 RGBD相机的标定和图像配准
RGBD相机的标定和图像配准
1
kinect2相机简介
1、三种主要相机类型

2、常见的RGB-D相机

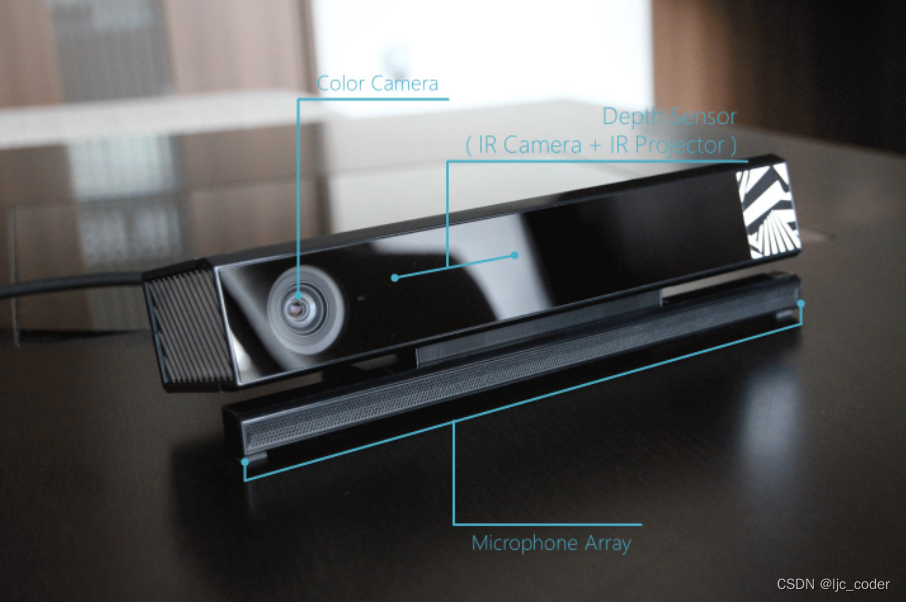
3、kinect2 相机
从左到右依次是:彩色摄像头;红外摄像头(深度摄像头),但这个要和再右边的IR Project(红外投射器)一起工作的;底下的长条是麦克风,可以感受到说话人的方向
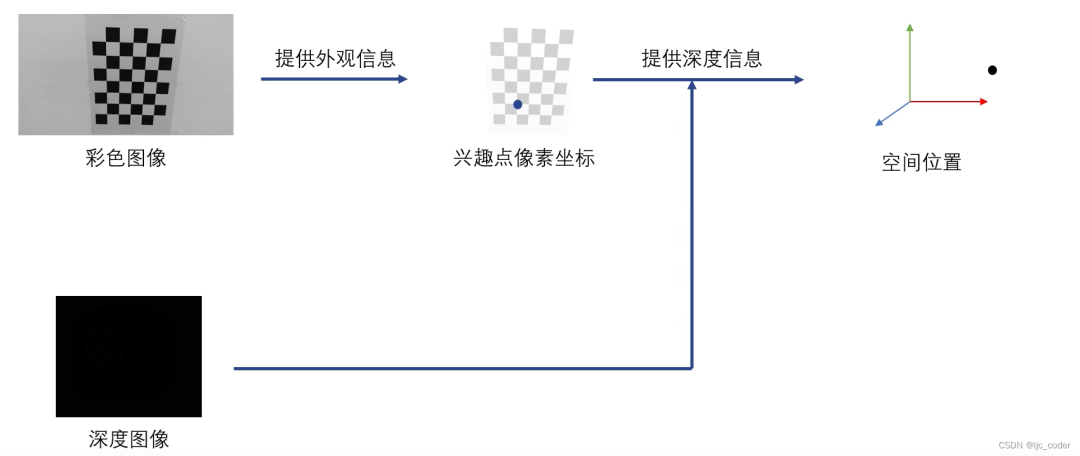
3.1使用RGB-D相机的好处
可以直接通过拍摄的深度图得到物体的空间位置
3.2问题
keinect相机 彩色图像是1920x1080的,但深度图是512x414的,因此需要深度校准
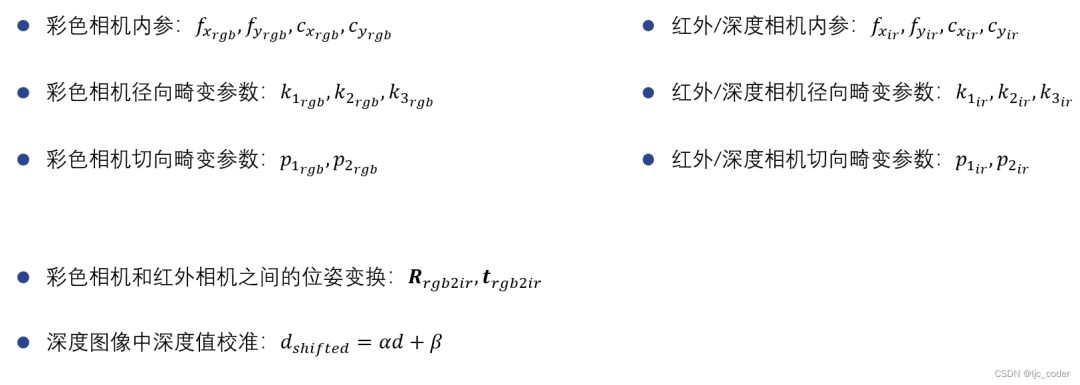
3.3实际标定得到的数据
2
内外参标定
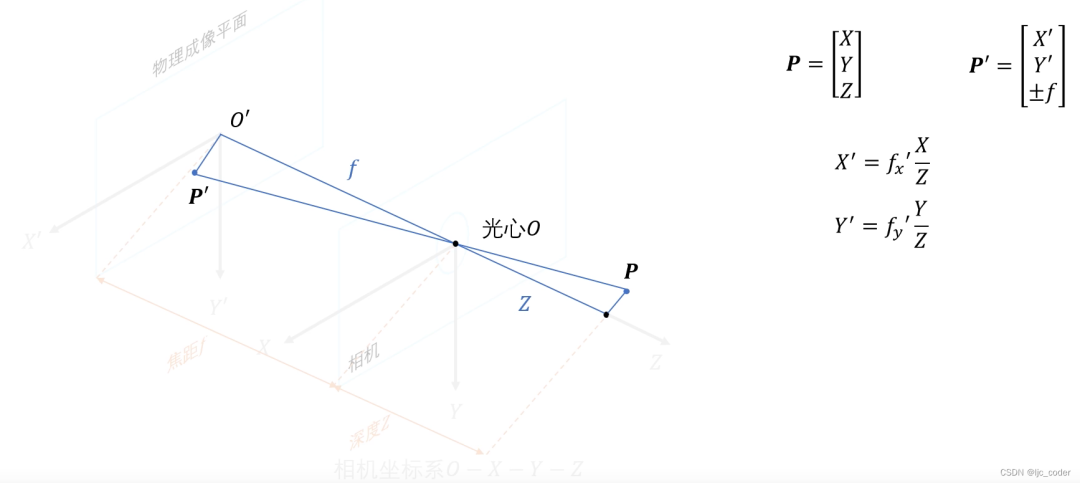
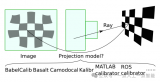
1、针孔相机投影模型
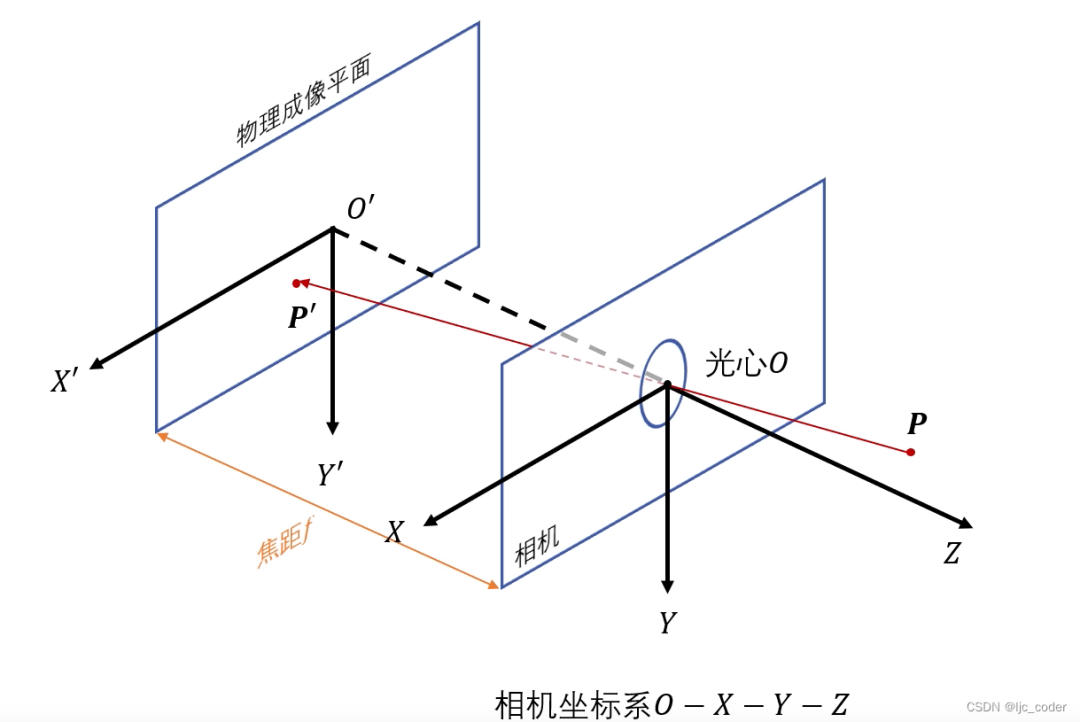
相机坐标系 -> 物理成像平面
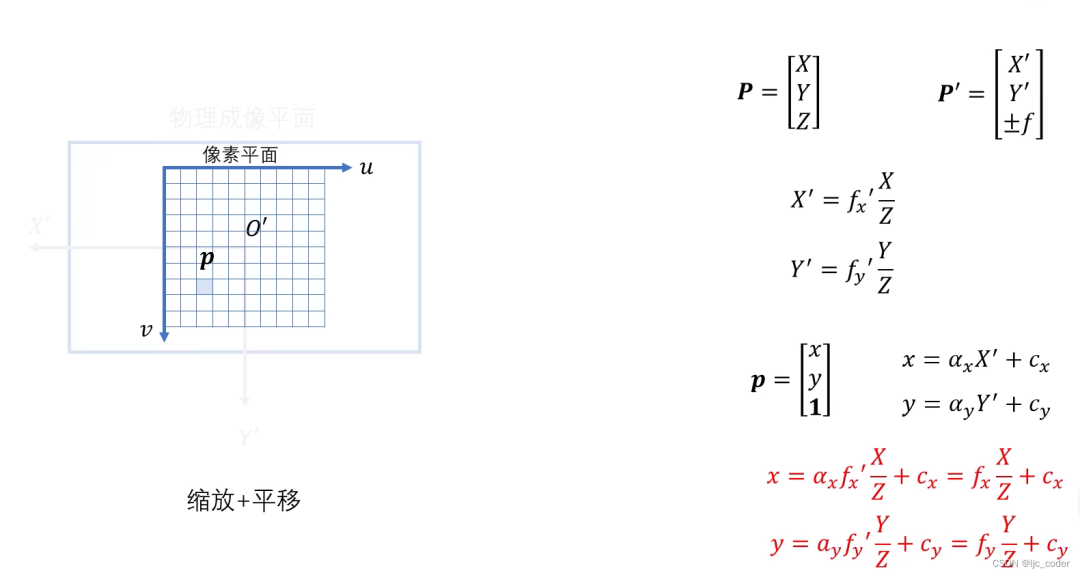
物理成像平面 -> 像素平面
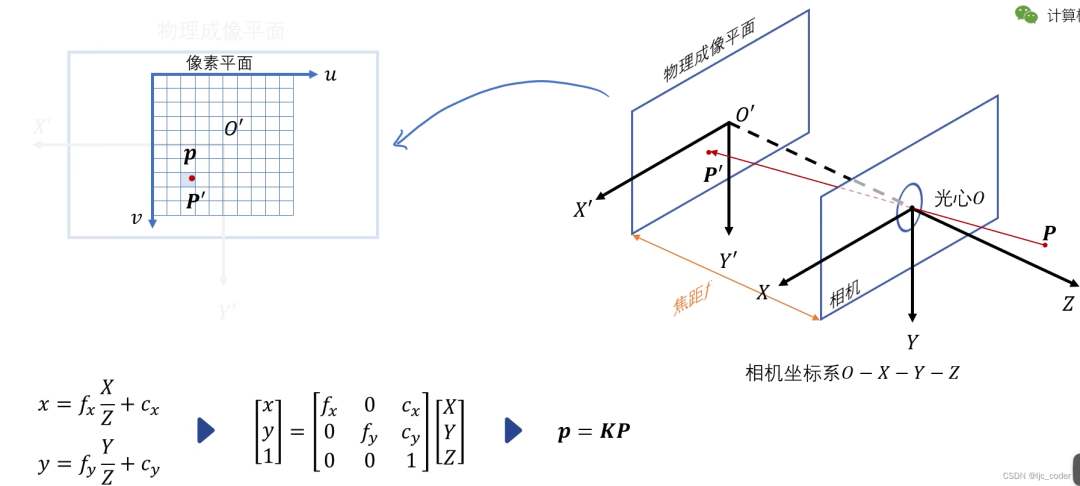
总结一下
整个投影过程都可以通过下面的内参矩阵描述 fx,fy,cx,cy
主要通过k1,k2,k3三个参数来描述相机的径向畸变(常用k1,k2就够了)
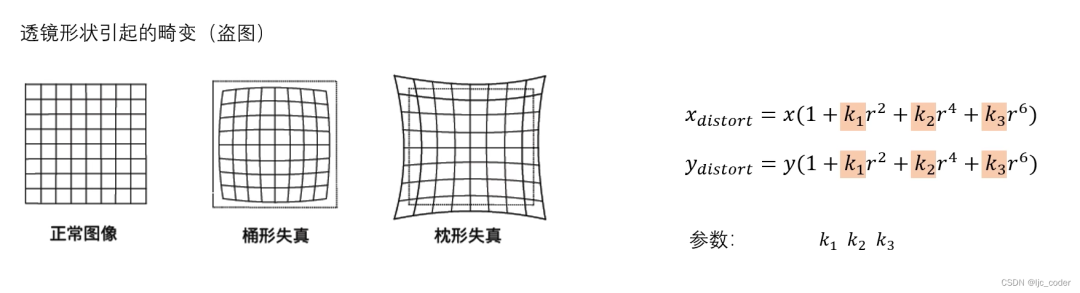
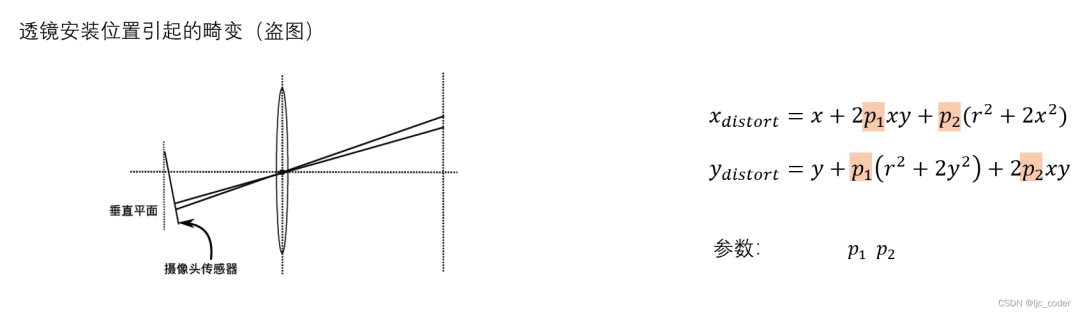
对于切向畸变,一般使用p1,p2来描述
2、工具
对于 kinect 可以用 iai_kinect2 工具包做标定
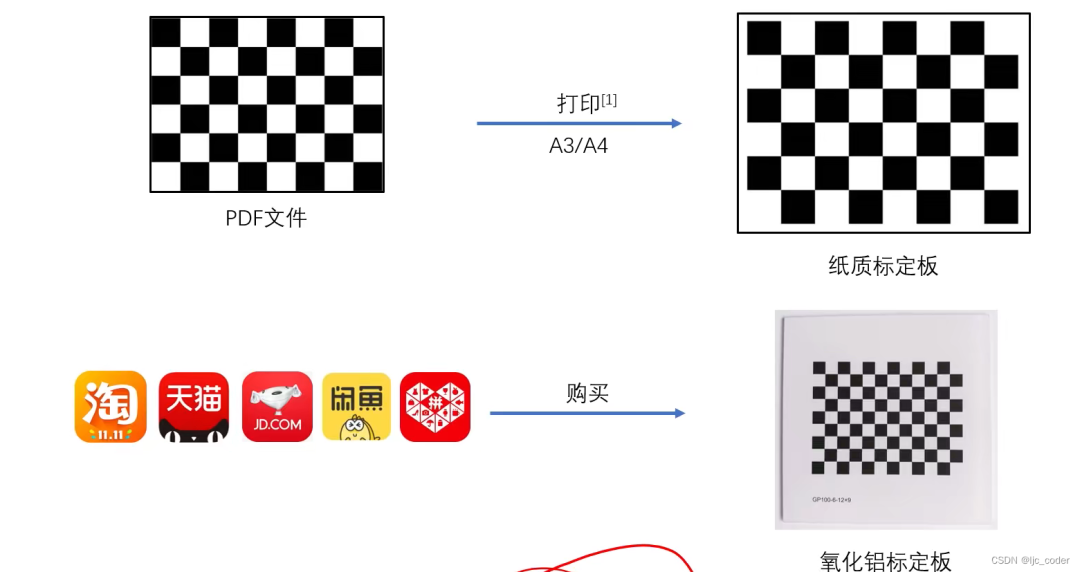
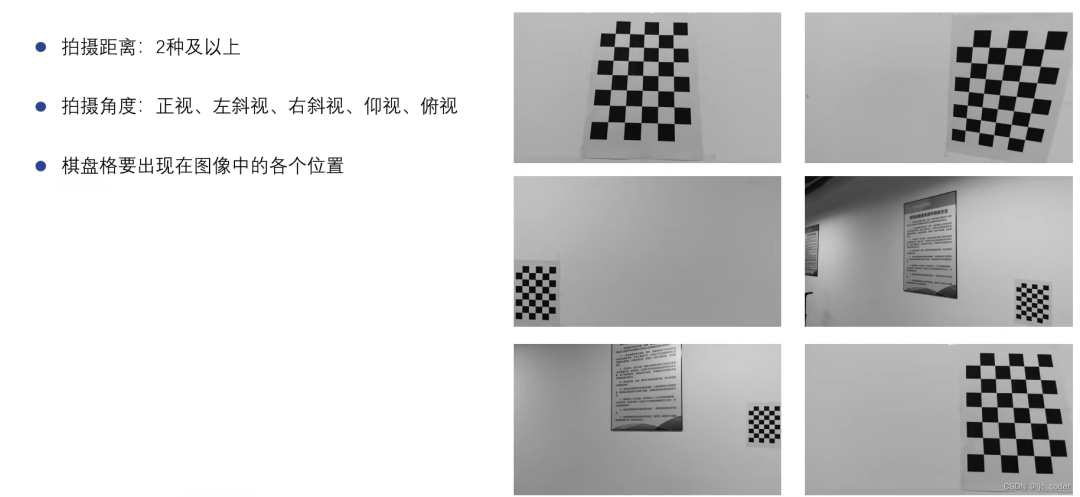
3、棋盘标定板
4、彩色相机标定
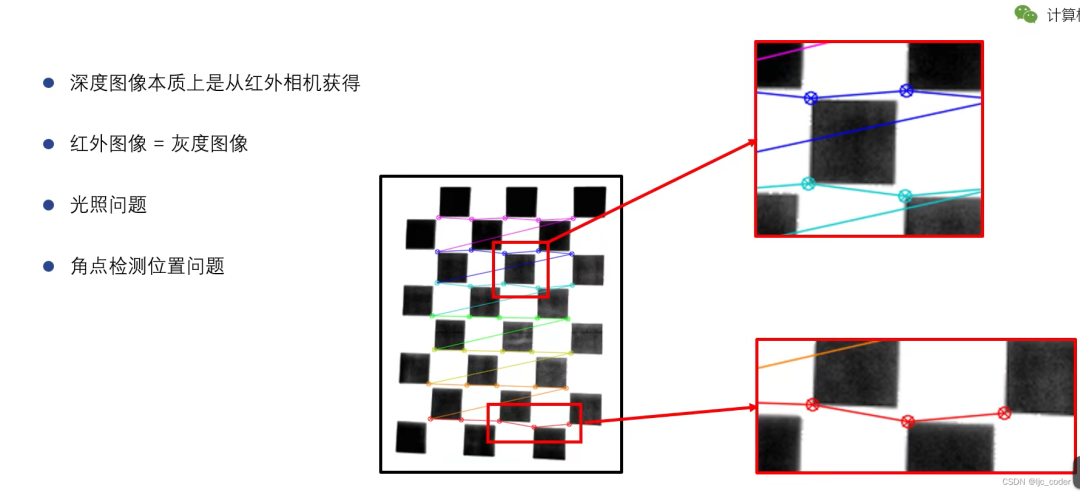
5、红外相机标定
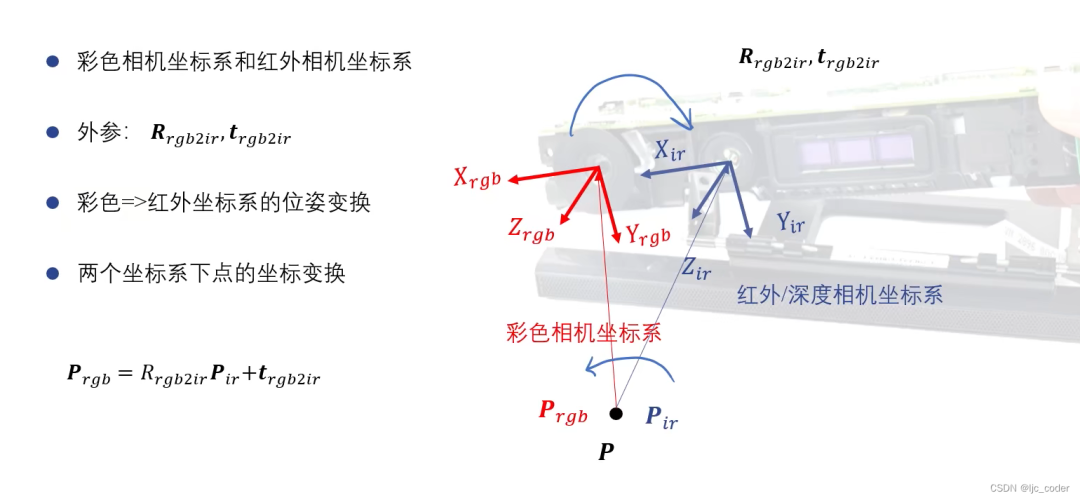
6、彩色相机和红外相机的外参标定
描述深度坐标系下的点如何表示在RGB图中
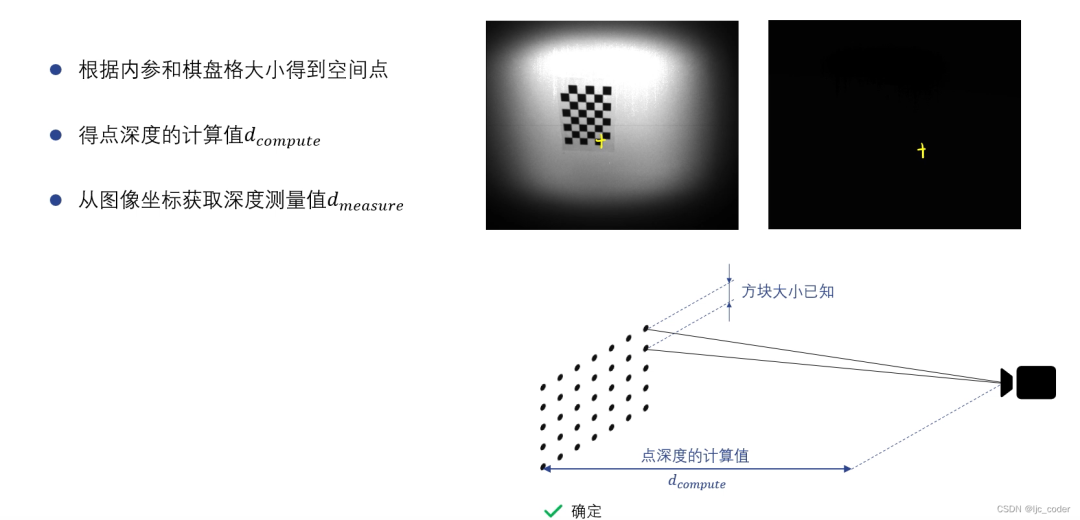
7、深度相机的深度校准
3
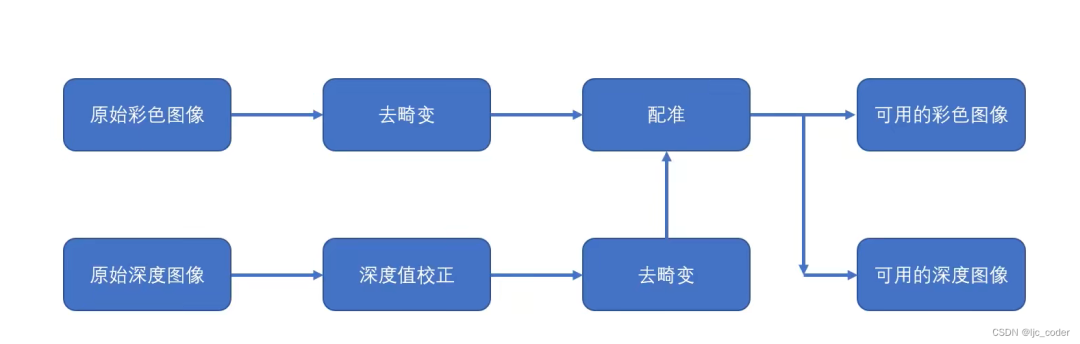
图像配准
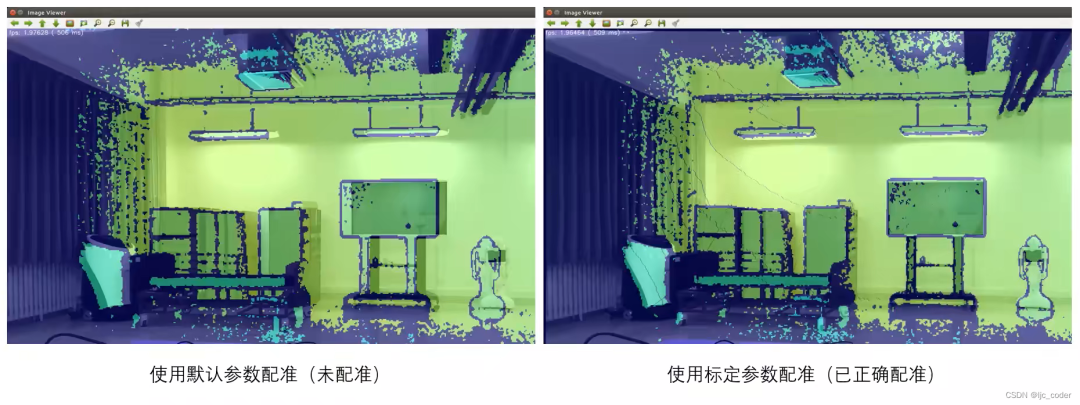
1、配准原理
(配准后的深度图不对)
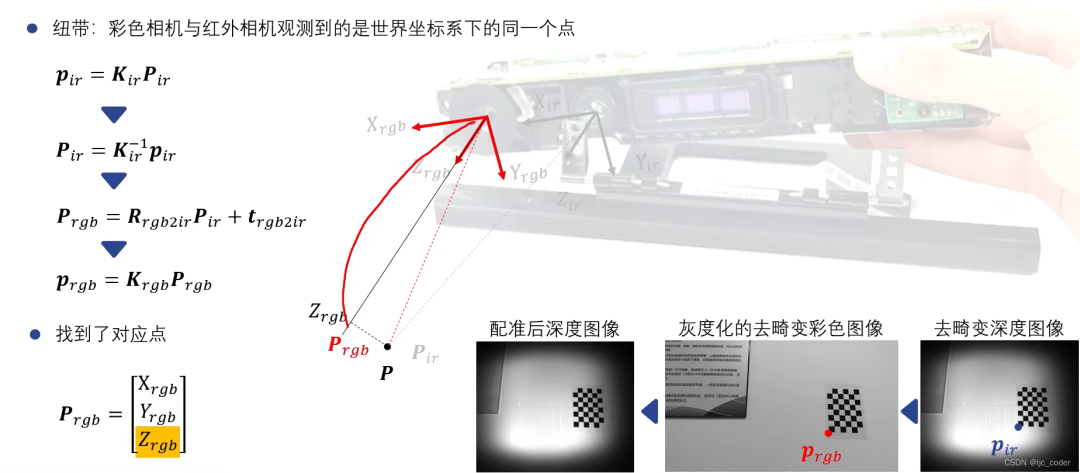
正确
4
总结
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
图像
+关注
关注
2文章
1091浏览量
40682 -
相机
+关注
关注
4文章
1385浏览量
54151
原文标题:RGBD相机的标定和图像配准
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
采用LifeCam运行TIDA-00361_LCr3000程序进行到投影仪标定步骤,如何使LifeCam Cinema相机捕捉到投影仪投射的棋盘格图像?
),LifeCam Cinema相机采集不到棋盘格图像,从而无法实现投影仪标定。请问,如何才能使LifeCam Cinema相机捕捉到投影仪投射的棋盘格
发表于 03-03 07:20
请问DLP4500套件进行投影标定时棋盘格的长宽比是多少?
如题,我手里的DLP4500套件,运行3D_Scanner_LCr4500_PGcam.exe程序,进行标定时,会投影出一副棋盘格图像,我们发现这幅图像的格子不是正方形。
我们的标定
发表于 02-28 07:04
DLP_LightCrafter_4500_3D_Scan_Application软件进行相机和投影仪标定时,进入相机拍照界面后程序未响应然后退出怎么解决?
DLP_LightCrafter_4500_3D_Scan_Application 软件进行相机和投影仪标定时,进入相机拍照界面后,程序未响应然后退出,参考手册DLPU019B没有相关处理,请问有解决办法吗?
发表于 02-26 06:14
TIDA-00254使用SDK进行物体点云重建时在系统标定时DLP不打光,怎么解决?
投影:DLP4500
相机:PointGray相机,具体型号:FL3-U3-13Y3M USB 3.0
SDK可以连接到相机与投影,且已完成相机标
发表于 02-20 08:23
肇观电子首发自标定3D深度相机
肇观电子近日宣布,凭借自研VPU芯片的异构计算架构与实时动态优化算法,成功实现了深度相机的全生命周期自标定技术,为全球首创。
基于FPGA的GigE Vision相机图像采集方案设计
1 概述 GigE Vision是一个比较复杂的协议,要在FPGA中完全实现具有较大的难度。如果FPGA作为接收端希望实现GigE Vision相机的配置和图像采集功能,则只需要实现其中小部分功能


工业相机测长仪的组成部分
的视野范围内时,通过追踪型材两端在图像中所处的位置即可测得型材的长度。
在图像处理方式的测量中,由于相机视野内中间和边缘的物像比例存在差异,仅仅依靠像素比例无法达到精确测量。系统内外参数标定
发表于 08-27 17:45
工业相机该选择哪种图像采集卡?
在选择与工业相机匹配的图像采集卡时,需要考虑多个因素,包括相机的分辨率、接口类型、传输速度以及采集卡的兼容性、稳定性、性能等,具体选择需要根据实际的应用场景和需求来确定。1.了解工业相机

技术指南丨深视智能3D相机上下对射测厚操作流程
变动了,如果改变了相机安装位置,那么需要重新做一次3D标定。把扫描好的标定块高度图链接到图像预处理模块中,在高级设置里面


相机标定技术的性能分析与工具比较
相机在从遥感、测绘、机器人技术到内窥镜等一系列应用中都是不可或缺的。这些应用通常需要了解相机中真实世界点和它们在图像中的几何关系。
发表于 04-30 09:28
•1237次阅读
康谋技术 |深入探讨:自动驾驶中的相机标定技术
随着自动驾驶技术的快速发展,多传感器的数据采集和融合可以显著提高系统的冗余度和容错性,进而保证决策的快速性和正确性。在项目开发迭代过程中,传感器标定扮演着至关重要的角色,它位于数据采集平台与感知融合

基于TOF深度相机的图像处理专利获授权
该专利主要涉及图像处理技术领域,特别是针对基于TOF深度相机的图像处理方法和存储媒介进行了深入研究。其核心内容包括:首先,采集每个像素的初始实部数据与初始虚部数据;其次,通过将这些数据与当前数据相结合,生成特征数据;






 工商网监
工商网监
评论