 移动机器人的发展现状及趋势 HMS产品在移动机器人的应用
移动机器人的发展现状及趋势 HMS产品在移动机器人的应用
如今,无论是在工厂的仓库,酒店的走廊,或是家中的客厅,我们都能看到移动机器人(AGV/AMR)的身影。它们因更便宜、更安全且比真实工人更高效而受大受欢迎。
这些机器人增加了企业的灵活性,允许在一个动态设施中整合执行不同任务的机器人。企业可以根据需求增加或减少移动机器人数量,并借助它们所收集大量实时数据,开启工业物联网之旅。
然而,由于环境的复杂多变,移动机器人制造商可能在以下通信方面遇到挑战:
连接移动机器人到主流工业网络
创建可靠的安全系统
确保可靠的 CAN 通信
根据现场需求建立不同的无线连接
远程访问移动机器人
HMS 的产品都采用模块化设计,能够在不改变硬件设计的情况下,灵活地帮助用户更改网络协议以满足现场需求。
了解 HMS 产品在移动机器人的应用
1. 连接移动机器人到主流工业网络
移动机器人需要与相关场所的控制器通信,它们之间往往使用不同的工业协议。例如,移动机器人可能使用 CANopen,控制器可能使用 PROFINET。移动机器人制造商可能希望在不同场所使用相同的移动机器人机型,但场所内的控制器使用另一工业网络,如 EtherCAT。
如何让移动机器人在不修改硬件的前提下,快速支持复杂的现场总线和工业以太网呢?
使用Anybus CompactCom 嵌入式或者Anybus Communicator 网关就可以做到。
嵌入式板卡及模块
用户只需将现有模块替换成针对另一协议设计的模块,就可以轻松地更换所支持的网络。
Anybus CompactCom 嵌入式产品介绍
嵌入式 OR 网关?
总体而言,我们推荐您根据产品数量和所需要的网络功能去挑选适合自己的产品:
对于产品数量较大的用户来说,嵌入式产品可能是最佳选择。Anybus CompactCom 嵌入式产品有模块、板卡和芯片三种形态,模块最适于快速上市,板卡则是高出货量的经济解决方案,而芯片是自行设计硬件的最佳选择。
而对于产品数量较小的用户来说,Anybus 网关产品是更经济的选择。
2. 创建可靠的安全系统
创建一个让移动机器人可以安全运输物资的系统是一项关键且富有挑战性的任务。此外,为了顺利出口,移动机器人还需符合不同地区和国家的安全标准。
使用 HMS 经过安全认证的产品,用户能够在满足机械指令要求的同时,降低开发风险和成本,缩短认证过程和上市时间。
HMS 的Ixxat Safe是业内最全面的产品之一,集成了基于 EN ISO 13849 和 EN/IEC 62061 的安全 IO 和通信解决方案。
Ixxat Safe 产品获得TÜV Rhineland 预认证,达到PLe(类别 4)和 SIL3规定的性能要求,并附带全套的实施和认证指南。因此,相较于自行开发,使用 Ixxat Safe 产品和借助 HMS 安全团队的支持可以简化最终产品认证,显著缩短上市时间。
3. 确保可靠的 CAN 通信
移动机器人通常依赖 CAN 总线,确保机器人的可靠控制和高性能。不过,许多基于 CAN 的应用可能会遇到网络饱和、错误传播等网络问题。
HMS 可以提供专业知识和现成产品,以建立与 CAN 网络的可靠连接,并保护电子设备免受 EMI 的影响。
访问 CAN 网络
Ixxat PC 接口卡能够确保与 CAN 或 CANopen 通信标准的可靠连接,使移动机器人制造商能够访问 CAN 网络并监测其设备(如电池)的性能。
Ixxat PC 接口卡具有PCI、PCIe 或 USB、以太网和蓝牙模块版本,使移动机器人制造商能够选择最适合其需求的选项。
USB-to-CAN
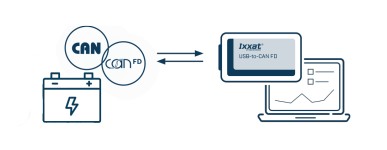 移动 USB-to-CAN 接口,方便 CAN (FD) 总线访问实现配置、服务和分析。
移动 USB-to-CAN 接口,方便 CAN (FD) 总线访问实现配置、服务和分析。
CAN-IB 系列
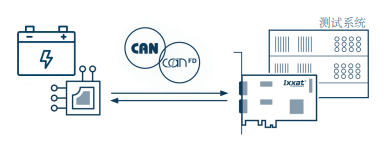 功能强大的 CAN (FD) 插件板使测试/仿真系统连接到汽车总线系统或设备。
功能强大的 CAN (FD) 插件板使测试/仿真系统连接到汽车总线系统或设备。
CANblue II
 无线连接到汽车总线系统,实现灵活的分析、配置和测试。
无线连接到汽车总线系统,实现灵活的分析、配置和测试。
EMI 防护
Ixxat 中继器在物理层上分离网络,充当 EMI 过滤器并增添电气隔离,从而保护电子产品免受 EMI 的干扰。
这一功能使移动机器人制造商能将容易受 EMI 影响的部分(如电池模块)与其它部分(如传感器模块)隔离,或将高压控制系统与电池管理系统的其余部分分离。对于需强力或长期电气隔离的场景,HMS 的 CAN 中继器可作为铜线到光纤转换器使用,提供优异的 EMI 防护。
4. 根据现场需求建立不同的无线连接
移动机器人制造商在无线连接领域所面临的一个主要挑战是,如何便捷地更改无线技术,从而满足特定环境中的网络需求。
无线和蜂窝技术标准
Anybus 无线堡(Wireless Bolt)系列产品解决了此问题,它们提供了蓝牙、Wi-Fi 和蜂窝版本(通过 NB-IoT 和 CAT-M1 标准,或通过高速 LTE Cat 4)。无线堡安装便捷,支持不同版本的更换,满足移动机器人制造商的现场需求。
无线堡介绍视频
Anybus 无线堡达到IP66 和 IP67 等级的防护要求,可直接安装在移动机器人上。为确保整个场地的连接覆盖,用户可以将无线堡与一个或多个工业无线接入点配对。
左:Anybus Wireless Bolt
右:Anybus Wireless Bridge
Anybus 无线桥(Wireless Bolt)则可以作为无线接入点使用。Bolt 与 Bridge 的组合已被多个客户成功使用。
规划和检查设施
在安装无线解决方案之前,建议进行基于设施图纸的预测性现场勘察,以确保移动机器人在整个场地内都有足够的信号覆盖。现场勘察应识别接入点的最佳位置、合适的天线类型、天线方向,以及如何减少干扰。安装完成后,可使用无线嗅探工具检查设计,并根据需要调整接入点或天线。
选购 HMS 产品后,我们的专业售前工程师将帮助您规划和检查网络设施,协助无线硬件安装,并对安装进行微调。
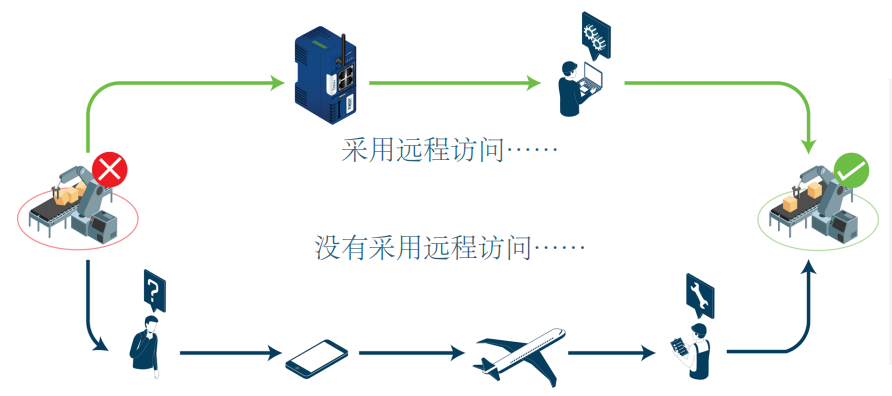
5. 远程访问移动机器人
通过远程访问,移动机器人供应商或工程师无需前往现场,就能迅速排除故障并解决大多数问题,提升客户体验,并最大限度地减少停机时间。
易用且可靠
Ewon 的设备和工业云服务能够帮助移动机器人制造商迅速建立安全远程连接。Ewon Cosy是一款工业路由器,Ewon Flexy则集工业路由器和物联网网关于一体。这两款设备均连接到工业云Talk2M,使得远程访问和检查变得直观易用。Talk2M 的设计非常直观明了,用户只需要一点培训和 IT 技能就可以使用该软件。
Ewon Flexy 及扩展卡
移动机器人制造商可以利用配备 Talk2M 的设备来排除故障、修正 PLC 错误、远程操作人机界面或操作 IP 摄像头。这两款设备与绝大多数 PLC 和旧设备兼容。
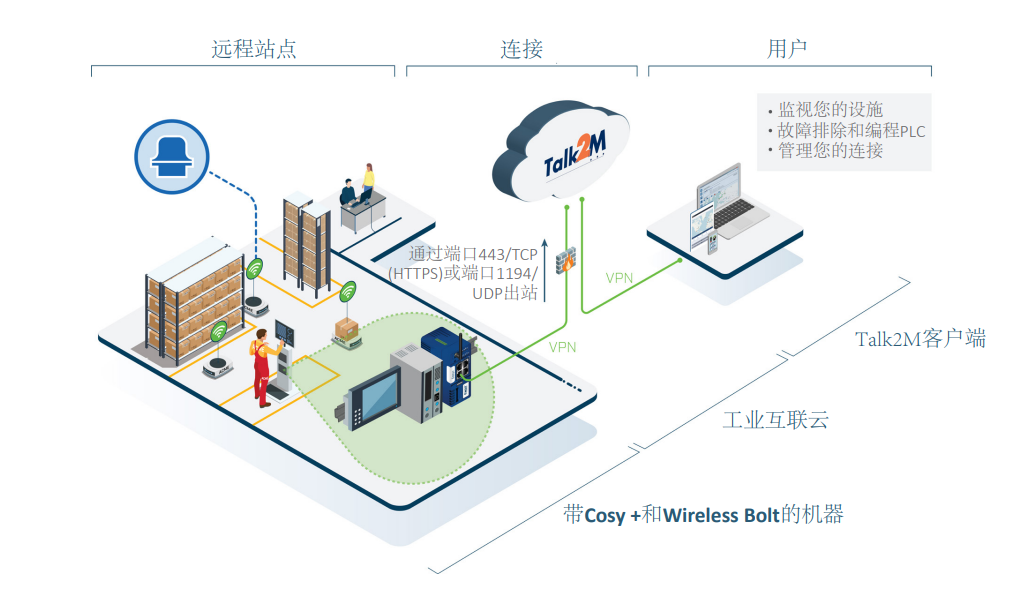 Talk2M 工业云使用户可以远程连接到他们的机器
Talk2M 工业云使用户可以远程连接到他们的机器
Ewon Flexy 也可作为工业物联网网关,监控和收集关键性能指标,从而优化操作有效性。它可以将数据从机器传输到云端,方便深入分析和预测性维护。
Ewon 在21个数据中心的30多台服务器上部署了 Talk2M,以确保冗余和全球覆盖。
网络安全
Ewon 通过采取多层安全策略,将安全性整合到每一个远程访问产品和软件应用程序中。借助此策略,Ewon 可以克服诸多安全挑战,从而获得 IT 部门的批准。
移动机器人需要强健、全面的通信技术,确保安全、高效地运输物资。对于移动机器人制造商来说,自行开发所需技术既复杂又耗时,选择 HMS 的解决方案既经济又高效。
HMS 在北京和苏州都设有办公室,为客户提供优质的本地化服务。
从方案咨询到验证,我们凭借专业知识和丰富产品,助您快速克服移动机器人通信和安全挑战,成为您的优选通信合作伙伴。
审核编辑:彭菁
-
控制器
+关注
关注
113文章
16568浏览量
180406 -
硬件
+关注
关注
11文章
3416浏览量
66692 -
工业网络
+关注
关注
0文章
93浏览量
16491 -
移动机器人
+关注
关注
2文章
778浏览量
33746 -
HMS
+关注
关注
0文章
120浏览量
6713
原文标题:AGV/AMR 领域的 5 大通信挑战是什么?HMS 带您逐个击破
文章出处:【微信号:麦克泰技术,微信公众号:麦克泰技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论