 机器视觉表面缺陷检测系统设计方案
机器视觉表面缺陷检测系统设计方案
1、线阵相机选型
线阵相机是机器视觉领域中一种特殊的图像采集设备。由于它的传感器只有一行感光元件,因此可以实现高扫描频率和高分辨率。面阵相机在采集运动物体照片时会产生模糊图像,而线阵相机却很好的避免了这种情况。线阵相机的典型应用领域是对金属、塑料、纸和纤维等连续的材料进行采集,被拍摄的物体通常以匀速运动。利用一台或多台相机对其逐行连续扫描,以实现整个表面均匀检测。另外由于传感器的高分辨率,线阵相机也非常适合测量场合,它可以准确测量到微米级。
本文根据技术要求及“相机横方向分辨率=横向视野范围大小/相机像素精度”,求得相机横向像素个数需大于 2700,即 4096 个像素。通过以下公式求得了行频参数,
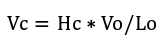
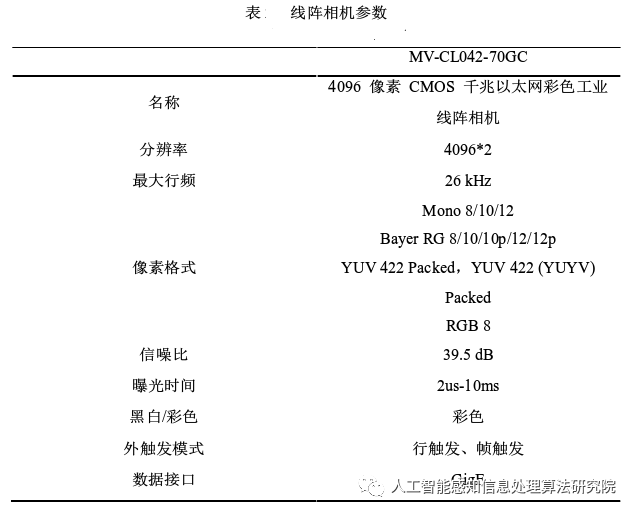
其中 Hc:线阵相机的每线像素数(单位:pixel),Lo:检测物体的宽幅(单 位:m),Vo:检测物体运动速度(单位:m/s),Vc:行频(单位:Hz,即 线/s)。求得本系统行频需大于 4096Hz。因此,本文选用了海康威视数字技术股份有限公司生产的 CMOS 高速彩色工业线阵相机 MV-CL042-70GC。
相机参数如下:
2、镜头选型
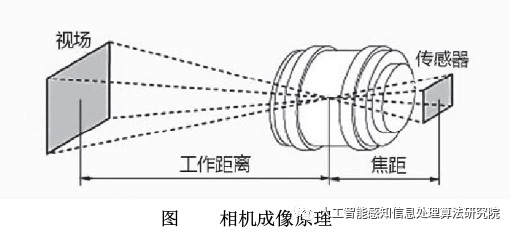
在机器视觉表面缺陷检测系统中,镜头与相机的组合对于中密度板表面缺陷图像的质量有着直接的影响,相机成像原理如上图所示。在采集图像时,镜头必须能够完整的照亮相机的传感器区域,以避免阴影和渐晕的产生。镜头的光学分辨率越好,可以再现出越精细的结构。对于工业镜头,一般可分为以下三类:标准分辨率镜头、微距镜头、远心镜头,不同类型的镜头应用场合也不相同。本文在确定了工作距离、视场大小和传感器尺寸之后,可以通过以下公式求得工业镜头的焦距 ⨍:
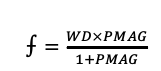
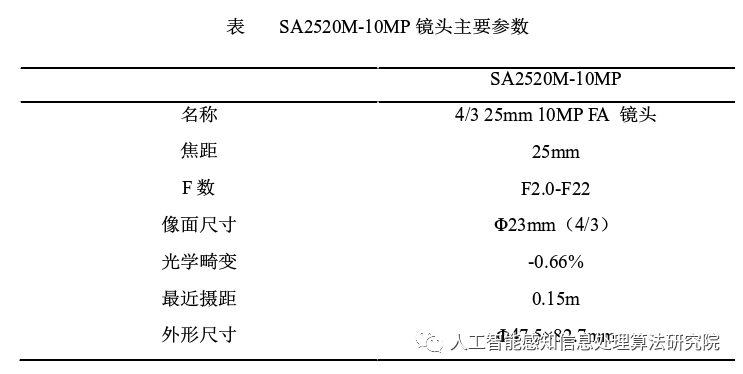
式中,WD 表示拍摄距离,指镜头与拍摄目标的距离;PMAG 表示镜头放大倍数,指相机传感器大小与视场大小之比。根据本研究中的实际需要,本文选用焦距为25mm 的工业镜头。
镜头的主要参数如下表所示:
3、光源选型
光照系统是中密度板表面缺陷检测系统中一个重要的环节之一,它决定着系统的检测结果与分割质量,失败的照明系统会导致缺陷细节信息的丢失。由于相机是通过采集检测目标的反射光来构成图像。因此,在进行光源的选型时,首先要考虑到所有影响光线反射的外界因素,如检测对象的材料、大小、形状及颜色等。其次是光源的颜色及亮度,对比度差和照明不均匀的图像会影响直接系统的识别准确率。对于某些缺陷,在使用特定颜色光进行照明时,也会提高系统的识别准确率。
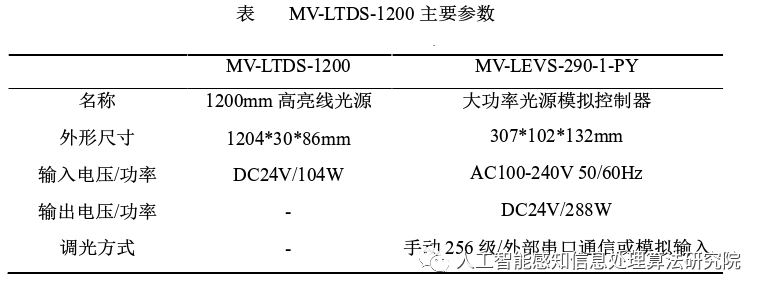
本研究选用海康威视公司生产的工业线形光源 MV-LTDS-1200 及其控制器,如上图所示。该光源功率为 104W,256 级亮度调节。MV-LTDS-1200 及其控制器主要参数如下表所示。
4、主机选型
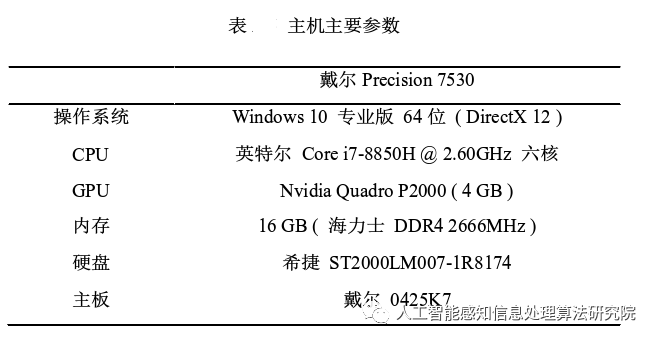
主机的主要作用是软件的载体,本文的软件系统包含神经网络算法,因此 GPU是主机的一个主要参数。若将 CPU(中央处理器)称为 PC 的大脑,则 GPU(图形处理单元)便是它的灵魂。与 CPU 相比,GPU 将复杂的任务分解为成千上万个单独的任务来并行处理,因此这使 GPU 成为图形计算的理想选择。从体系结构上讲,CPU仅由几个内核组成,这些内核具有大量可以同时处理几个软件线程的缓存。而 GPU由数百个可以同时处理数千个线程的核心组成。在 AI 中,GPU 已成为称为“深度学习”的技术的关键。深度学习神经网络含有大量数据,训练它们执行任何人类程序员都无法描述的复杂任务。实验主机参数如下表所示:
5、平台搭建
本研究搭建的图像采集平台如下图所示,平台由相机、光源、匀速传送台、光电开关、主机等模块组成。平台可采集不同速度下的板材图像,相机、光源的高度与距离可自由调整,为接下来的实验提供了方便。平台将供后续软件开发、深度学习算法数据采集、深度学习算法实验与评估使用。
6、尺寸标定
本文基于长宽为 0.35 米的标定板对图像采集平台的线阵相机像素点进行了尺寸标定工作,标定样图如下图所示。通过如下公式确定了相机的主要参数。
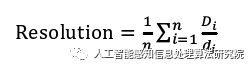
式中,Resolution表示相机横向分辨率;Di表示标定圆直径的实际尺寸;di 表示标定圆直径的像素尺寸;n 表示标定圆数量。最终确定了相机横向分辨率为0.25mm/pixel;横向视野范围为 1.02 米。
来源:新机器视觉
审核编辑:汤梓红
-
机器视觉
+关注
关注
162文章
4423浏览量
120952 -
缺陷检测
+关注
关注
2文章
145浏览量
12332 -
深度学习
+关注
关注
73文章
5523浏览量
121724 -
线阵相机
+关注
关注
0文章
21浏览量
994
原文标题:【光电智造】基于机器视觉深度学习缺陷检测系统- 图像采集平台搭建
文章出处:【微信号:今日光电,微信公众号:今日光电】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论