 三维目标检测之OpenPCDet环境配置及demo测试
三维目标检测之OpenPCDet环境配置及demo测试
00实验环境
·Ubuntu 16.04
·RTX 2080
·CUDA 10.1
01安装步骤
1.1 安装之前
1.1.1 验证cmake版本
cmake--version
cmake版本要大于等于1.13,不然后边的库的setup过程会报错。不要看网上的博客盲目执行pip install cmake或者apt-get autoremove cmake,这样会导致出一些额外的错误。我参考的是这篇博客进行cmake的升级。
1.1.2 验证cuda和cudnn是否安装好了
先说一下我遇到的问题,因为这次的机子是我接手别人的,里边看似是cuda和cudnn都配置好了,但是后边运行的时候还是过不去。
nvcc -V和nvidia-smi两个命令显示的cuda是不一致的,这个问题不大。
主要看nvcc -V这条命令显示的cuda版本。nvidia-smi所显示的cuda是,这个台机器安装驱动所能带动的最大cuda版本,nvcc -V显示的cuda版本才是运行是的版本。
一般来说nvidia-smi所显示的版本要高一些。但是,我这台机器nvcc -V所显示是10.2,nvidia-smi所显示的是10.1,本着能不改驱动就不改驱动的原则(担心ubuntu的黑屏),我把~/bashrc中的环境变量改成了10.1版本的。
nvcc-V#显示安装的cuda版本 cat/usr/local/cuda/include/cudnn.h|grepCUDNN_MAJOR-A2##显示安装的cudnn版本
下边所有库安装好之后,最好验证一下是否安装成功,成功后,再进行下一步,否则后边容易出错,且难定位。
1.2 配置环境,安装需要的库
1.2.1 创建虚拟环境
创建虚拟环境
1.2.2 进入该虚拟环境
condaactivateopenpcdet
1.2.3 安装pytorch
注:安装的是gpu版本,安装之后可以测试一下,torch是否能调用cuda。
安装命令,建议去官网复制粘贴,不容易出现cuda和torch版本不匹配的问题。我没有换源,直接用下边的命令行,下载安装也非常快。
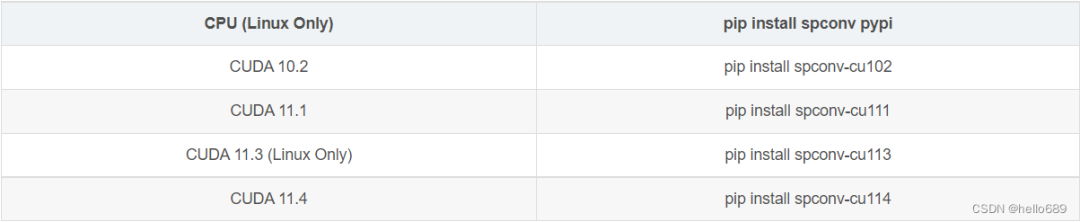
1.2.4 安装spconv
这一步比较容易出现问题。目前spconv出了2.0以上版本,而spconv2.只支持cuda10.2以上版本。
如果cuda版本合适,直接运行pip安装即可,像我的系统安装的是cuda10.1,只能老老实实下载原始的版本。
找个文件夹,开始安装spconv1.2:
#安装libboost sudo apt-get install libboost-all-dev # 下载spconv,并切换分支 git clone -b v1.2.1 https://ghproxy.com/https://github.com/traveller59/spconv.git cd spconv # spconv项目中的third_party对应的目录中有三个文件夹是空的,删除了就行; #下载pybind11这个包替换掉空文件,并把pybind11放入 cd third_party git clone https://ghproxy.com/https://github.com/pybind/pybind11 cd .. #退回 python3 setup.py bdist_wheel #如setup.py这一步报错,可能需要你删掉build/ dist/ spconv.egg-info/,这几个文件夹之后再编译 cd ./dist pipinstallspconv-1.2.1-cp37-cp37m-linux_x86_64.whl#先检查一下dist里边的文件,有可能是空的如果你所用的机子,可以安装spconv2.x:
方法一(pip安装): pip install spconv-cu102 -i https://pypi.tuna.tsinghua.edu.cn/simple 方法二(源码安装): #cumm 安装git clone https://ghproxy.com/https://github.com/FindDefinition/cumm cd ./cumm pip install -e . #spconv安装 git clone https://ghproxy.com/https://github.com/traveller59/spconv cd ./spconv pipinstall-e.cuda版本对应的spconv版本:
验证是否安装成功:
python importspconv1.3 安装OpenPCDet
命令:
gitclonehttps://ghproxy.com/https://github.com/open-mmlab/OpenPCDet.git cdOpenPCDet pipinstall-rrequirements.txt pythonsetup.pydevelop
注:numpy库不能太低,我的默认安装了1.16.0版本,后边报错信息不会直接显示numpy版本过低,而是显示No Module xxx,很难看出是numpy版本的问题。
验证pcdet是否安装成功:
python importpcdet02可视化部分
ros下的可视化,可以参考我另写的一篇博客。三维目标检测之ROS可视化
2.1 安装可视化库
首先需要安装可视化的库,mayavi或者open3d两者都可以,可以安装其中一个,也可以两个都安装。
我在安装mayavi的时候一直有问题,转而安装open3d,下边以open3d为例。
因为新版本不支持ubuntu16.04,所以我这里是指定的open3d版本号,这里要感谢这篇博客,之前没有考虑到open3d的版本选择跟ubuntu的版本号也有关系。
如果不是ubuntu18.04及以上版本,open3d的版本就可以高一些了。
conda install -c open3d-admin open3d==0.9.0 pipinstallopen3d-python
注:open3d的安装用conda来安装,pip安装一直会出问题。
验证open3d是否安装成功:
python importopen3d
如果有错误,可以到文中的第三部分(问题汇总),查看原因,可能是open3d版本不对,也可能是调用了~/.local中的open3d库。
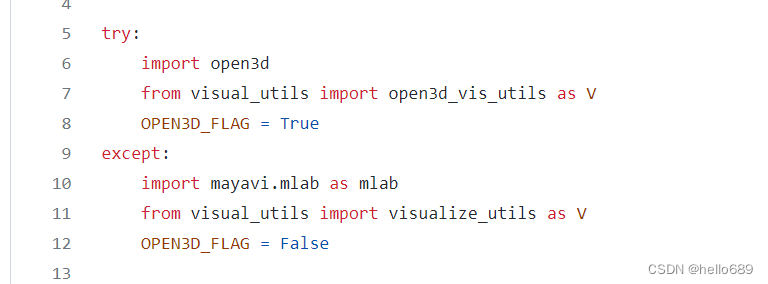
tools/demo.py文件中,优先使用的是open3d,如下图所示,如果想要用mayavi这个库的话,需要把try部分删了,只用except里边的部分。
2.2 测试
从官方下载,想要测试的网络模型。

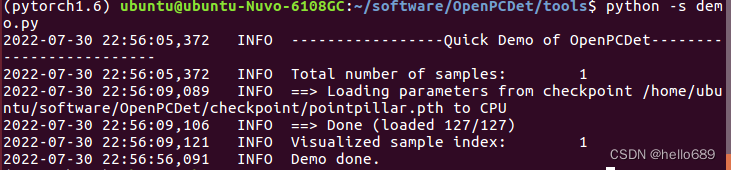
将训练模型和测试的点云数据放在合适的位置,执行下边的命令。
python3 demo.py --cfg_file cfgs / kitti_models / pointpillars.yaml --ckpt pointpillars.pth --data_path${POINT_CLOUD_DATA}我用的数据是kitti数据集中的000000.bin,选用pointpillars来进行测试;
测试结果:
03问题汇总
3.1 mayavi的问题:python3.8安装mayavi4.7.3
安装的顺序,安装的版本都有一定的要求,这几个的先后编译顺序不能颠倒。
pip install vtk==8.1.2 # 自动安装的vtk是9,会产生冲突 pip install mayavi==4.7.3 pipinstallPyQt5报错信息:
AttributeError:typeobject'DialogCode'hasnoattribute'Accepted'这个问题,我一直没解决,网上很多方法,在我的机子上都解决不了。
3.2 Open3d的问题:
如果遇到类似下边的情况,大概率为open3d版本问题导致。
情况一:
AttributeError:'open3d.geometry.PointCloud()'objecthasnoattribute'voxel_down_sample'
情况二:
ImportError:/lib/x86_64-linux-gnu/libm.so.6:version`GLIBC_2.27'notfound(requiredby/home/xxxx/xxxx/lib/python3.7/site-packages/open3d/open3d_pybind.cpython-37m-x86_64-linux-gnu.so)
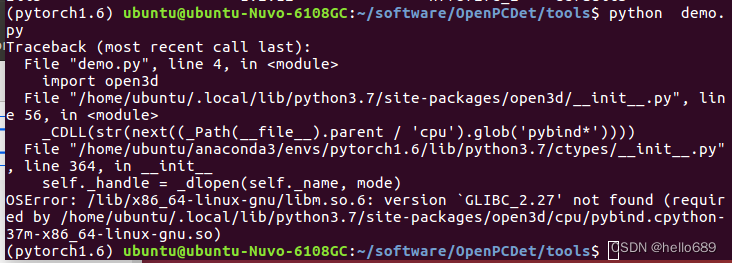
我在第二个问题上卡了一段时间,明明版本什么都对了呀,为啥运行demo.py的时候还是出错。
另外,因为我之前安装过open3d,所以在~/.local中有一个版本错误的open3d,在运行demo程序的时候,需要加上-s,-s可以让Python不去查找用户目录中的库。
python-sdemo.py
如何运行python而不在其模块搜索路径中包含~/.local/lib/pythonX.Y/sitepackages
3.3 运行demo时出错
情况一:段错误(核心已转储)
(pcdet) auto@auto-System-Product-Name:~/OpenPCDet/tools$ python demo.py --cfg_file cfgs/kitti_models/pv_rcnn.yaml --ckpt pv_rcnn_8369.pth --data_path ../data/kitti/testing/velodyne/000008.bin 2022-03-06 2126,628 INFO -----------------Quick Demo of OpenPCDet------------------------- 2022-03-06 2126,628 INFO Total number of samples: 1 /home/auto/anaconda3/envs/pcdet/lib/python3.7/site-packages/torch/functional.py UserWarning: torch.meshgrid: in an upcoming release, it will be required to pass the indexing argument. (Triggered internally at ../aten/src/ATen/native/TensorShape.cpp:2157.) return _VF.meshgrid(tensors, **kwargs) # type: ignore[attr-defined] 2022-03-06 2129,122 INFO ==> Loading parameters from checkpoint pv_rcnn_8369.pth to CPU 2022-03-06 2129,154 INFO ==> Done (loaded 367/367) 2022-03-06 2129,300 INFO Visualized sample index: 1 段错误 (核心已转储)
-
命令
+关注
关注
5文章
683浏览量
22011 -
Ubuntu
+关注
关注
5文章
563浏览量
29703 -
虚拟环境
+关注
关注
0文章
27浏览量
8930 -
pytorch
+关注
关注
2文章
807浏览量
13198
发布评论请先 登录
相关推荐
如何快速高效的完成汽车前盖板的三维检测?
【NanoPi Duo开发板试用体验】基于友善之臂的三维扫描仪-汇总帖-结项报告
广西扫描服务三维检测三维扫描仪
三维设计应用案例
MetraSCAN三维扫描仪对汽车钣金件三维扫描检测解决方案
Handyscan汽车三维扫描服务尺寸检测的应用
三维立体数字沙盘是是什么?
如何导入机械臂的三维模型
港中文和商汤研究员提出高效的三维点云目标检测新框架
手持式三维扫描仪对工业三维检测铸造模具冲压模具三维激光扫描与检测
手持式三维扫描仪对工业三维检测应用铸造模具冲压模具三维扫描与检测
基于激光雷达点云的三维目标检测算法
基于多视角融合的夜间无人车三维目标检测
智慧城市_实景三维|物业楼三维扫描案例分享_泰来三维






 工商网监
工商网监
评论