 中国科学技术大学开发具有多种变形模式的多关节人形微机械
中国科学技术大学开发具有多种变形模式的多关节人形微机械
记者8月10日从中国科学技术大学获悉,该校微纳米工程实验室吴东教授团队提出了一种飞秒激光二合一写入多材料的加工策略,制造出了由温敏水凝胶和金属纳米颗粒组成的微机械关节,随后开发出具有多种变形模式的多关节人形微机械。研究成果日前发表于《自然·通讯》期刊。
近年来,飞秒激光双光子聚合技术作为一种具有纳米精度的真三维加工方式,已被广泛应用于制造各种功能微结构。这些微结构在微纳光学,微传感器和微机器系统等领域展现出广阔的应用前景。然而,如何利用飞秒激光实现复合多材料加工,并进一步构建具有多模态的微纳机械仍极具挑战。
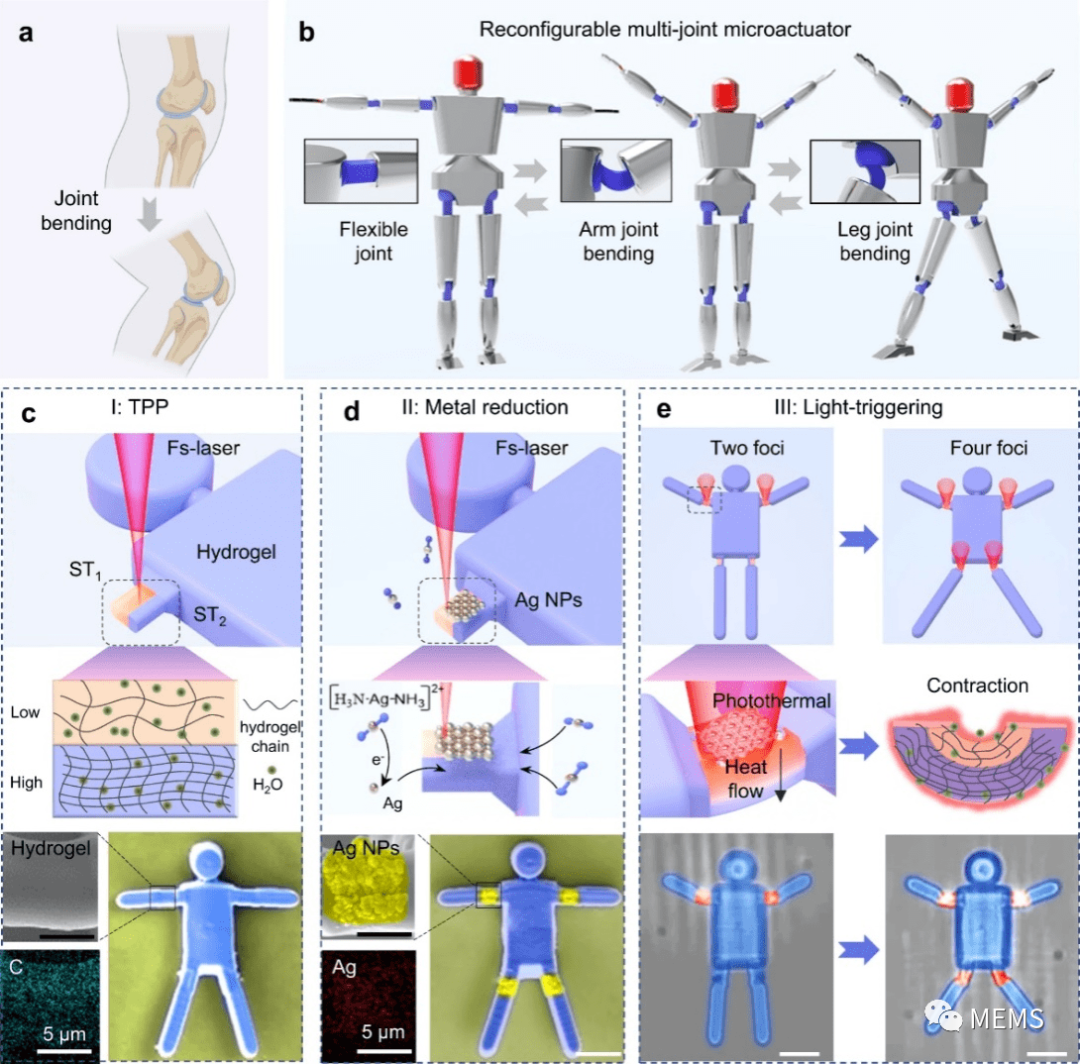
研究人员介绍,飞秒激光二合一加工策略包括使用不对称双光子聚合构建水凝胶关节以及在关节局部区域激光还原沉积银纳米颗粒。其中,非对称光聚合技术使水凝胶微关节局部区域的交联密度产生各向异性,最终使其可以实现方向和角度可控的弯曲变形。原位激光还原沉积可以在水凝胶关节上精确加工银纳米颗粒。这些银纳米颗粒具有很强的光热转换效应,使多关节微机械的模态切换表现出超短响应时间和超低驱动功率的优异特性。
作为一个典型的示例,八个微关节被集成在一个人形微机械上。随后,利用空间光调制技术在3D空间内实现多焦点光束,进而精确地刺激每一个微关节。多个关节之间的协同变形促使人形微机械手完成多个可重构的变形模态。最终,在微米尺度下实现了“舞动的微机器人”。作为概念验证,研究人员通过设计微关节的分布和变形方向,双关节微型机械臂可以对同向和异向的多个微颗粒进行收集。
研究人员表示,飞秒激光二合一加工策略可以在各种三维微结构局部区域构建可变形的微关节,实现多种可重构的变形模态。未来,具有多种变形模态的微机械手将在微型货物收集、微流体操作和细胞操纵方面展现广阔的应用前景。
责任编辑:彭菁
-
3D
+关注
关注
9文章
2895浏览量
107676 -
微机械
+关注
关注
0文章
20浏览量
11557 -
机械臂
+关注
关注
12文章
515浏览量
24640 -
微传感器
+关注
关注
0文章
17浏览量
7909
原文标题:利用飞秒激光复合材料造出“舞动微机器人”
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
OpenHarmony城市技术论坛第12期——合肥站圆满举办

敏芯股份荣获2023年度江苏省科学技术奖
中国科学技术大学团队突破非接触心脏活动感知技术
易华录荣获2023年度北京市科学技术奖
中国科大携手云知声斩获ACM MM 2024竞赛多项荣誉
锦浪科技荣获中国电力科学技术进步一等奖
格陆博科技获中国智能交通协会科学技术奖

【品质铸就信赖】中国科学技术大学采购南京大展的DZ-TGA101热重分析仪

直线电机生产厂家谈高校建成投用人形机器人研究院
开启原生创新引擎,中国科学技术大学 鲲鹏昇腾科教创新卓越中心正式成立

中国科学技术大学科研团队取得量子计算研究新进展
量子激光雷达!中国科学技术大学这项发明在日内瓦斩获双项大奖

隼眼科技荣获中国交通运输协会科学技术奖!
常见的多关节机器人有哪些?具有什么特点?






 工商网监
工商网监
评论