 镭神智能首次攻破国产激光雷达矿区无人驾驶应用难题——让灰尘“隐形”,不再遮“眼”
镭神智能首次攻破国产激光雷达矿区无人驾驶应用难题——让灰尘“隐形”,不再遮“眼”
由于矿区环境相对封闭,行驶路线固定且行驶速度慢,但工况复杂、环境恶劣,因此,矿区运输矿卡无人化在矿山场景得到快速推广、规模化落地应用。
据了解,2020-2025年是我国矿区自动驾驶的重点建设期,市场体量高达千亿级。
激光雷达作为无人矿卡的“眼睛”,具有高精度、远距离、高稳定性的优点,为无人矿卡在恶劣工况下提供高稳定感知,精准探测,保障复杂工况车辆行驶安全。
然而,在矿区环境作业时,灰尘、粉尘四起,不仅逐渐布满激光雷达表面会在前方形成一片尘雾,仿佛一道帘子遮住了无人矿卡的“眼睛”,影响激光雷达的探测质量,甚至导致无人驾驶车辆误判。因此在无人矿卡车辆工况实际环境运营中,灰尘对雷达感知硬性影响是行业面临的难题。
镭神智能工程师长期深入无人矿卡运营现场,经过多年探索,将扬尘特性与点云算法进行了大量的对比实验计算,形成了一套适用于矿卡运营工况的激光雷达灰尘过滤的算法。此套算法可结合镭神智能任意一款激光雷达搭载在无人车辆上,解决如矿区等多粉尘环境下无人驾驶的感知精度问题,提升无人驾驶运行效率和安全性,首次攻破国产激光雷达矿区无人驾驶应用难题。
- 灰尘算法优化前
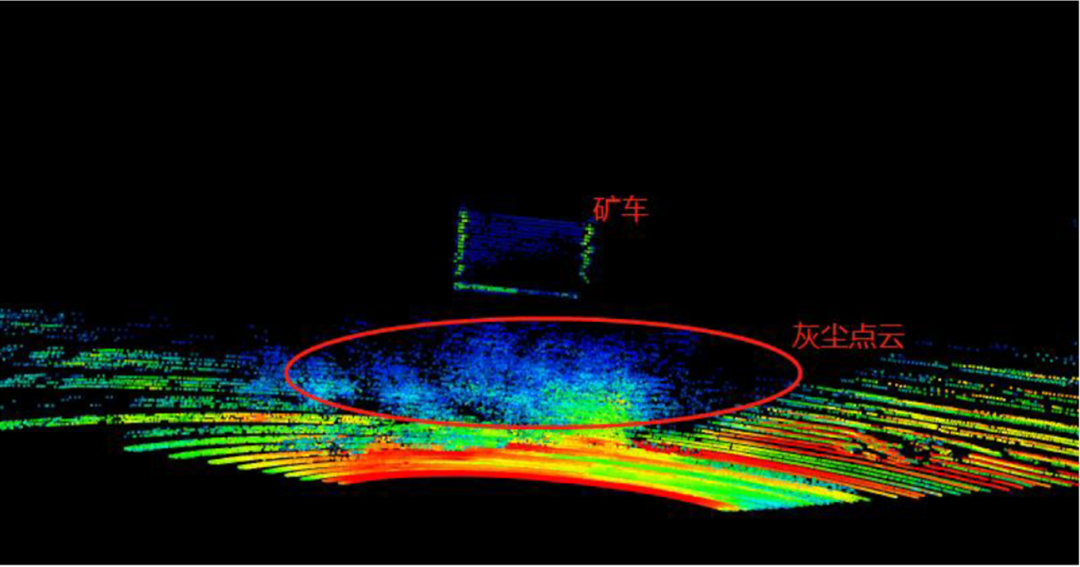 检测到灰尘
检测到灰尘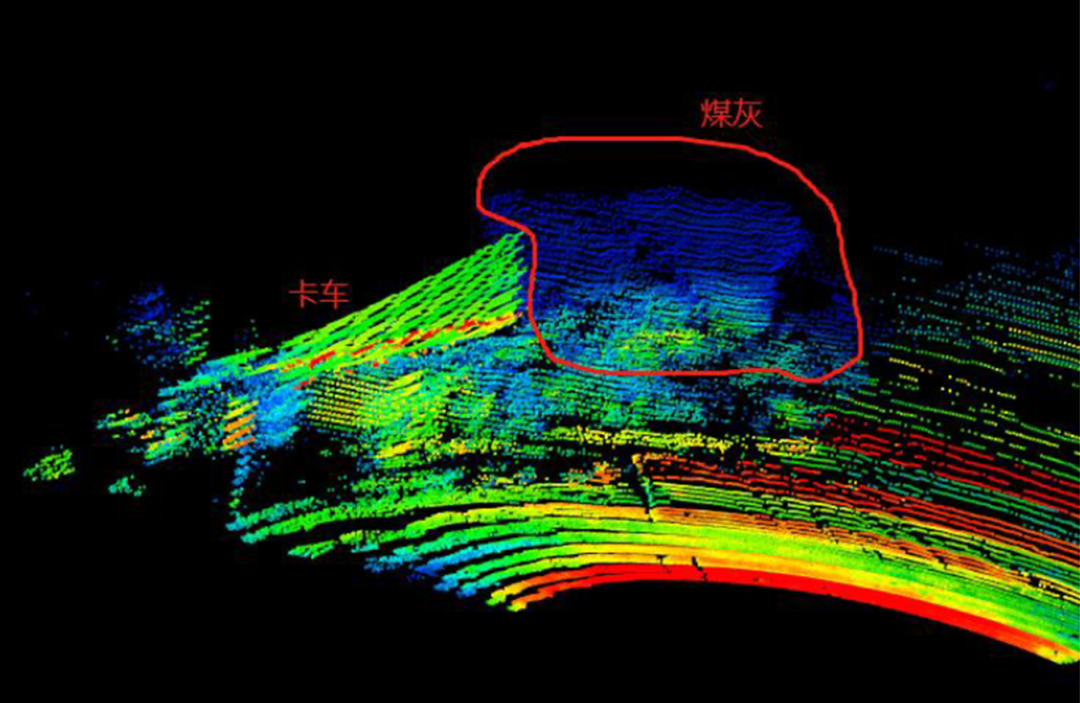 检测到煤灰
检测到煤灰- 灰尘算法优化后
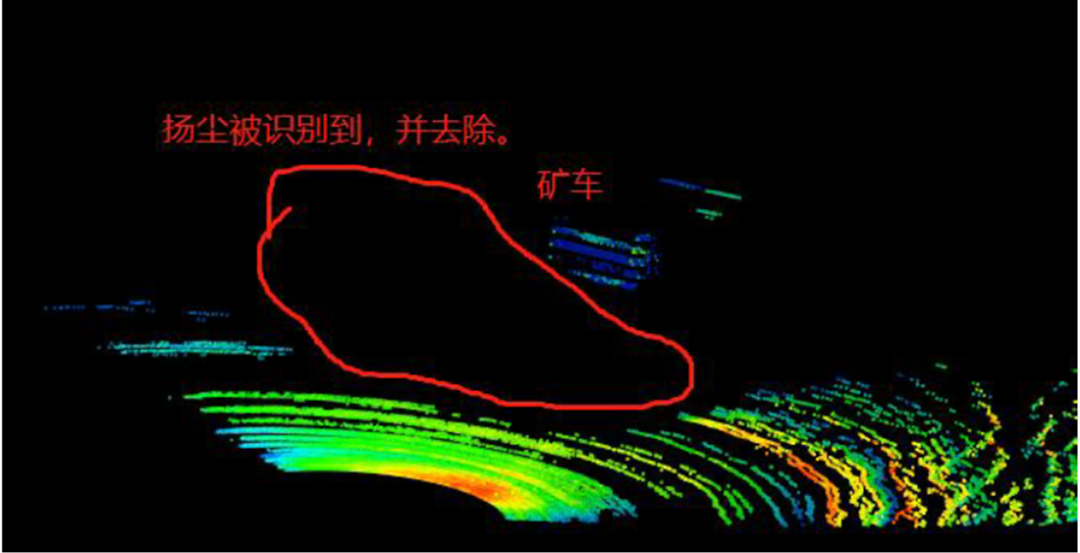 灰尘被优化去除
灰尘被优化去除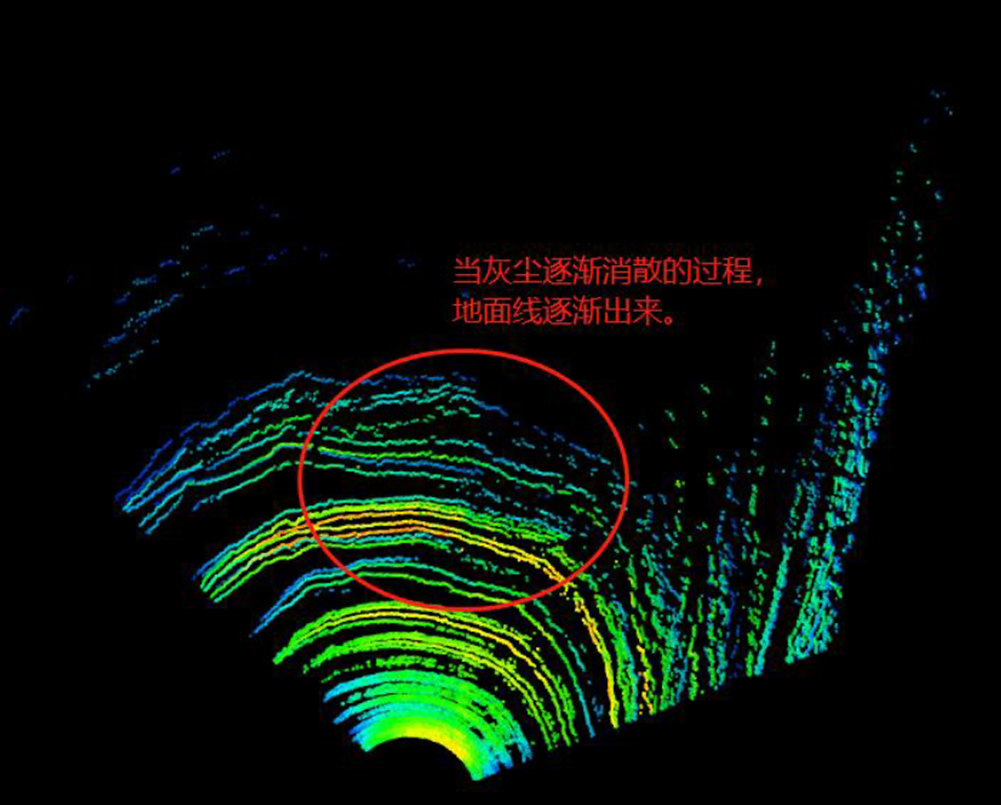 灰尘消散后,地面检出
灰尘消散后,地面检出可以从点云图中看出,镭神智能激光雷达可以识别并去除大片的灰尘,减轻上位机滤除的负担;当中远处物体没有被煤灰遮挡时,仍然可以检测到中远处物体。
目前,搭载镭神智能混合固态激光雷达系列产品的无人矿卡在多个大型矿区稳定运行,为矿区运营安全降本增效。

镭神智能始终坚持深入挖掘各行业痛点,研发推出基于激光雷达的全场景行业应用解决方案,为各行业客户提供安全、高效、高价值的感知精品。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
激光雷达
+关注
关注
967文章
3937浏览量
189563 -
无人驾驶
+关注
关注
98文章
4028浏览量
120258
发布评论请先 登录
相关推荐
镭神智能激光雷达全场景系统解决方案赋能低空经济新时代
的浪潮中,激光雷达(LiDAR)以其高精度、高分辨率、三维成像等显著优势,成为推动低空经济发展的关键技术之一。镭神智能凭借在激光雷达技术上的深厚积累,为低空经济提

展会预告|镭神智能与您相约第十五届珠海航展
作为全球领先的全球领先的全场景激光雷达与智能搬运机器人系统解决方案提供商全技术路线、全领域应用、全国产化的高性能激光雷达及行业应用方案,致力于打造全
激光雷达的维护与故障排查技巧
激光雷达(LiDAR,Light Detection and Ranging)是一种利用激光进行距离测量和目标识别的技术。它广泛应用于无人驾驶汽车、地理信息系统(GIS)、环境监测、航空航天等领域
镭神智能激光雷达低空无人机目标追踪光电系统:筑牢机场低空安防屏障
近日,天津滨海机场遭遇无人机干扰,导致航班大面积无法起降,引发广泛关注。这一事件再次凸显了低空安防领域的重要性,以及高效、精准的监控系统对于保障航空安全的必要性。镭神智能推出的激光雷达
镭神智能荣获国家知识产权优势企业称号,技术创新引领行业未来
镭神智能凭借其卓越的技术创新能力和知识产权管理水平,荣获国家知识产权局颁发的“国家知识产权优势企业”称号。这一殊荣不仅是对镭神智能在智能
镭神智能牵头起草的业内首个激光雷达3D SLAM无人叉车团体标准正式发布
近日,深圳市镭神智能系统有限公司(以下简称“镭神智能”)牵头起草的《激光雷达3DSLAM无人叉车
镭神智能领航未来航空安全:直升机防撞激光雷达荣获行业大奖
直升机防撞激光雷达,并在2023年度中国雷达行业协会科技奖评选中荣获科技进步二等奖,再次证明了其在航空安全领域的领先地位。镭神智能M06直升机防撞激
山东镭神智能盛大开业,引领3D SLAM无人叉车新纪元
5月9日,山东镭神智能有限公司盛大开业,并举行了3DSLAM无人叉车招商大会。这标志着镭神智能在激光雷达
关于镭神智能M10系列激光雷达抗环境光强度参数的严正声明
严重影响我司M10系列产品的销售,损害了我司与代理合作伙伴的利益,特此作出严正声明!镭神智能M10系列激光雷达采用TOF(TimeofFlight)方案,该系列激
镭神智能3D SLAM无人叉车系列在华为云商城正式上线
日前,镭神智能已完成华为云多重资质审核,激光雷达3DSLAM无人叉车系列产品正式入驻华为云商城,为客户提供更加高质、便捷的服务,满足快速上云和开展业务的诉求。
2023镭神智能大事记
关键词:融资2023年镭神智能完成数亿元D轮融资,由济南同信未来产投与重庆南部基金共同领投,在激光雷达技术先进性、行业应用创新性与实用性以及行业地位领先性等方面得到
海南大学副校长邹勇华一行莅临镭神智能参观交流
率公司同事热情接待,详细介绍了镭神智能作为国内激光雷达领军企业,荣获国家科技进步二等奖,构建了七大激光雷达产品平台+三大算法+两大控制器+N个全场景解决方案的业务

镭神智能首款机械式激光雷达PoE系列震撼上市
市面上传统激光雷达内部结构相当精密,零件数量多,装配工艺复杂,布线繁琐,且多数情况下,激光雷达安装场景多样化,室内天花板或室外高处角落,给供电管理带来极大的不便,后期的维护成本非常高。镭神智能
激光雷达穿透雾霾,赋能智驾安全出行
导致追尾事故。雾霾场景也是激光雷达应用的最大难点之一。裸眼视图——大雾环境为解决这个问题,镭神智能自主研发一套激光雷达





 工商网监
工商网监
评论