 PID算法在控制系统中的特性和指标
PID算法在控制系统中的特性和指标
PID算法广泛的被应用在很多的控制系统中,最终的目的都是希望通过pid控制器实现被控量能稳定在预期的目标值。
使用pid控制器作用于系统的时候,正常情况下它应该是不断的发生作用的,从而让系统能够克服外部带来的干扰最终稳定在期望值。所以对于在一个系统中使用pid进行调节控制的时候,我们是很有必要了解一些有关控制系统的概念和指标的。同时既然选择了使用pid作用系统的控制器,那么有关pid的特性和指标也是有必要掌握的。
(1)系统的状态:动态和静态
一个控制系统的状态可以分为两种:静态和动态。
静态:如果一个系统通过调节之后,各个环节都暂时不动作了,系统的输入保持不变,输出也处于相对静止的状态了,那么这种状态称为静态。
打个比方:有一个液位控制系统,当他的进水量和出水量相等时,水位保持不变,这个时候就可以说这个液位系统达到了平衡,处于静态了。但是呢,静态不代表着系统里面的水就静止了,水还是一样在流动的,只不过从我们液位稳定的角度而言,它已经是达到稳定了。
动态:如果一个系统原本是处于静态,但是由于系统的输入发生了变化,系统的平衡状态被破坏,系统的调节器会发挥作用,调节系统的输出跟着发生变化,这种由于输入发生变化,从而调动系统各个环节跟着变化的过程,就称为系统的动态。
(2)系统的过渡过程
如果一个系统已经达到了平衡状态了,如果这个时候输入发生了改变,那么系统会从一个平衡状态变化到另外一个平衡状态,这个变化的过程就称为系统变化的过渡过程。
系统的过渡过程有几个过程,如下:
1》衰减过程
衰减过程是系统为了应对条件的变化由一开始的波动到最后稳定在某一个数值上,最终达到平衡状态。这是系统控制中所希望的。
衰减的过程有两种:
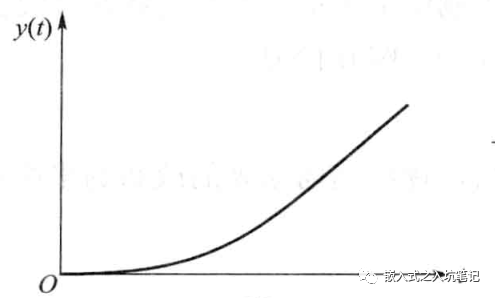
1)非周期衰减:这种衰减变化的过程一般是被控量在设定值的某一侧变化,没有发生来回波动,最后稳定在某一数值。如下图:
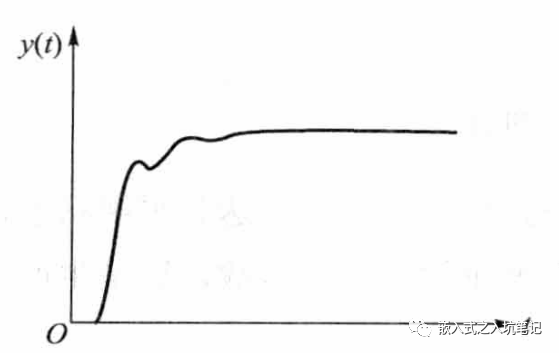
这种变化过程一般都变化缓慢,被控量达到设定值的时间比较长,对于希望快速达到控制目的的控制系统而言,一般不会采用。
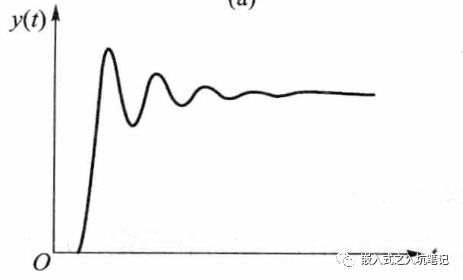
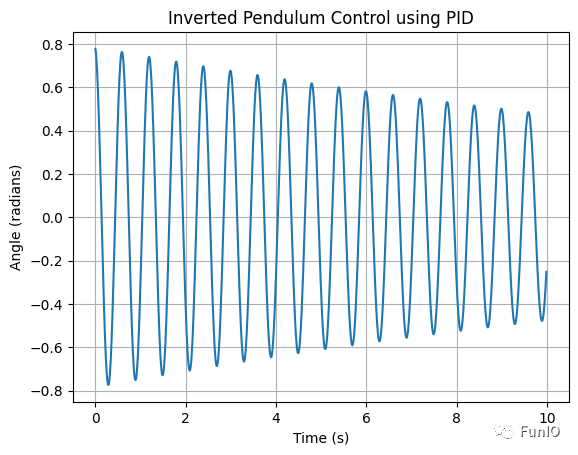
2)振荡衰减:这种衰减过程是被控量在设定值的附近来回波动,变化的幅度逐渐变小,最后稳定在某一个数值上。如下图所示:
2》振荡过程
发生振荡的系统,它的输出在设定值的附近来回波动,并且波动的幅度是一样的、保持不变的。如下:
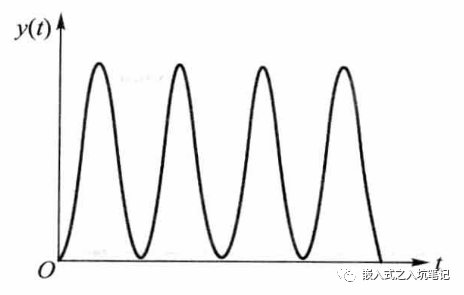
这种振荡的过程系统是处于稳定与不稳定之间的,一般都认为是不稳定的,不会采用这种控制方式。
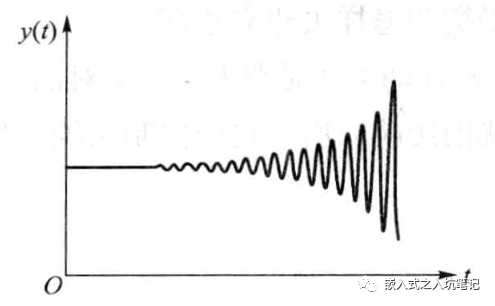
3》发散过程
发散过程是被控量的波动越来越大,最后会越来越偏离设定值。如下:
(3)系统过渡变化过程的质量衡量指标
1》系统的余差
系统的余差指的是当系统经过调节之后,被控量达到的新稳态值与设定值的偏差。偏差越小系统达到稳定时距离设定值的偏差越小,对于控制要求严格的系统,余差自然是越小越好。
当然,也不是所有的系统都要求余差非常的小,有些系统的控制要求没那么高,只要余差在一定的范围都是可以接受的,这样就可以区分出有差系统和无差系统。
有差系统:就是达到稳态之后,被控量与设定值之间存在一定的偏差。
无差系统:就是达到稳态之后,被控量与设定值之间没有偏差的存在。
2》系统的衰减比
对于一个系统而言,如果变化的过程中一开始是在目标值附近振荡,然后振荡的幅度逐渐减小,最后稳定在目标值,那这是理想的过渡过程。如下:
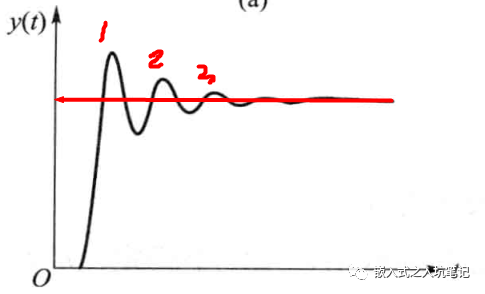
衰减比是指两个相邻的同向波峰之比。一般来说,衰减振荡的过程中,一开始波峰较高,然后不断的变小,快速达到稳定状态,这是我们希望看到的。
所以衰减比一般用两个相邻的同向波峰的大小进行比较来表示,比值为n。如上图中的1:2、2:3。
前后的波峰大小的比值n越小,相邻两个波峰越接近,过渡过程越接近于等幅振荡,系统不稳定;n越大,相邻两个波峰越远离,过渡过程越接近于单调过程,过渡时间太长。
一般结论中认为的衰减比比较合适的比例是4:1 ~ 10:1。
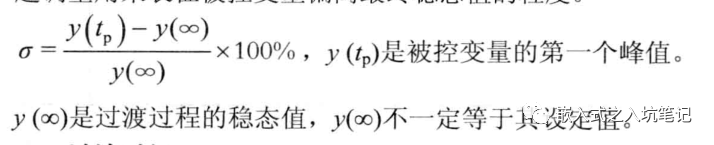
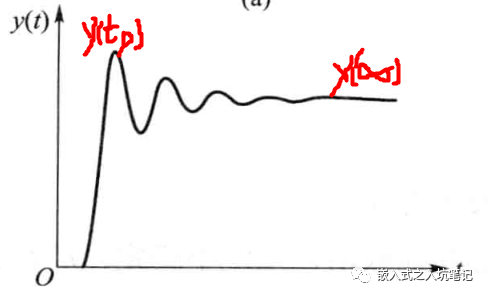
3》超调量
超调量用来表示系统的被控量偏离最终稳态值的程度。计算方法如下:
如下所示:
4》过渡时间 ts
过渡时间ts指的是当一个系统被扰动干扰开始进入到新的稳态之后的±5%或者±2%范围的这段时间。
过渡时间越短,表示过渡过程进行的越迅速,对抗干扰的能力越强,系统的控制质量很高。相反,如果一个系统的过渡时间很长,可能会出现因为一个干扰引起的过渡过程还没结束,另外的干扰又进来,导致整个系统叠加多个干扰,导致系统的控制效果变差。
以上简单的分享了一个控制系统的几个指标和概念,都是个人学习领悟的,如果有错误的地方,还望分享指正,谢谢!
-
控制器
+关注
关注
113文章
16568浏览量
180398 -
控制系统
+关注
关注
41文章
6695浏览量
111174 -
PID算法
+关注
关注
2文章
172浏览量
24500 -
PID
+关注
关注
36文章
1475浏览量
86215
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论