 “高精度”定位技术RTK,仅仅是差分GPS吗?
“高精度”定位技术RTK,仅仅是差分GPS吗?
高精度”定位技术RTK,仅仅是差分GPS吗?
高精度定位技术
关于高精度定位技术,RTK为业界熟知且被广泛应用,那么RTK到底是什么?仅仅是差分GPS吗?
其实并不尽然。
RTK
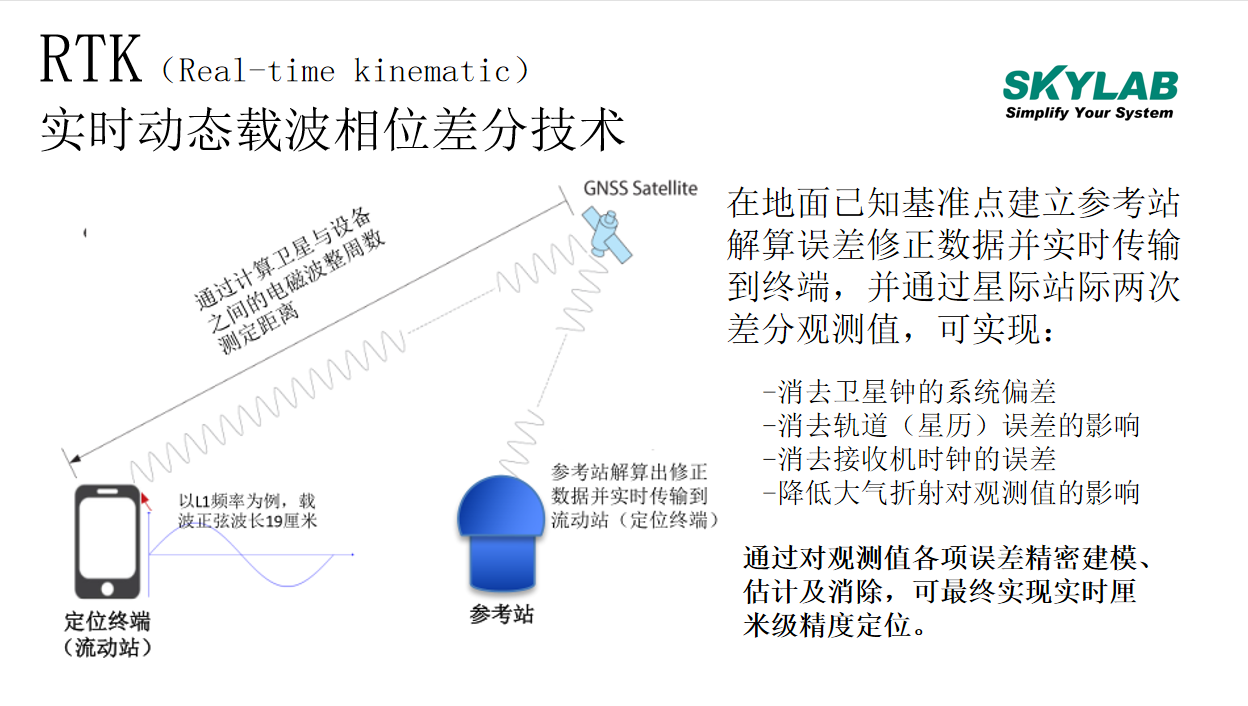
RTK,载波相位差分技术,是实时处理两个测站载波相位观测量的差分方法,英文全称Real Time Kinematic,译为实时动态,然后这个实时动态是怎么来的,RTK现如今在智能驾驶中处于什么地位?
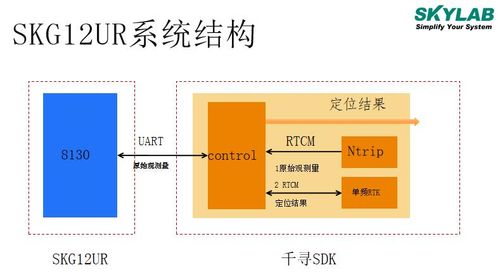
RTK是将基准站采集的载波相位发给用户接收机,进行求差解算坐标。载波相位差分可使定位精度达到厘米级。目前测量中常用的动态测量方法主要是RTK和连续运行参考站系统( Continuous Operational Reference Systems)简称CORS。
1
传统RTK****
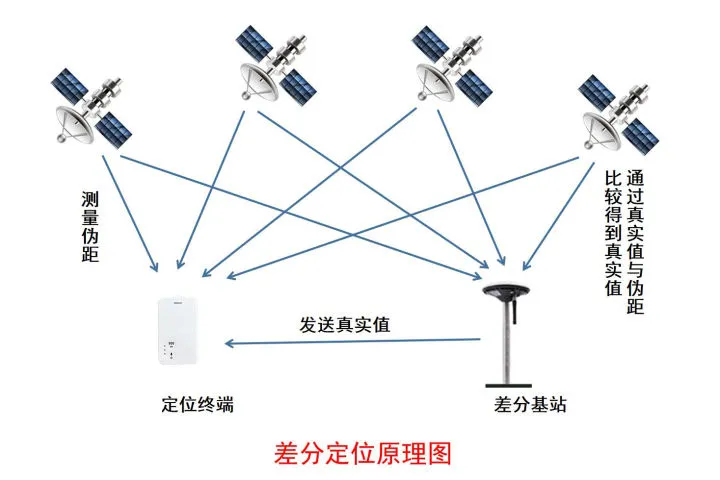
所谓RTK定位是将参考站的单点定位的观测结果与参考站的已知坐标进行比较,计算出参考站至卫星的距离改正数,并将改正数发送给移动台,移动台则根据参考站的改正数,实时对定位结果进行改正,从而提高定位精度。目前单基站RTK定位方法中有伪距法和载波相位法,因载波相位差分法比其他几种方法的精度要高,因此目前市场上主流RTK仪器的解算方法也多为载波相位差分法。
2
CORS
CORS可以定义为一个或若干个固定的、连续运行的GNSS参考站,利用现代计算机、数据通信和互联网(LAN/WAN)技术组成的网络,实时地向不同的类型、不同需求、不同层次的用户自动地提供经过检验的不同类型的GNSS观测值(载波相位,伪距),各种改正数、状态信息、以及其他有关的GNSS服务项目的系统。它是在RTK技术的基础上发展而来。
CORS技术在用途上可以分成单基站CORS、多基站CORS和网络CORS。
单基站CORS:**** 就是只有一个连续运行站。类似于一加一或一加多的RTK,只不过基准站是由一个连续运行的基站代替,基站同时又是一个服务器,通过NRS-SERVER软件实时监控卫星状态,存储静态数据和实时通过网络向移动站(用户终端)发送差分信息。
多基站CORS:**** 就是分布在一定区域内的多个基站联合作业,基站与基站之间的距离不超过50公里,他们都将数据发送到一个服务器。移动站作业时,只要发送它的位置信息到服务器,系统自动计算移动站与各个基站之间的距离,将距离近的基站差分数据发送给流动站,确保达到最佳的测量精度。多基站CORS作业原理与单基站基本相同。
网络CORS:**** 就是采用网络参考站系统软件,对分布在一定区域内的多台基准站的坐标和实时观测数据进行系统综合误差改正建模,尽可能消除区域内流动站观测数据的系统综合误差,从而获得高精度的实时定位结果。
RTK和CORS有区别吗? 当然,CORS是固定的永不断电的基站,优点就是作用距离远,作业方便,缺点是费电,维护费用高,局限某个地区;RTK是可移动的基站作业,优点是机动性强、可以跨地区工作,缺点是做点校正繁琐。
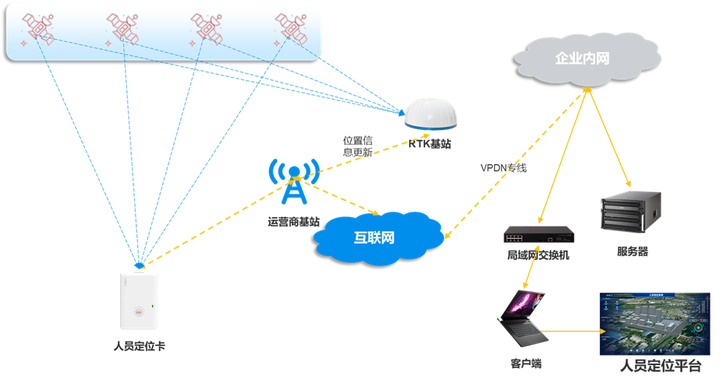
无论是RTK还是CORS都需要基站的支持才能使用,目前国内部分城市已经建成覆盖全市区的CORS,移动站需要登录才能使用。
3
SBAS(DGPS)
SBAS(Satellite-Based Augmentation System),即星基增强系统,通过地球静止轨道(GEO)卫星搭载卫星导航增强信号转发器,可以向用户播发星历误差、卫星钟差、电离层延迟等多种修正信息,实现对于原有卫星导航系统定位精度的改进,从而成为各航天大国竞相发展的手段。目前,全球已经建立起了多个SBAS系统,如美国的WAAS(Wide Area Augmentation System)、俄罗斯的SDCM(System for Differential Corrections and Monitoring)、欧洲的EGNOS(European Geostationary Navigation Overlay Service)、日本的MSAS(Multi-functional Satellite Augmentation System)以及印度的GAGAN(GPS Aided Geo Augmented Navigation)。
上述SBAS系统的工作原理大致相同。首先,由大量分布极广的差分站(位置已知)对导航卫星进行监测,获得原始定位数据(伪距、卫星播发的相位等)并送至中央处理设施(主控站),后者通过计算得到各卫星的各种定位修正信息,通过上行注入站发给GEO卫星,最后将修正信息播发给广大用户,从而达到提高定位精度的目的。
SBAS服务可以免费使用,但部分地区没有信号覆盖。在定位板卡模块中以参数“DGPS”给出定位精度,一般精度为0.4m。
4
PPP- RTK
实时动态定位RTK(Real-Time Kinematic)以及精密单点定位PPP(Precise Point Positioning)是高精度卫星导航定位中应用最为广泛、最具代表性的技术。
2005年,PPP-RTK的概念被首次提出,通过CORS网数据处理将GNSS各类误差在“状态域”建模,采用非差PPP实现与RTK相当的定位效果。
PPP-RTK通过状态域建模,将基准站“观测值误差”分解为卫星轨道、卫星钟差、卫星相位偏差、电离层延迟、对流程延迟等“状态量误差”,因此RTK和PPP/PPP-RTK也分别称为“观测值域差分”和“状态域差分”。 不严格的说,数学意义上可以认为卫星轨道、卫星钟差、卫星相位偏差、电离层延迟、对流程延迟等状态量误差构成了GNSS观测误差空间的一组极大线性无关向量组,即构成了GNSS观测误差空间的一组基。该空间中任意向量,即观测值误差都可以认为是该组基向量的线性组合:基向量在对应卫星-接收机视线方向上的投影。
PPP-RTK是一种更具弹性的服务模式,主要体现在,卫星轨道钟差、相位偏差作为GNSS高精度定位的基础,可采用状态域表达实现星基增强服务,对于电离层延迟、对流层延迟增强,则可通过采样频率的调整以满足不同参考站密度、不同播发带宽、不同用户性能需求。
审核编辑 黄宇
-
gps
+关注
关注
22文章
2907浏览量
167091 -
定位
+关注
关注
5文章
1353浏览量
35579 -
RTK
+关注
关注
8文章
132浏览量
37685
发布评论请先 登录
相关推荐
高精度定位技术RTK(实时动态定位:Real-TimeKinematic)
剖析三星七频无人机天线搭配差分GPS模块精准定位定向
支持RTK的两款高精度定位模块
介绍一个支持RTK差分定位的高精度导航定位模块
一文读懂RTK技术及支持RTK高精度定位模块应用方向
北斗RTK高精度定位技术原理及优势
GPS/北斗RTK差分定位系统的原理以及应用领域
北斗RTK高精度定位技术原理、技术优势及应用领域

GPS/北斗RTK差分定位系统的技术原理以及应用领域





 工商网监
工商网监
评论