 构建RTOS Kernel指南 (下)
构建RTOS Kernel指南 (下)
1优先级查找
位图是指一组连续的标志位,是一种常见的优先级框架的实现方式。每个比特位通常用来对应一个优先级,越低位的优先级越高,其状态标识该优先级是否有就绪状态的任务。以下图32位为例,存在优先级为1、7、9、16……24、25、31的就绪态任务。每个优先级存在对应的任务链表,同一个优先级中采用“先就绪先执行”的原则。 图1 位图
图1 位图
那么,CPU的任务从“寻找优先级最高的任务”变成了“寻找位图中最低位的1”。如果按照上图中依次按位查找,速度是较慢的,系统的实时性可能会有一定程度的影响,下面介绍一种较为巧妙的方法——分组查表法。 图2 分组查表法
图2 分组查表法
const rt_uint8_t __lowest_bit_bitmap[] =
{
/* 00 */ 0, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,
/* 10 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,
/* 20 */ 5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,
/* 30 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,
/* 40 */ 6, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,
/* 50 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,
/* 60 */ 5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,
/* 70 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,
/* 80 */ 7, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,
/* 90 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,
/* A0 */ 5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,
/* B0 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,
/* C0 */ 6, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,
/* D0 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,
/* E0 */ 5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0,
/* F0 */ 4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0
};
int __rt_ffs(int value)
{
if (value == 0) return 0;
if (value & 0xff)
return __lowest_bit_bitmap[value & 0xff] + 1;
if (value & 0xff00)
return __lowest_bit_bitmap[(value & 0xff00) >> 8] + 9;
if (value & 0xff0000)
return __lowest_bit_bitmap[(value & 0xff0000) >> 16] + 17;
return __lowest_bit_bitmap[(value & 0xff000000) >> 24] + 25;
这种方法将32位共分成4组,每组8位,那么每组的8位二进制数0x00~0xFF对应数组bitmap的序号0-255,数组中的值的含义为其对应8位二进制数最低位“1”的序号。那么通过这样巧妙的分组查表方式,通过至多四次查找,便可得到位图的最低位“1”的位置。除此之外,还有更为巧妙的利用汇编指令CLZ和RBIT组合实现这个目的,其中CLZ可以统计出现“1”的最高位位置,RBIT是数据进行按位反转的指令。这样就可以先通过RBIT进行位反转,再通过CLZ获取反转后最高位“1”的位置,即原数据中最低位“1”的位置。
2临界区保护和线程同步
在RTOS中,时常会出现多个线程访问公用资源的情况,即都需要访问公用的程序片段,如若没有对应的处理机制,可能会对系统造成意想不到的混乱。常用的方法有调度器上锁和禁止中断,这两者相互依赖,例如在调度器上锁时需要禁止中断。除此之外,还可以采用互斥机制来进行临界区保护,如信号量和互斥量,这两者也用于线程的同步机制。
 图3 信号量类比
图3 信号量类比

图4 互斥量类比
互斥量的作用类似于二值信号量,它是一种特殊的信号量,只具有“上锁”和“解锁”两种状态,对应的临界资源具有极强的排他性。就像景区的豪华单间卫生间,每个人在使用的时候都不能被打扰。虽然功能类似,但是二值信号量和互斥量还是有区别的,后续会进行相应的介绍。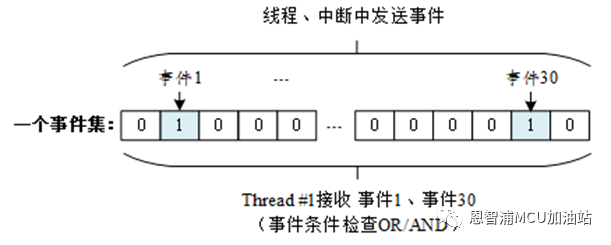 图5 事件集工作原理
除了信号量互斥量,还有一种有趣的同步机制-事件集,它通常可以用一个32位二进制数表示,每一位代表了一个事件,也可以说成一种触发条件,而事件集的作用便是可以用“逻辑或”和“逻辑与”自由组合出想要触发的条件,就好像“明天天气好”和“我心情愉悦”都发生,“我出去郊游”才会触发,又像“发表一篇论文”或“发明一项专利”任一发生,都触发“达成硕士毕业标准”。
图5 事件集工作原理
除了信号量互斥量,还有一种有趣的同步机制-事件集,它通常可以用一个32位二进制数表示,每一位代表了一个事件,也可以说成一种触发条件,而事件集的作用便是可以用“逻辑或”和“逻辑与”自由组合出想要触发的条件,就好像“明天天气好”和“我心情愉悦”都发生,“我出去郊游”才会触发,又像“发表一篇论文”或“发明一项专利”任一发生,都触发“达成硕士毕业标准”。3优先级反转问题
当隐入互斥量的机制后,读者可以思考一下,这会不会和优先级机制产生冲突?
一个是根据优先级制定的“国家法律”,一个是根据临界资源制定的“地方法律”,当遵守“地方法律“的时候会不会违背“国家法律”?这就是优先级反转问题。
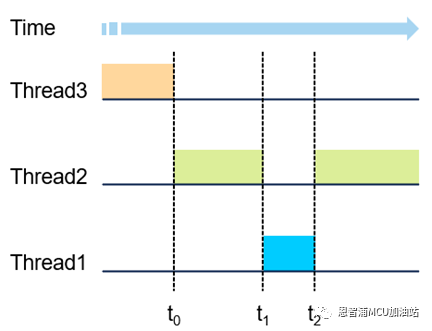 图6 优先级反转
图6 优先级反转
如上图,假设我们有三个线程,它们的优先级Thread1 > Thread2 > Thread3,t0之前Thread3获取某资源的互斥量,互斥量值变locked状态,t0时刻Thread2线程就绪,由于优先级Thread2 > Thread3,Thread3让出CPU执行权给Thread2,但没有解开互斥量。到t1时刻,Thread1就绪,Thread2让出CPU,Thread1执行过程申请Thread3所占有的互斥量,由于互斥量为locked状态,在t2时刻Thread1被挂起等待,剩余两个就绪态的线程Thread2优先级高于Thread1,因此继续执行。
至此,我们发现,都处于就绪态的线程,低优先级的Thread2反而能比高优先级的Thread1优先执行,其原因是更低优先级的Thread3占有信号量并被抢占,造成了优先级反转。所以为了让“地方法律”更加适配“国家法律”,常用的做法是优先级继承。即可以让Thread3短暂地提升到Thread1的优先级,得以抢占CPU快速执行完将互斥量解锁,从而让Thread1及时获取到互斥量得以执行。除此之外,还存在一些另外的处理方式,如优先级天花板等,有兴趣的读者可以自行查阅相关资料。
二值信号量和互斥信号量非常类似,但还是有一些细微的差别。互斥信号量拥有优先级继承机制,而二值信号量没有。互斥量必须是同一个任务申请,同一个任务释放,其他任务释放无效,且同一个任务可以递归申请。然而对于二值信号量,一个任务申请成功后,可以由另一个任务释放,因此二值信号另更适合用于同步(任务与任务或任务与中断的同步),互斥信号量适合用于简单的互斥访问。
4线程间通信
线程间通信主要是通过消息队列和邮箱实现,消息队列一般采用先进先出的原则(FIFO),而邮箱可以理解成队列长度为1的特殊消息队列,但是消息队列中为待传输的数据按值拷贝的副本,所以支持各种类型的数据的传递,而邮箱中传输的通常为指向待交换数据的指针。5总结
至此,一个RTOS的内核功能基本就实现了,下面对一个RTOS Kernel应具备的功能进行分条总结:
实时性:实时系统对任务的响应时间要求较高。具备严格的按优先级调度任务的机制,并且一般要支持抢占式调度。
多任务调度:RTOS需要能够同时管理多个任务,并合理分配CPU时间片给每个任务。设计任务调度算法以确保相同优先级的任务能公平使用CPU,避免优先级反转问题,并提供优先级继承、优先级天花板等机制。
同步和通信:多任务系统中,任务之间需要进行同步和通信。设计合适的同步机制,如信号量、互斥锁、消息队列等,并确保在多个任务之间实现可靠的数据传输和共享。
但是,这些仅仅是内核的基本功能,一个成熟的RTOS还应该具有更多的扩展功能予以支撑。例如内存管理功能、外设驱动的支持、硬件依赖性和可移植性、调试和测试功能等等。罗马非一日而建,希望大家都能脚踏实地,乐于钻研,乐于进步,共勉!
END
更多恩智浦AI-IoT市场和产品信息,邀您同时关注“NXP客栈”微信公众号

NXP客栈
恩智浦致力于打造安全的连接和基础设施解决方案,为智慧生活保驾护航。
长按二维码,关注我们
恩智浦MCU加油站
这是由恩智浦官方运营的公众号,着重为您推荐恩智浦MCU的产品信息、开发技巧、教程文档、培训课程等内容。

长按二维码,关注我们
原文标题:构建RTOS Kernel指南 (下)
文章出处:【微信公众号:恩智浦MCU加油站】欢迎添加关注!文章转载请注明出处。
-
mcu
+关注
关注
146文章
17171浏览量
351495 -
恩智浦
+关注
关注
14文章
5863浏览量
107606
原文标题:构建RTOS Kernel指南 (下)
文章出处:【微信号:NXP_SMART_HARDWARE,微信公众号:恩智浦MCU加油站】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

深入解析Zephyr RTOS的技术细节

Openharmony软件评估指南-米尔瑞芯微RK3568开发板
freertos和rtos区别是什么
RTOS与Linux有什么区别
RTOS的特性和类型
RTOS开发最佳实践
什么是实时操作系统(3)-在 RTOS 中可以期待什么?

是否可以扩展esp_iot_rtos_sdk以具有api功能来进行云更新?
ESP8266_RTOS_SDK LWIP构建失败怎么解决?
ESP8266_RTOS_SDK-v3.4的构建错误如何解决?
如何为ESP8266构建自定义盾牌?
请问cyw20719或cyw20721是否支持RTOS?
基于RTOS的应用进程中的典型线程






 工商网监
工商网监
评论