 智能驾驶该考虑“防沉迷”了?
智能驾驶该考虑“防沉迷”了?
刚好十年前的2013年7月6日,一架韩亚航空波音777客机在抵达旧金山机场降落时发生事故,机尾提前触地并解体脱落,造成3名中国乘客不幸遇难。
777一直是安全纪录较好的机型之一,这起韩亚航空214号航班空难,也确实与波音没太大关系,而主要归咎于机组的操作不当。
空难调查结果令人震惊,尽管机长有着近1万小时的飞行经验,但手动驾驶飞机着陆的次数却屈指可数。韩亚航空甚至有规定鼓励飞行员尽可能使用自动系统,而很少训练手动降落。
“如果把他的飞行总时长减去自动驾驶的时间,剩下的手动飞行经验可能只有几百个小时。”
现代航空早已拥有了全自动化的降落指引系统,机场设备发出信号,引导飞机全自动下降并着陆。然而在空难发生时,旧金山机场的自动降落指引系统刚好处于暂时停用的状态。
于是韩亚214航班必须自主降落。由于缺乏手动驾驶经验,机组做出一系列混乱操作,无意之中切断了飞机的自动油门,彻底失去了自动系统的保护。而当他们意识到飞机此刻全由自己掌控时,为时已晚。
韩亚214空难是一起非常经典的“自动化依赖”事故,它至少揭示了三个重要问题:
1.现代自动化技术提高了安全性,但随着自动化程度提高、自动化系统增多,各个自动控制系统彼此之间的逻辑关系,可能会让操作者更加难以理解记忆,难以判断各系统所处的工作状态(如是否正常);
2.尽管概率很小,但在自动化系统中,一旦某些可能并不起眼的组成部分遭遇特殊状况,操作者的手动技艺就可能会是事关生死的最后保障;
3.不同公司的自动化体系、设计理念可能存在很大差异,A公司产品的资深操作者切换到B公司产品需要重新适应(韩亚214机长更熟悉空客的自动驾驶,但事故发生时刚转飞波音)。
就像“AutoPilot”这个代表性的名字就来自于航空业,汽车智能辅助驾驶的发展,也可能将要面对类似的隐患。
当极小概率走向可能
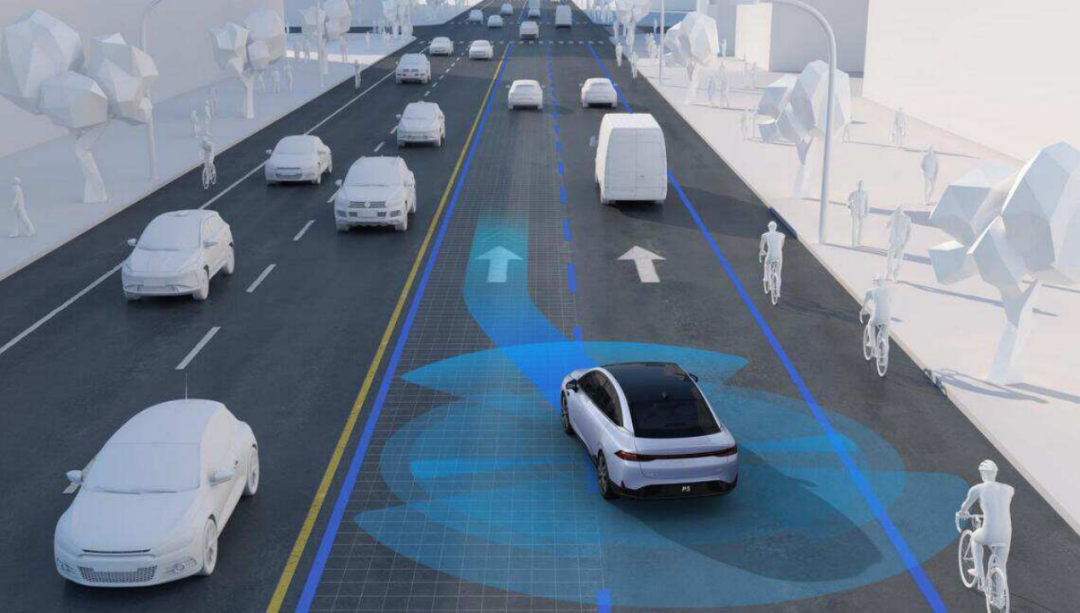
以新势力、自主品牌为代表,智能辅助驾驶正在步入NOA领航辅助时代,NOA成为新的兵家必争之地。今天这些领航辅助系统已经从高速走向城市,从依赖高精地图渐渐走向“无图”。
覆盖范围越来越广,人为干预的需求也在减少。各家都会着重宣传“低接管率”,媒体实测时一定会注意并强调“XXX公里零接管”。接管率越低越安全,俨然成了默认的共识。
当下优秀的NOA功能,已经可以做到平均百公里一次级别的低接管率。在实际使用中,高速路况不乏数百公里无接管请求的情况,即便更复杂的城区几十公里无需人为干预也已成为可能。
当NOA覆盖区域扩大到城区,当现实中较为理想路况下的接管率可能极低,甚至还出现了“定制化”的通勤NOA(专门针对用户高频通勤路线训练、开通和优化),一种概率很小但已然存在的可能性出现了:
假想一位刚拿到驾照的驾驶员,每天仅固定来往于一条路况简单的NOA覆盖路线上,他完全可以上车即开启NOA直到抵达目的地。如果不遭遇意外,几年如一日,理论上他完全有可能从未手动驾驶过车辆。
那么问题来了,假如上述情况成立,这位合法驾驶员究竟算是一位有着几年驾龄的老手,还是一位早已丢失了基本驾驶技能的“纸上司机”呢?
(当然肯定会有朋友想到,生活中也有不少拿了驾照多年不开车、早已失去驾驶能力却具备合法驾驶员身份的人。但我们不能因为已存在的不合理,而认为另一种不合理就是合理的,驾考一旦通过便终身有效的合理性本就存疑。)
再进一步,就个体而言,当这样一位驾驶员有一天突然需要驾车前往未覆盖区域,当领航辅助行驶中某个自动驾驶的相关部件突然失效(哪怕只是按钮掉了),当天气突然恶化到辅助驾驶无法继续工作……
一旦突发意外状况,哪怕只是简单而本来无关痛痒的小意外,我们是否可以认为他有能力对情况做出判断,以及有能力安全地手动接管呢?
当然,以上这些极端情况叠加的概率其实很小。既需要个体出行规律的特殊性(仅通勤于固定且理想的路线),需要客观上的运气,还需要该NOA确实足够成熟,真实生活中很难满足让驾驶者长期无手动驾驶和手动接管机会的条件。
但是具体事例是否有可能、有多大可能、现在是否已可能发生并不重要,重要的是随着成熟度进步和覆盖区扩大,城市NOA已然让这种极端情况从“完全不可能”走向了“有极小可能,且会越来越大”。
只提供高速NOA的时代,无论接管率再低,也不可能存在驾驶员上车即开启领航辅助的情况,除非他一辈子活在高速里。
但当覆盖到城市,即便只覆盖了部分城区,也让“始终仅活动于覆盖范围内”的极端个例有了可能性。随着城区NOA范围扩大,通勤NOA的出现,这种极端或者说理想情况将越来越成为现实可能。
绝大多数或者说几乎所有道路环境,都不大可能始终如一地给辅助驾驶一个干净、简单、无意外的理想环境。但如果有极少数个体,永远只在理想交通环境出行,避开了所有corner case,这并非不可想象。
当下潜在的具体危险也许还很小,但站在现在设想未来,作为一个可能的方向,随着NOA覆盖越来越大、接管率越来越低,今天看来条件苛刻的极小概率事件,将会越来越不再是极小概率。
除了“多年零接管、从未手动驾驶”这种凭空设想出的极端绝对案例之外(尽管理论上已经可能),用相对的眼光看问题,随着自动化辅助技术的发展,手动驾驶的机会大幅减少,驾驶员正确、安全接管车辆的能力将逐渐被打上一个问号。
辅助驾驶系统的接管率再低,只要不是真正的零接管,并非真正意义上的全自动驾驶,也终究要求驾驶者拥有手动接管即手动驾驶的能力。
驾驶者的驾驶能力,必须要能“覆盖”辅助驾驶的能力范围。一个从未手动行驶过高速公路的人,很难信任他在NOA以120km/h行驶遭遇意外导致系统突然失效的时候,有能力及时接管车辆确保安全。
我们都是概率盲
今天人们普遍视低接管率为贵,就评价技术成熟度当然有一定道理,却不等同于实际使用中“更安全”。自动化程度更高意味着技术优越性,但个体不做任何准备未必能将技术优越性转化为现实收益。
“能”的范围扩大,当然会带来安全性提升的前提基础;但如果“能”的范围扩大之后,使用者开始忽视小概率的“不能”,后果也可能适得其反。
在全自动驾驶遥不可期的前提下,NOA这样的高阶辅助驾驶功能依然要求驾驶者全程准备接管。于是尽管低接管率客观上提供了更安全的基础,实际中取决于使用者的认知,却未必能体现为更安全。
举个例子就好理解,假如某NOA功能的平均接管率为每十公里一次时,驾驶员多半会全神贯注以便随时应对意外;而当平均接管率达到每百公里一次时,驾驶者还会时刻保持警惕吗?每五百公里一次时呢?
即便平均接管率低至每千公里一次,假如这一次发生时驾驶者未做好接管准备,其危险程度也并不会因为接管率低而打个折扣。
必须指出,所谓平均接管率并不等于“大致每xx公里就会出现一次接管请求”,平均≠均等。NOA请求人工接管是一种随机事件,路面发生超出NOA能力的极端情况更是随机事件,并无任何规律可言。
只有当样本数量无限大的时候,只有当行驶里程无穷多的时候,才可以认为每一时刻需要接管的概率是相等的——这显然不可能。所以平均接管率“xx公里”只是一个事后总结的数据,与实际使用无关。
平均接管率每百公里一次的系统,可能行驶几百公里也无需人为接管,也可能下一秒种就发出警报。这既取决于路况的客观差异,也可能受意外状况干扰,完全不可预测。
于是可以想象一种反直觉的现象:接管率低、高度成熟的NOA,对安全性的影响可能是提高,但同时也可能是降低。因为更成熟的自动化系统在提高客观安全性的同时,也给了人们主观安全意识降低的机会。
今天,各家NOA突然“掉线”、做出危险动作的案例,网络上已不鲜见。如果说在NOA还不算可靠,驾驶者还保有一定警惕性的今天,未能及时接管的风险已然存在,那么当NOA更加成熟、接管频率更低,是否会有更多驾驶者对它过度信任呢?
只要NOA一天没有进化和被认定为全自动驾驶系统,手动干预接管的频率再低,其可能性也不能被个体忽略:当后果过于严重,即便群体概率只有万分之一,一旦落在个体身上却会成为100%。
“人类从来不是擅长概率的动物”,在流行叙事中人们往往将“风险”理解成“危险”,而实际上风险更准确的定义是“未知、不可预测”,可预知的危险往往便不是风险。
即便风险极小,但若其后果严重到令人无法承受,那么这一丁点风险也必须加倍重视。低接管率的宣传很容易让人们将目光放在“风险概率极小”,而忽视掉其后果的严重程度是否有所减轻(并没有)。
所以我们可以理解,哪怕NOA进化到平均接管率低至千公里、万公里一次,车企们也依旧不会仅仅因此便将其称为自动驾驶系统。否则哪怕只发生一次恶性事故,其后果也足以毁掉任何一家车企。
而今天已经打出L3招牌的车企,比如奔驰对于自家L3系统的使用范围限定和权责划分极为明确和决绝。人家并非不知道国内NOA有多大本事、群众喜闻乐见什么,但L3终究是需要车企担责,谁疼谁自己会知道。
首先只在部分高速路段且限定车速(目前60km/h以下),即便真的出现事故也很难超过其车辆被动安全的承受能力范围,进而造成人员伤亡,能用钱解决的都不是问题。
其次进入L3之后,驾驶者无法发出任何驾驶指令,与辅助驾驶体系完全隔绝,保证不会出现驾驶者错误干预影响安全,于是人车责任模糊不清难以划分的情况。
领航辅助的应用和成熟,一方面——在做好了风险提示和使用规范的前提下——当然有效提升了驾驶舒适性和安全性;另一方面,随着覆盖范围的扩大、接管请求的减少,让很多过去绝无可能的小概率情况有了可能性。
在过去,任何一位驾驶员只需适度的自主驾驶,便可以保持基本驾驶技能不丢失。而未来更精进、更成熟、能力更强的NOA,可能会让驾驶者在不知不觉中丢失或显著降低其手动驾驶与处理突发意外的能力。
那么对于那些NOA确实极为优秀的车企,或许应该考虑一定的“反沉迷”措施:如果能确认驾驶员已连续使用辅助驾驶很长时间(比如上万公里)且一直未出现手动接管的极端情况下,强制该驾驶员必须手动驾驶一定时间/里程。
当然,这并不是一个有关具体细节的建议。一方面眼下讨论实现细节也许还为时尚早,另一方面也存在着许多现实问题,像是如何区分不同驾驶员是否涉及隐私问题、如何得知驾驶者是否曾驾驶其他车辆等等。
完美防止任何一位驾驶者因智能辅助驾驶系统越来越低的接管率而“忘记”如何手动驾驶车辆,也许现在看来既有点杞人忧天,也存在很多操作细节上的难题,但我们至少可以肯定这个方向并强化认知:
在真正实现全自动驾驶之前,不应坐视任何智能辅助驾驶削弱人类驾驶者手动接管能力的可能性不管。自动系统在带来安全的同时,也可能因过度依赖而带来新的危险,这种隐患伴随人类已久,需要被注意到
-
自动化
+关注
关注
29文章
5671浏览量
79985 -
智能驾驶
+关注
关注
3文章
2635浏览量
49051 -
自动驾驶
+关注
关注
786文章
13977浏览量
167555
原文标题:智能驾驶该考虑“防沉迷”了?
文章出处:【微信号:autocarweekly,微信公众号:autocarweekly】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
智能座舱与智能驾驶技术演进分析

从特斯拉看智能驾驶未来发展
智能驾驶对交通安全的影响
如何选择智能驾驶辅助系统
智能驾驶技术发展趋势
比亚迪与华为合作,加快智能驾驶领域深度融合
广汽丰田携手Momenta推出端到端全场景智能驾驶方案
华为智能驾驶:领跑全球的智能驾驶新纪元
小米SU7智能驾驶激活率超80%
智能驾驶基本概念定义 中国智能驾驶格局分析






 工商网监
工商网监
评论