 电气自动化控制专业术语大全 / 基本的模块电路及原理
电气自动化控制专业术语大全 / 基本的模块电路及原理
控制系统的第一代产生于1930年到1940年,主要代表是以基地式仪表为代表的机械控制技术。第二代产生于1950年,主要是电气控制技术为主的继电器控制技术和调节器为代表的模拟控制技术。目前所称的控制系统是第三代控制系统,诞生于二十世纪七十年代,主要技术代表是用于流程工业的集散控制系统(DCS)和用于离散工业的可编程控制器(PLC)。
为了正确理解控制系统的意义,有一些关于控制的术语是必须要了解的,在这里介绍一下。
I/O点
在讨论控制系统的时候,I/O点是最经常听到的一个术语。它是指输入/输出点,I代表INPUT,指输入,O代表OUTPUT,指输出。输入/输出都是针对控制系统而言,输入指从仪表进入控制系统的测量参数,输出指从控制系统输出到执行机构的参量,一个参量叫做一个点。一个控制系统的规模有时按照它最大能够控制的I/O点的数量来定的。
模拟量和开关量
在控制系统中,另一个常见的术语就是模拟量和开关量。不论输入还是输出,一个参数要么是模拟量,要么是开关量。模拟量指控制系统量的大小是一个在一定范围内变化的连续数值,比如温度,从0-100度,压力从0-10MPA,液位从1-5米,电动阀门的开度从0-100%,等等,这些量都是模拟量。而开关量指该物理量只有两种状态,如开关的导通和断开的状态,继电器的闭合和打开,电磁阀的通和断等等。
对控制系统来说,由于CPU是二进制的,数据的每位有“0”和“1”两种状态,因此,开关量只要用CPU内部的一位即可表示,比如,用“0”表示开,用“1”表示关。而模拟量则根据精度,通常需要8位到16为才能表示一个模拟量。最常见的模拟量是12位的,即精度为2-12,最高精度约为万分之二点五。当然,在实际的控制系统中,模拟量的精度还要受模拟/数字转换器和仪表的精度限制,通常不可能达到这么高。
控制回路
通常是针对模拟量的控制来说,一个控制器根据一个输入量,按照一定的规则和算法来决定一个输出量,这样,输入和输出就形成一个控制回路。控制回路有开环和闭环的区别。开环控制回路,指输出是根据一个参考量而定,输入和输出量没有直接的关系。而闭环回路则将控制回路的输出再反馈回来作为回路的输入,与该量的设定值或应该的输出值作比较。闭环回路控制又叫反馈控制,是控制系统中最常见的控制方式。下面介绍几种常规的反馈控制的模式。
二位控制
这是最简单的反馈控制,有时也叫开关控制。这种控制是当被测量达到最高值或最低值的时候,就给出一个开关的信号。虽然被测量可能是模拟量,但控制输出是开关的,所以叫两位控制。在工业现场,有许多温控器和液位开关控制是采用这种方式的。
比例控制
控制器的输出值与被控参数的测量值和设定值或某个参考点的偏差是一个比例关系。比例控制比二位控制要平滑一些,消除了二位控制时会产生的被控量上下振荡的情形。比如,对一个反应罐的液位,如果设定的液位值是2700毫米,当液位降低时,进料管道上的阀门就要增加开度,而液位偏高时,则要将开度减小。增加和减小的比例与液位和设定值的偏差大小成比例关系。
积分控制
在积分控制中,被控变量的值的变化与控制系统输出控制到实际生效的时间有一个预先设定的关系。执行机构的输出是渐渐地达到设定的值的。这种控制方式的产生是由于实际的控制元件和执行机构从给出输出信号到使被控变量达到设定值往往需要一段时间。
最常见的例子是温度控制,比如,假定我们知道到煤气阀门的开度到60%的时候,热水器的水温能够达到适宜洗澡的45度,但是,当你把阀门一下子拧到60%的位置时,水依然是凉的,你必须等一下,水温升到45度左右的时候,就会稳定。如果控制系统不用积分控制,而只用比例控制,那么当阀门输出为60%时,这是输入的温度值可能依然只有20度,那么按照比例控制,既然偏差依然存在,则阀门的开度会继续加大,这样,当水温升到45度时,阀门的开度可能会达到了90%甚至更高,这时,虽然控制系统会通知阀门保持不动,但水温会继续升高,可能到了50甚至60度,这时,阀门的开度会减小,但在减小到60%之前,水温都会继续上升,当阀门开度减到60%时,水温依然可能70度,一直当阀门的开度变成20%时,水温才会变成45度,这时阀门运动会停止,但水温却会继续下降,直到变成凉水,如果这时是冬天,可能你的情形还要糟糕。这就是没有积分控制的温度控制器会发生的情况。如果你有小孩,当孩子第一次操作热水器的阀门的时候,发生的情形就很像这种情况。
微分控制
微分控制通常与比例和积分控制同时使用,由于积分控制有一个滞后,微分控制可以让控制对偏差的反应提前,以免控制系统的反应过于迟钝。微分控制与比例和积分控制同时使用,可以使被控状态更迅速地达到稳定状态,而又不会出现上文出现的振荡现象。
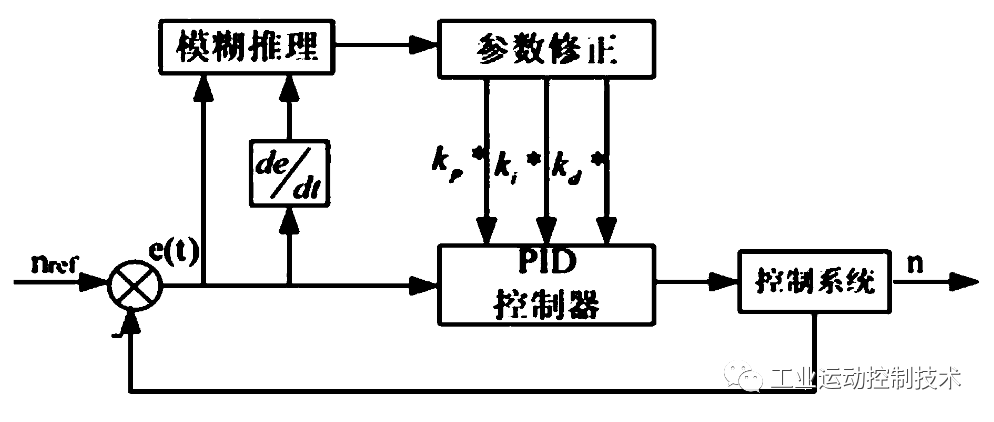
PID 控制
在实际的控制系统中,根据实际变量的情况,上述三种控制方式有时只有一种,有时是两种,有时三种同时采用。比例控制用P表示,积分控制用I表示,微分控制用D表示,根据采用的方式,分别称为P控制,PI控制,PID控制。其中,PID控制是控制系统最常见的控制模式。
延时控制
通常应用在开关量控制的场合,当一个开关状态变化时(比如由开变关时),控制器的输出动作要延时一段时间才会给出。比如,在生产线常用的接近开关,当工件就位时,接近开关给出信号,下一个滚筒由于和接近开关安装的位置有一段距离,所以通常要延迟几秒才开始滚动。
连锁控制
也是常用于开关控制的场合,比如有三个开关,A、B和C,C开关必须在A和B同时打开的时候,才能够打开;或者当A打开时,C必须打开;这种关系就是连锁控制。在工业现场中,尤其是在涉及安全控制的场合,连锁控制方式是很常见的。比如反应釜中的放散阀,当压力达到一定值时,压力开关的信号发生变化,则放散阀门必须立刻打开。
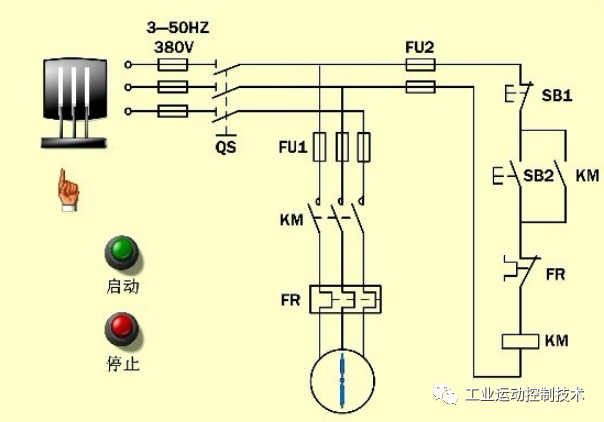
电动控制
指控制系统的输出是通过电气量或电子信号来进行的,所控制的对象是电动执行元件,比如继电器、步进开关、电磁阀、伺服驱动器和变频器等等,绝大部分的自动控制多多少少都会有电动控制元件。
液压控制
在机器与设备的操作中,许多控制是用液压控制机构来进行的。在连续速度控制的场合,液压控制通常比较方便和便宜,当能量转换效率较高的时候,液压控制往往和电动控制中的伺服控制同时使用。这时,就形成了效率和精度较高的电液执行机构。
气动控制
有三种情形用到气动执行机构:
1、运动的线路上有标准的单向气动阀门组合来完成控制逻辑功能;
2、在气体管道中采用一些没有移动部件的元件,这些元件是依靠流过的气体的特性而进行开关动作的;
3、运动的逻辑控制系统,采用模块化的内置隔膜、绕线或套筒式。这三种气动元件都是采用压缩空气作为传输信号或执行机制的动力。在工厂中,由于压缩空气容易获得,干净、无污染,又安全,控制的功能和设计都十分简单,因此,现在许多生产线上采用气动工具。
-
模块
+关注
关注
7文章
2670浏览量
47332 -
电气
+关注
关注
18文章
1156浏览量
53015 -
控制
+关注
关注
4文章
1010浏览量
122616 -
自动化
+关注
关注
29文章
5508浏览量
79080
发布评论请先 登录
相关推荐
高压电气试验的分类及专业术语介绍
机械自动化和电气自动化区别是什么
14芯M16公头连接器专业术语

继电器在工业自动化领域的应用
蓝牙模块在工业自动化中的应用
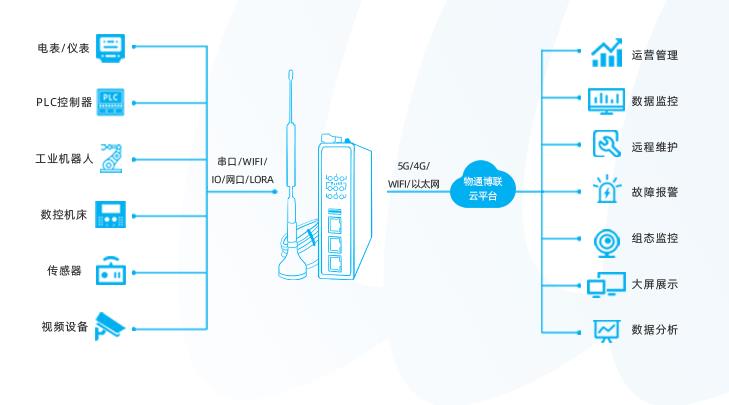
PLC电气自动化实验台远程监控运维管理系统
工业自动化中的控制方式
如何实现PLC的自动化控制逻辑
光通信行业专业术语解析大全
DC电源模块在工业自动化中的应用案例分析

SMT贴片加工常见的专业术语分享
SSD入门必看|这些专业术语你知道多少?
电源测试怎么自动化?电源模块自动化测试系统如何实现?





 工商网监
工商网监
评论