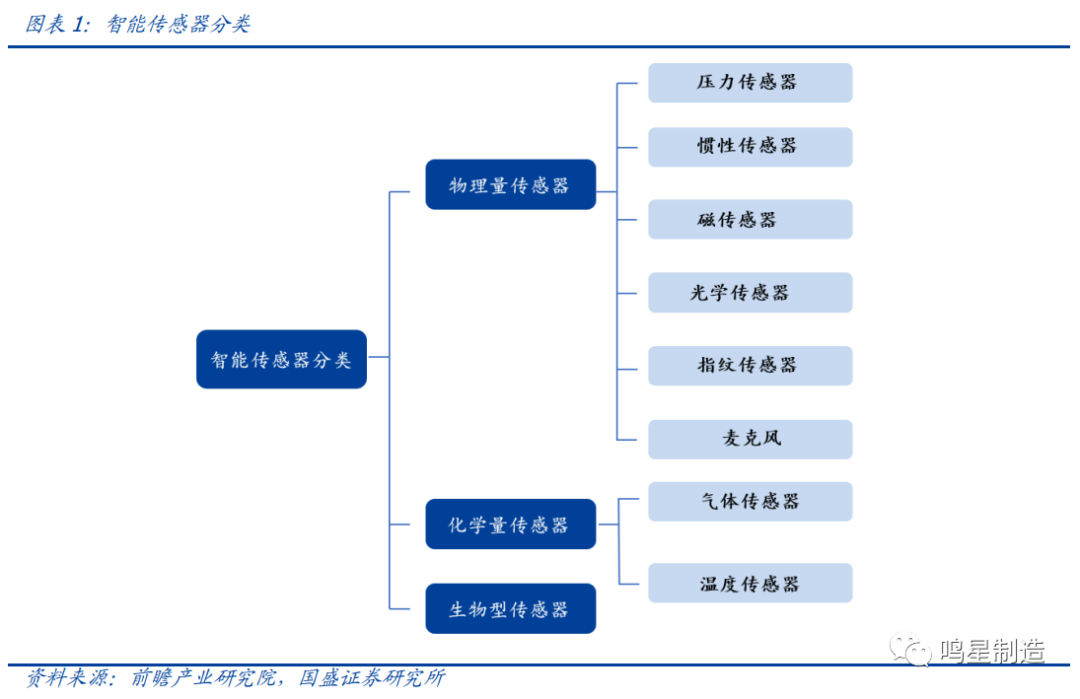
智能传感器集传感单元、通信芯片、微处理器、驱动程序、软件算法等于一体,具有信息采集、信息处理、信息交换、信息存储等功能。按照外界输入的信号变换为电信号采用的效应,可将传感器分为物理量传感器、化学量传感器和生物型传感器三大类,按照“工作原理+应用领域”的分类依据具体展开,可分为压力传感器、惯性传感器、磁传感器、光学传感器等。
万物互联的底座,智能传感器下游行业应用广泛。从发展历程看,传感器经历了结构型、固体型、智能型三个阶段,而前两类传感器,已经无法满足当今时代对数据采集、处理等流程的需求,因此,融合了AI技术的智能传感器开始受到关注。
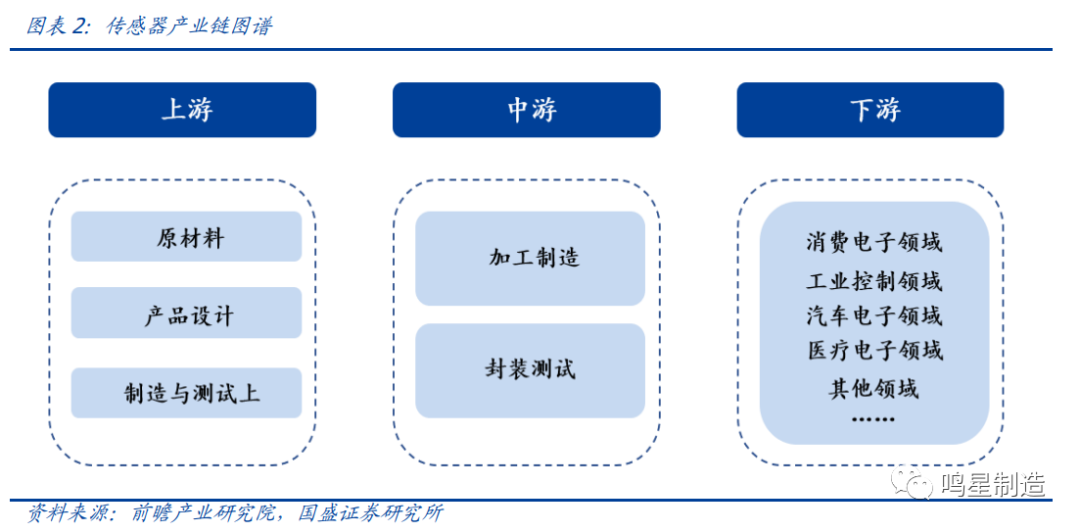
当前,智能传感器在工业4.0时代扮演着十分重要的角色,其是是物联网技术的最底层和最前沿,对物联网产业发展有着十分重要的意义。从产业链角度来看,智能传感器上游主要为设计、原材料以生产设备供应,下游涵盖多个领域,包括消费电子、工业控制、汽车电子、医疗电子等。
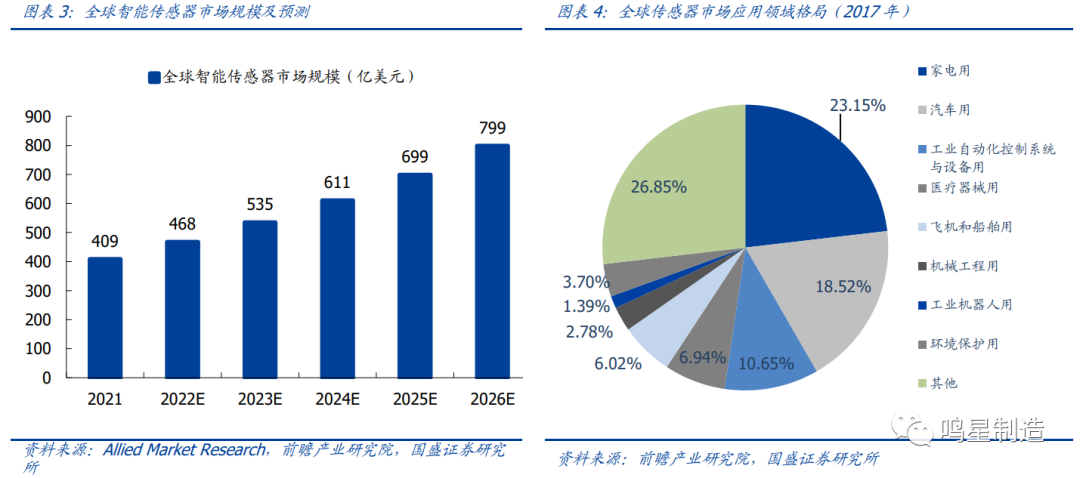
市场空间将逾500亿美元,家电+汽车+工控是智能传感器的主要应用领域。根据Allied Market Research的预测,2020-2026年,全球智能传感器市场规模年均增速有望超过14%,预计到2026年,全球智能传感器市场规模接近800亿美元。从具体的下游分别看,智能传感器主要聚焦在消费类产品和工业类产品,2017年家电和汽车分别占比达到23.15%和18.52%,占主要部分。此外,工控、医疗、飞机和船舶等领域对智能传感器的使用量也较为普遍。
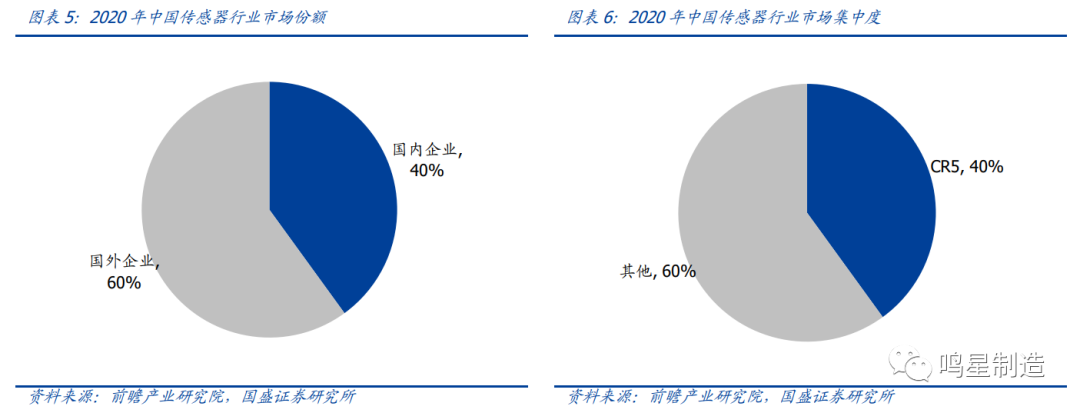
国内市场仍由外资主导,高端传感器芯片约 80%依赖海外。当前,我国传感器市场仍 旧由外资主导,国内供给能力略有不足,全球龙头企业如爱默生、西门子、博世、意法 半导体、霍尼韦尔等跨国公司占据约 60%的国内市场份额,尤其在高端市场,约 80%的 传感器芯片依赖海外企业,剩余的份额也只要集中在几家上市公司手中。从国内格局看, 当前市场较集中,我国传感器行业 TOP5 企业占据了国内传感器市场约 40%以上的份额, 其余约 60%为中小企业,产品或主要集中在中低端,或未实现大规模应用。
本文部分资料来自:
广发证券《传感器行业研究:万物互联之眼,数据之源》,未来智库
国盛证券《机器人硬件拆解2:视觉与力控》,鸣星制造
国盛证券《人形机器人配套:柔性传感器-电子皮肤,脑机接口》,ForceInstitute
您对本文有什么看法?欢迎在传感器专家网公众号本内容底下留言讨论,或在中国最大的传感社区:传感交流圈中进行交流。
您对本文有什么看法?欢迎留言分享!
顺手转发&点击在看,将中国传感产业动态传递给更多人了解!
审核编辑 黄宇
-
传感器
+关注
关注
2551文章
51163浏览量
754148 -
机器人
+关注
关注
211文章
28466浏览量
207310
发布评论请先 登录
相关推荐
国产传感器罕见的时代机遇,是120万亿机器人市场
nao机器人与其他机器人的区别
工业机器人产业如火如荼 带来智能装备机遇期
中国工业机器人制造业成全球最大应用市场
盘点工业机器人常见的六种传感器类型
机器人传感器的类别和应用原理
传感器将成为机器人无可替代的依赖之一
全面分析:人形机器人快速发展,哪些国产传感器将受益?(深度报告)

120万亿机器人市场带火国产传感器,哪些有望率先打破垄断?(全面分析)





 工商网监
工商网监
评论