 南京大学在微纳仿生机械手设计及操控方面取得研究成果
南京大学在微纳仿生机械手设计及操控方面取得研究成果
近年来,微纳仿生机器人在疾病精准诊断、药物研发和递送以及MEMS/NEMS等前沿应用领域受到越来越多的关注。其中,开发具有高度灵活性和精准操作性的微纳仿生机器手(Bionic gripper robotics)结构被认为是实现精确递送、微观组装和功能调控等核心功能不可或缺的关键技术能力。然而,目前基于微加工或组装工艺制备的机械手通常尺寸较大(毫米~厘米量级),并且传统的静电、电热或应力驱动方式依赖较高驱动电压且制动时间较长,不利于实现更高精度、多维度和更灵活的操控需求。
据麦姆斯咨询报道,针对上述技术挑战,南京大学余林蔚教授团队提出了一种基于超细晶硅纳米线(nanowires, NWs)定位生长和形貌编程能力实现的极简仿生机械手可靠制备和仿生微纳机械手操控应用策略。首先,基于课题组自主创新的(In-plane solid-liquid-solid, IPSLS)纳米线生长模式,引导生长具有反嵌套Ω环形状的超长、精细(直径约100 nm)晶硅纳米线;其次,将之组装成为悬空导电沟道,在磁场背景下通过可精确调控的驱动电流,产生由纳米线形貌定向的洛伦兹力,激励微纳机械手实现一些列高灵活、大振幅和多维度的三维夹取、翻转、扭动和释放等类手指(finger-like)仿生操作能力。
由于采用超细纳米线作为机械手支架,并融合了IPSLS纳米线独特的柔性形貌设计优势,此微纳仿生机械手可以在较低的交流驱动电流下实现多模态高频振荡(甚至谐振),对于克服在微观世界中普遍存在的粘性范德华力,实现可靠且精准地载荷释放,提供了十分有利的调控新维度。最后,基于该机械手的“双手协同”还成功地展示了对micro-LED单元的准确拾取、在线测试和定位安装。此“单纳米线塑形”(single nanowire morphing)极简微纳制备和洛伦兹力驱动策略将为快速设计、定形和验证各类新颖仿生机器手提供一个极其方便、灵活和强大的制备应用平台,并有望在微生物/细胞操纵、基因工程、精密组装和高灵敏探测等前沿领域得到广泛应用。
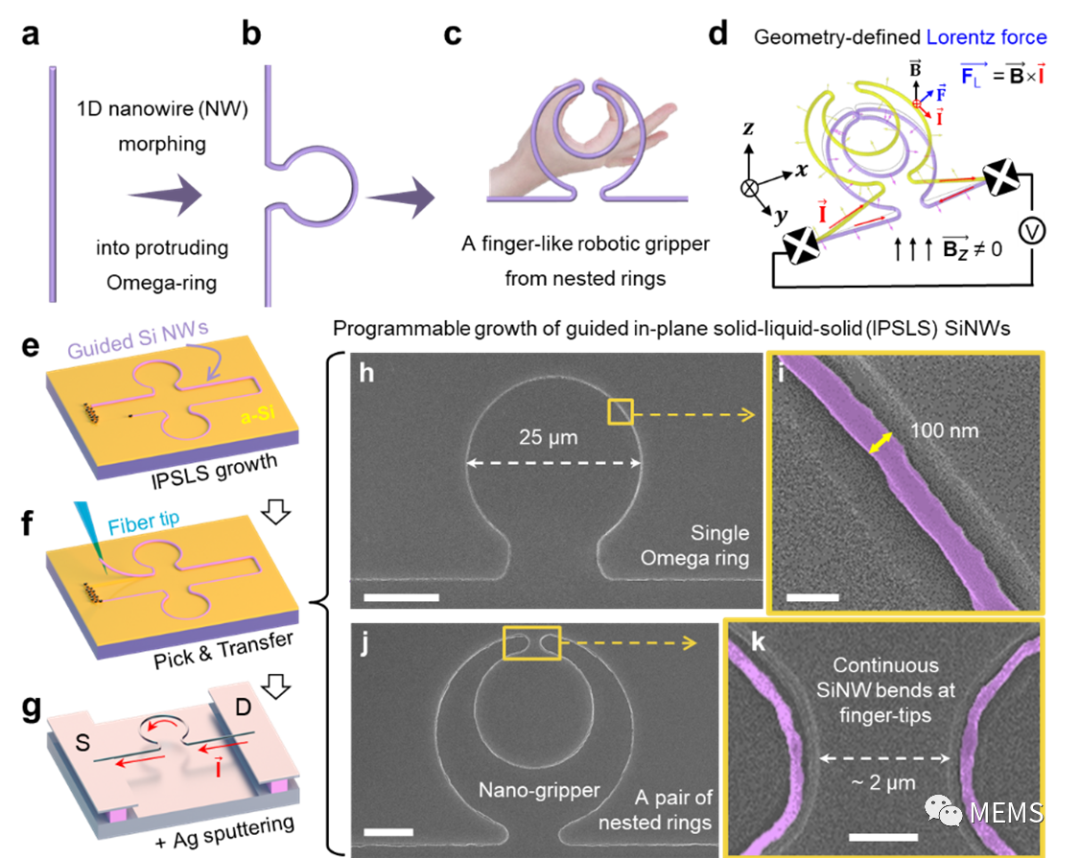
图1 单纳米线塑形设计思路及微纳仿生机械手“定位、定形”引导生长、制备和组装工艺流程。
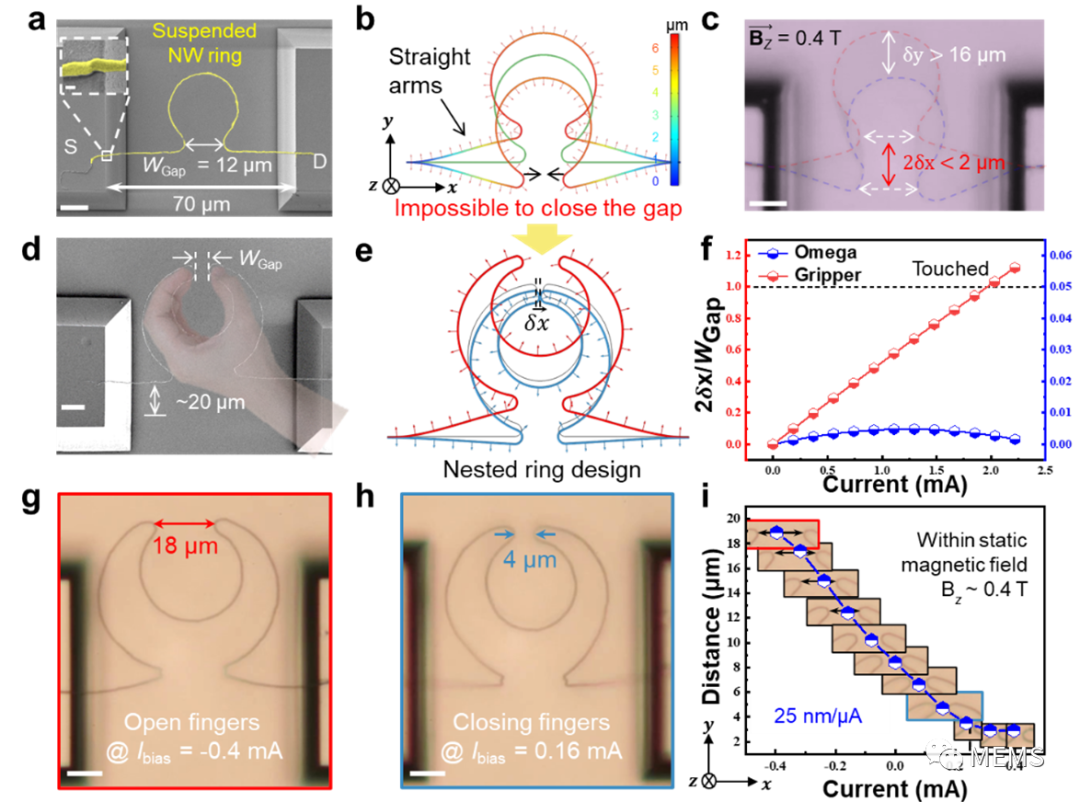
图2 洛伦兹力驱动下微纳仿生机械手“抓合-释放”操控。
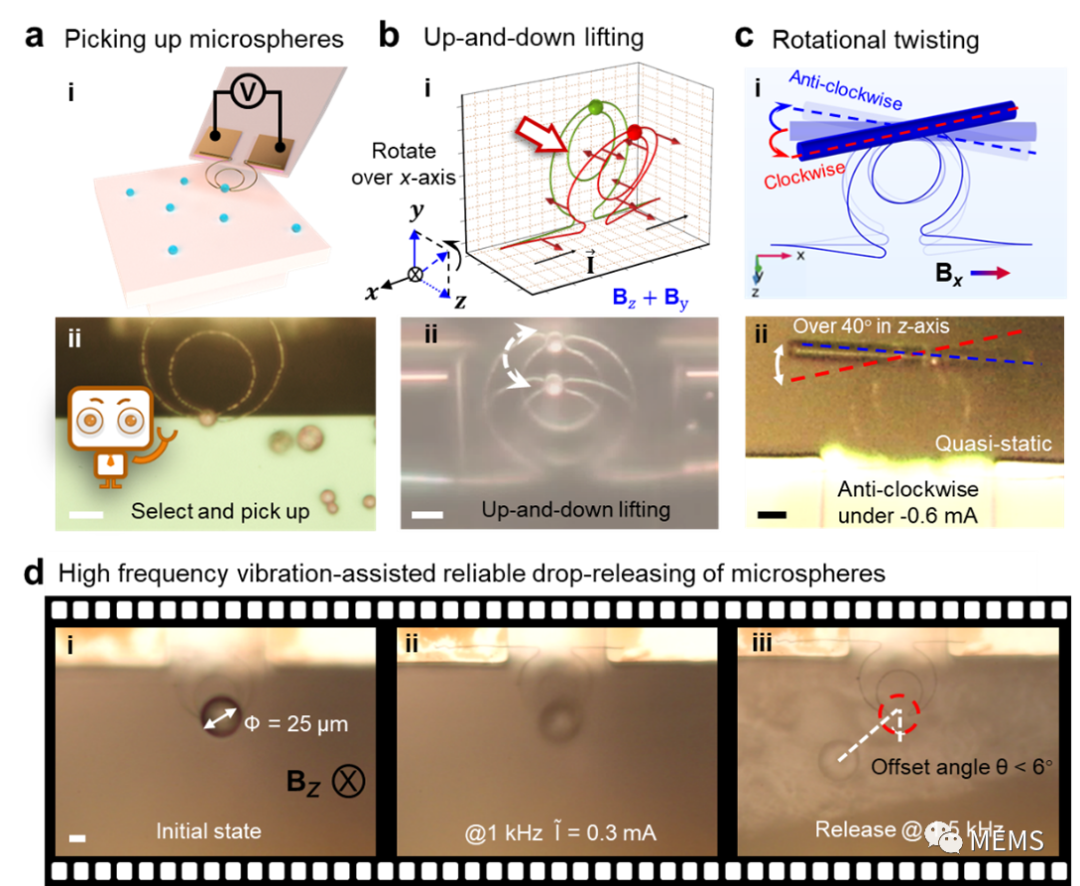
图3 微纳仿生机械手精准拾取、多维操作和振动辅助负载释放。
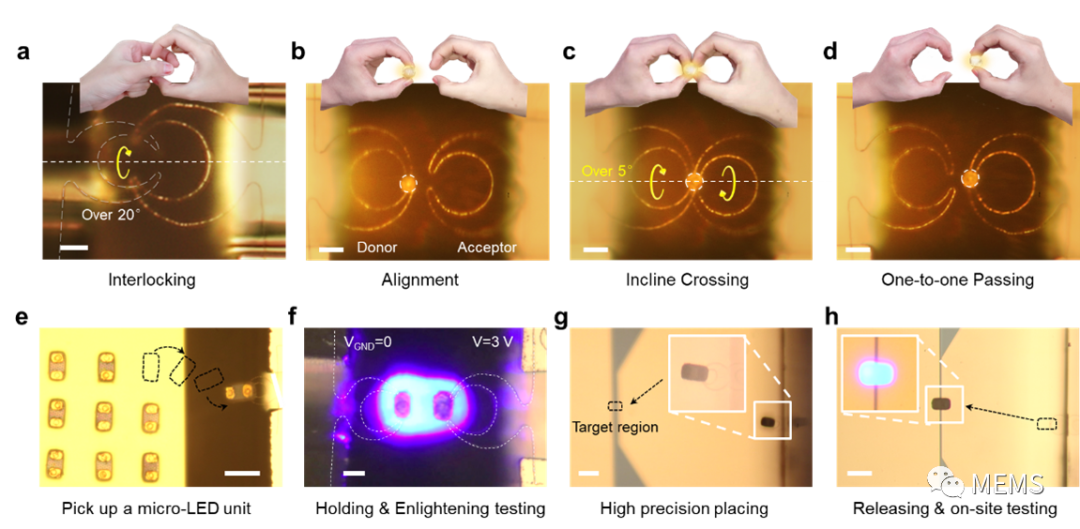
图4 微纳仿生机械手“双手协同”操作实现微球传递以及微型LED点亮。
上述工作以“Ultracompact single-nanowire-morphed grippers driven by vectorial Lorentz forces for dexterous robotic manipulations”为题发表于《Nature Communications》期刊。其中,南京大学电子科学与工程学院博士生严江同学为论文第一作者,余林蔚教授和刘宗光副研究员为论文通讯作者。此工作的开展得到了南京大学陈坤基教授、徐骏教授、施毅教授和王军转教授的支持和指导,以及国家自然科学基金重大研究计划重点项目、面上和青年项目的资助。
审核编辑:刘清
-
mems
+关注
关注
129文章
3945浏览量
190782 -
单晶硅
+关注
关注
7文章
191浏览量
28295 -
驱动电流
+关注
关注
0文章
83浏览量
16062 -
仿生机器人
+关注
关注
1文章
70浏览量
15263 -
Micro LED
+关注
关注
5文章
614浏览量
19292
原文标题:南京大学在微纳仿生机械手设计及操控方面取得研究成果
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
中国移动与南京大学合作研发高保真2D数字人说话系统
南京大学:研发水凝胶传感器动态保水新策略

SynSense时识科技与海南大学联合研究成果发布

机械手 OEM 的应用
创新研究不停步,南京大学采购了南京大展的DZ-STA200同步热分析仪

【品质见证,智慧之选】南京大学选购了南京大展仪器的差示扫描量热仪

机器视觉控制机械手的具体过程
中央民族大学采购多台南京大展的热重分析仪

PLC在机械手控制系统中的具体应用
深圳大学采购南京大展的导热系数测试仪,开启材料科学新研究

未来的眼睛: 南京大学团队研发出眼动追踪隐形眼镜
哈尔滨工业大学在微纳光学领域取得重要进展






 工商网监
工商网监
评论