 CPU缓存基础知识
CPU缓存基础知识
本文转自“芯片验证日记”
本篇文章主要聚焦CPU Cache,文章比较长,主要分成这么几个部分:
缓冲基础知识
缓存的命中
缓冲的一致性
延伸阅读
文中会讲述一些多核 CPU 的系统架构以及其原理。这篇文章我会尽量地写简单和通俗易懂一些,主要是讲清楚相关的原理和问题,而对于一些细节和延伸阅读我会在文章最后会给出相关的资源
因为无论你写什么样的代码都会交给CPU来执行,所以,如果你想写出性能比较高的代码,这篇文章中提到的技术还是值得认真学习的。另外,千万别觉得这些东西没用,这些东西非常有用,十多年前就是这些知识在性能调优上帮了我的很多大忙,从而跟很多人拉开了差距……
1缓存基础知识
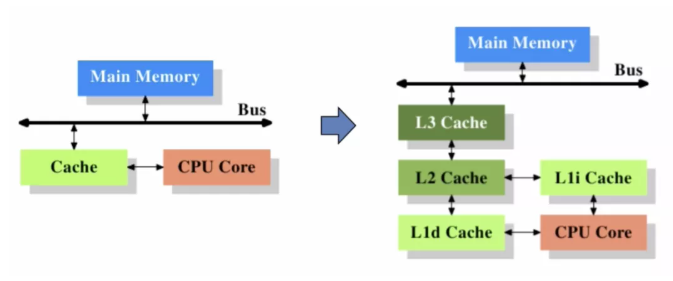
首先,我们都知道现在的CPU多核技术,都会有几级缓存,老的CPU会有两级缓存(L1和L2),新的CPU会有三级缓存(L1,L2,L3 ),如下图所示:
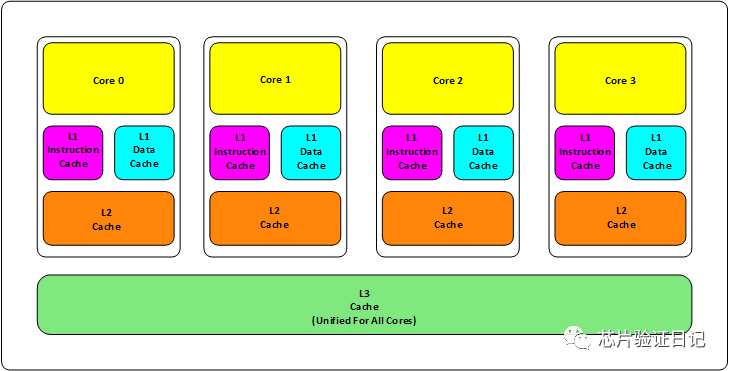
其中:
L1缓存分成两种,一种是指令缓存,一种是数据缓存。L2缓存和L3缓存不分指令和数据。
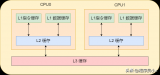
L1缓存和L2缓存在每一个CPU核中,L3则是所有CPU核心共享的缓存。
L1、L2、L3缓存离CPU越近就越小,速度也越快,离CPU越远,速度就越慢。
再往后面就是内存,内存的后面就是硬盘。我们来看一些他们的速度:
L1 的存取速度:4 个CPU时钟周期
L2 的存取速度:11 个CPU时钟周期
L3 的存取速度:39 个CPU时钟周期
RAM内存的存取速度:107 个CPU时钟周期
我们可以看到,L1的速度是RAM的27倍,但是L1/L2的大小基本上也就是KB级别的,L3会是MB级别的。例如:Intel Core i7-8700K ,是一个6核的CPU,每核上的L1是64KB(数据和指令各32KB),L2 是 256K,L3有2MB(我的苹果电脑是 Intel Core i9-8950HK,和Core i7-8700K的Cache大小一样)。
我们的数据就从内存向上,先到L3,再到L2,再到L1,最后到寄存器进行CPU计算。为什么会设计成三层?这里有下面几个方面的考虑:
一个方面是物理速度,如果要更大的容量就需要更多的晶体管,除了芯片的体积会变大,更重要的是大量的晶体管会导致速度下降,因为访问速度和要访问的晶体管所在的位置成反比,也就是当信号路径变长时,通信速度会变慢。这部分是物理问题。
另外一个问题是,多核技术中,数据的状态需要在多个CPU中进行同步,并且,我们可以看到,cache和RAM的速度差距太大,所以,多级不同尺寸的缓存有利于提高整体的性能。
这个世界永远是平衡的,一面变得有多光鲜,另一面也会变得有多黑暗。建立这么多级的缓存,一定就会引入其它的问题,这里有两个比较重要的问题,
一个是比较简单的缓存的命中率的问题。
另一个是比较复杂的缓存更新的一致性问题。
尤其是第二个问题,在多核技术下,这就很像分布式的系统了,要对多个地方进行更新。
2缓存的命中
在说明这两个问题之前。我们需要了解一个术语 Cache Line。缓存基本上来说就是把后面的数据加载到离自己近的地方,对于CPU来说,它是不会一个字节一个字节的加载的,因为这非常没有效率,一般来说都是要一块一块的加载的,对于这样的一块一块的数据单位,术语叫“Cache Line”,一般来说,一个主流的CPU的Cache Line 是 64 Bytes(也有的CPU用32Bytes和128Bytes),64Bytes也就是16个32位的整型,这就是CPU从内存中捞数据上来的最小数据单位。
比如:Cache Line是最小单位(64Bytes),所以先把Cache分布多个Cache Line,比如:L1有32KB,那么,32KB/64B = 512 个 Cache Line。
一方面,缓存需要把内存里的数据放进来,英文叫 Cache Associativity。Cache的数据放置策略决定了内存中的数据块会拷贝到CPU Cache中的哪个位置上,因为Cache的大小远远小于内存,所以,需要有一种地址关联的算法,能够让内存中的数据可以被映射到Cache中来。这个有点像内存地址从逻辑地址向物理地址映射的方法,但不完全一样。
基本上来说,我们会有如下的一些方法。
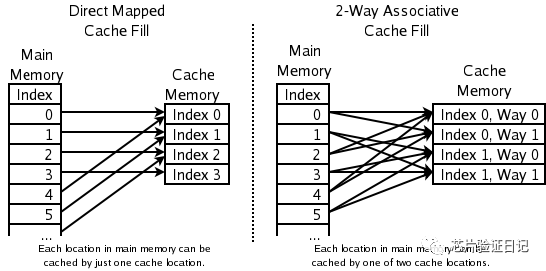
一种方法是,任何一个内存地址的数据可以被缓存在任何一个Cache Line里,这种方法是最灵活的,但是,如果我们要知道一个内存是否存在于Cache中,我们就需要进行O(n)复杂度的Cache遍历,这是很没有效率的。
另一种方法,为了降低缓存搜索算法,我们需要使用像Hash Table这样的数据结构,最简单的hash table就是做“求模运算”,比如:我们的L1 Cache有512个Cache Line,那么,公式(内存地址 mod 512)* 64就可以直接找到所在的Cache地址的偏移了。但是,这样的方式需要我们的程序对内存地址的访问要非常地平均,不然冲突就会非常严重。这成了一种非常理想的情况了。
为了避免上述的两种方案的问题,于是就要容忍一定的hash冲突,也就出现了 N-Way 关联。也就是把连续的N个Cache Line绑成一组,然后,先找到相关的组,然后再在这个组内找到相关的Cache Line。这叫 Set Associativity。如下图所示。
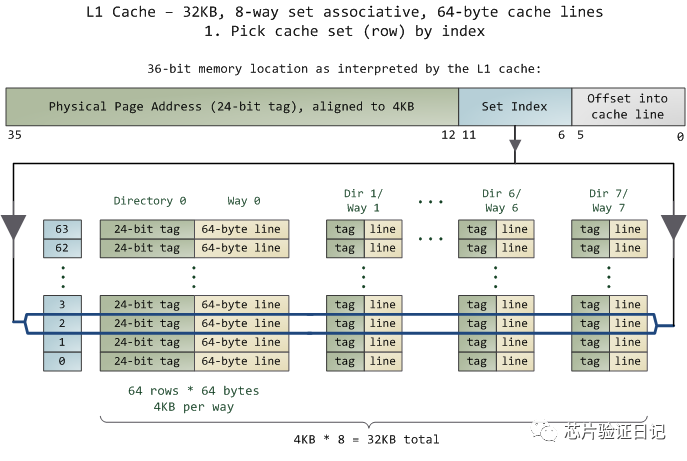
对于 N-Way 组关联,可能有点不好理解,这里个例子,并多说一些细节(不然后面的代码你会不能理解),Intel 大多数处理器的L1 Cache都是32KB,8-Way 组相联,Cache Line 是64 Bytes。这意味着,
32KB的可以分成,32KB / 64 = 512 条 Cache Line。
因为有8 Way,于是会每一Way 有 512 / 8 = 64 条 Cache Line。
于是每一路就有 64 x 64 = 4096 Byts 的内存。
为了方便索引内存地址,
Tag:每条 Cache Line 前都会有一个独立分配的 24 bits来存的 tag,其就是内存地址的前24bits
Index:内存地址后续的6个bits则是在这一Way的是Cache Line 索引,2^6 = 64 刚好可以索引64条Cache Line
Offset:再往后的6bits用于表示在Cache Line 里的偏移量
如下图所示:(图片来自《Cache: a place for concealment and safekeeping》)
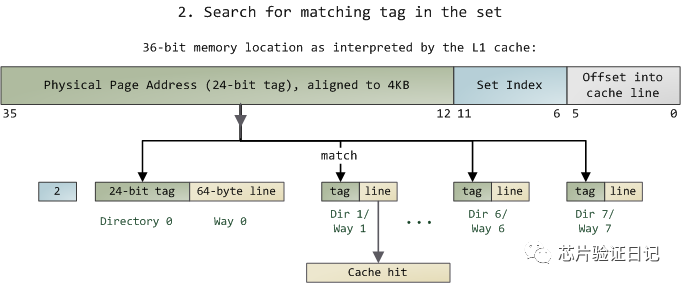
当拿到一个内存地址的时候,先拿出中间的 6bits 来,找到是哪组。
然后,在这一个8组的cache line中,再进行O(n) n=8 的遍历,主要是要匹配前24bits的tag。如果匹配中了,就算命中,如果没有匹配到,那就是cache miss,如果是读操作,就需要进向后面的缓存进行访问了。L2/L3同样是这样的算法。而淘汰算法有两种,一种是随机一种是LRU。现在一般都是以LRU的算法(通过增加一个访问计数器来实现)
这也意味着:
L1 Cache 可映射 36bits 的内存地址,一共 2^36 = 64GB的内存
当CPU要访问一个内存的时候,通过这个内存中间的6bits 定位是哪个set,通过前 24bits 定位相应的Cache Line。
就像一个hash Table的数据结构一样,先是O(1)的索引,然后进入冲突搜索。
因为中间的 6bits 决定了一个同一个set,所以,对于一段连续的内存来说,每隔4096的内存会被放在同一个组内,导致缓存冲突。
此外,当有数据没有命中缓存的时候,CPU就会以最小为Cache Line的单元向内存更新数据。当然,CPU并不一定只是更新64Bytes,因为访问主存实在是太慢了,所以,一般都会多更新一些。好的CPU会有一些预测的技术,如果找到一种pattern的话,就会预先加载更多的内存,包括指令也可以预加载。这叫 Prefetching 技术 (参看,Wikipedia 的 Cache Prefetching 和纽约州立大学的 Memory Prefetching)。比如,你在for-loop访问一个连续的数组,你的步长是一个固定的数,内存就可以做到prefetching。(注:指令也是以预加载的方式执行,参看本站的《代码执行的效率》中的第三个示例)
了解这些细节,会有利于我们知道在什么情况下有可能导致缓存的失效。
3缓存的一致性
对于主流的CPU来说,缓存的写操作基本上是两种策略(参看本站《缓存更新的套路》),
一种是Write Back,写操作只写在cache上,然后再flush到内存上。
一种是Write Through,写操作同时写到cache和内存上。
为了提高写操作的性能,一般来说,主流的CPU(如:Intel Core i7/i9)采用的是Write Back的策略,因为直接写内存实在是太慢了。
好了,现在问题来了,如果有一个数据 x 在 CPU 第0核的缓存上被更新了,那么其它CPU核上对于这个数据 x 的值也要被更新,这就是缓存一致性的问题。(当然,对于我们上层的程序我们不用关心CPU多个核的缓存是怎么同步的,这对上层的代码来说都是透明的)
一般来说,在CPU硬件上,会有两种方法来解决这个问题。
Directory 协议。这种方法的典型实现是要设计一个集中式控制器,它是主存储器控制器的一部分。其中有一个目录存储在主存储器中,其中包含有关各种本地缓存内容的全局状态信息。当单个CPU Cache 发出读写请求时,这个集中式控制器会检查并发出必要的命令,以在主存和CPU Cache之间或在CPU Cache自身之间进行数据同步和传输。
Snoopy 协议。这种协议更像是一种数据通知的总线型的技术。CPU Cache通过这个协议可以识别其它Cache上的数据状态。如果有数据共享的话,可以通过广播机制将共享数据的状态通知给其它CPU Cache。这个协议要求每个CPU Cache 都可以“窥探”数据事件的通知并做出相应的反应。如下图所示,有一个Snoopy Bus的总线。
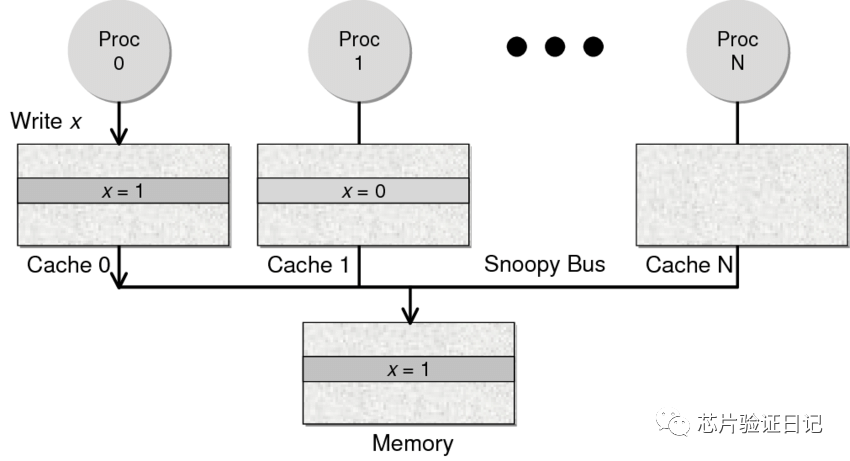
因为Directory协议是一个中心式的,会有性能瓶颈,而且会增加整体设计的复杂度。而Snoopy协议更像是微服务+消息通讯,所以,现在基本都是使用Snoopy的总线的设计。
这里,我想多写一些细节,因为这种微观的东西,让人不自然地就会跟分布式系统关联起来,在分布式系统中我们一般用Paxos/Raft这样的分布式一致性的算法。而在CPU的微观世界里,则不必使用这样的算法,原因是因为CPU的多个核的硬件不必考虑网络会断、会延迟的问题。所以,CPU的多核心缓存间的同步的核心就是要管理好数据的状态就好了。
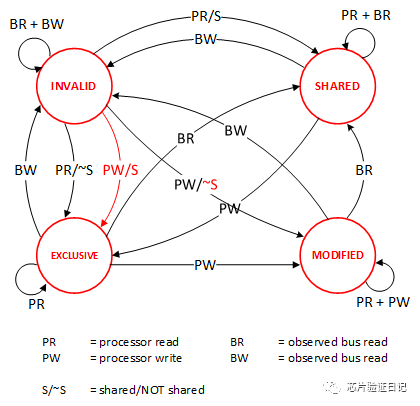
这里介绍几个状态协议,先从最简单的开始,MESI协议,这个协议跟那个著名的足球运动员梅西没什么关系,其主要表示缓存数据有四个状态:Modified(已修改), Exclusive(独占的),Shared(共享的),Invalid(无效的)。
这些状态的状态机如下所示(有点复杂,你可以先不看,这个图就是想告诉你状态控制有多复杂):
下面是个示例(如果你想看一下动画演示的话,这里有一个网页(MESI Interactive Animations),你可以进行交互操作,这个动画演示中使用的Write Through算法):
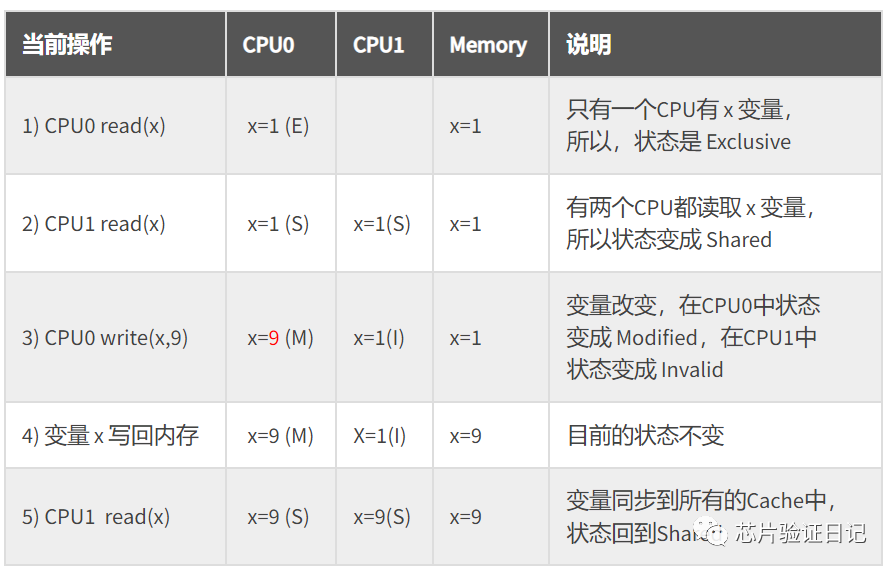
MESI 这种协议在数据更新后,会标记其它共享的CPU缓存的数据拷贝为Invalid状态,然后当其它CPU再次read的时候,就会出现 cache miss 的问题,此时再从内存中更新数据。从内存中更新数据意味着20倍速度的降低。我们能不能直接从我隔壁的CPU缓存中更新?是的,这就可以增加很多速度了,但是状态控制也就变麻烦了。还需要多来一个状态:Owner(宿主),用于标记,我是更新数据的源。于是,出现了 MOESI 协议
MOESI协议的状态机和演示示例我就不贴了(有兴趣可以上Berkeley上看看相关的课件),我们只需要理解MOESI协议允许 CPU Cache 间同步数据,于是也降低了对内存的操作,性能是非常大的提升,但是控制逻辑也非常复杂。
顺便说一下,与 MOESI 协议类似的一个协议是MESIF,其中的 F 是 Forward,同样是把更新过的数据转发给别的 CPU Cache 但是,MOESI 中的 Owner 状态 和MESIF 中的 Forward 状态有一个非常大的不一样——Owner状态下的数据是dirty的,还没有写回内存,Forward状态下的数据是clean的,可以丢弃而不用另行通知。
需要说明的是,AMD用MOESI,Intel用MESIF。所以,F 状态主要是针对 CPU L3 Cache 设计的(前面我们说过,L3是所有CPU核心共享的)。(相关的比较可以参看StackOverlow上这个问题的答案)
-
控制器
+关注
关注
113文章
16508浏览量
179970 -
cpu
+关注
关注
68文章
10929浏览量
213452 -
时钟
+关注
关注
11文章
1750浏览量
131948 -
缓存
+关注
关注
1文章
243浏览量
26793
原文标题:CPU缓存基础及命中率,一致性等问题
文章出处:【微信号:IC学习,微信公众号:IC学习】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
CPU对齐访问的基础知识
通信基础知识教程
什么是CPU一级缓存/二级缓存?
CPU缓存是什么意思_CPU缓存有什么作用
缓存如何工作,如何设计CPU缓存
CPU缓存的作用及原理有哪些
CPU缓存知识科普






 工商网监
工商网监
评论