 伺服电机是如何构造的?及伺服电机的工作原理
伺服电机是如何构造的?及伺服电机的工作原理

伺服电机的构造
伺服电机是直流电机,具有以下5个部分:
1.定子绕组:这种类型的绕组绕在电机的固定部分。它也被称为电机的励磁绕组。
2.转子绕组:这种类型的绕组绕在电机的旋转部分。它也被称为电机的电枢绕组。
3.轴承:有两种类型,即字体轴承和背面轴承,用于轴的运动。
4.轴:电枢绕组耦合在铁杆上称为电机的轴。
5.编码器:它具有近似传感器,可确定电机的转速和电机的每分钟转数。
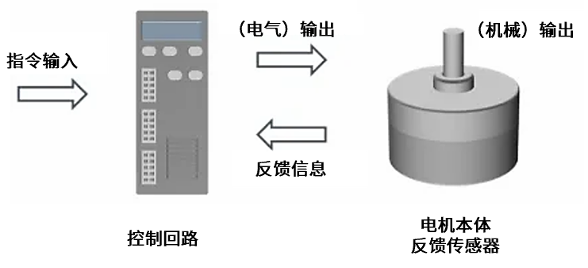
伺服电机机构
它由三种基本类型组成:
1.控制装置
2.输出传感器
3.反馈系统
伺服电机工作在自动闭环系统的现象上。该闭环系统需要控制器。该控制器由比较器和反馈路径组成。它有一个输出和两个输入。在这种情况下,为了产生输出信号,比较器用于比较所需的参考信号,并且该输出信号由传感器感测。电机的输入信号称为反馈信号。根据反馈信号,电机开始工作。比较器信号称为电机的逻辑信号。当逻辑差值较高时,电机将在所需时间内打开,当逻辑差值较低时,电机将在所需时间内关闭。基本上,比较器用于确定电机是ON还是OFF。电机的正常运行可以在良好的控制器的帮助下完成。
伺服电机控制:
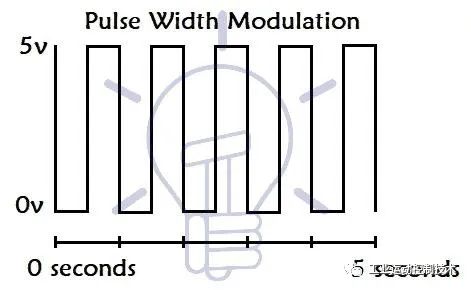
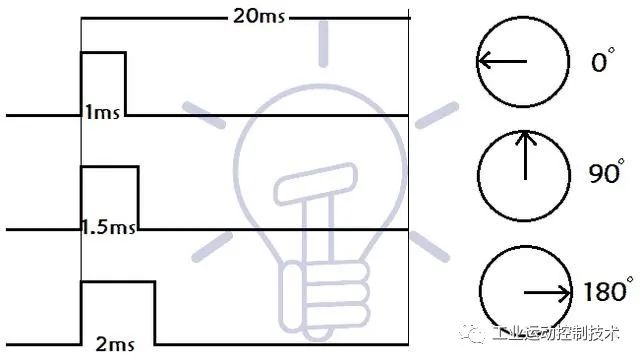
伺服电机可以通过PWM方法控制,即脉宽调制。它们向电机发送宽度不一致的电信号。宽度脉冲在1毫秒至2毫秒的范围内变化,并在一秒钟内重复50次将其传输到伺服电机。脉冲的宽度控制旋转轴的角位置。其中,使用了三个术语来表示伺服电机的控制,即最大脉冲,最小脉冲和重复率。
例如,舵机以1毫秒的脉冲移动,使电机向0°转动,而以2毫秒的脉冲将电机向180°转动,在角位置之间,脉冲宽度自行互换。因此,伺服以宽度为90.1毫秒的脉冲转向5°。
每个伺服电机中都有三根电线或引线。两根线使用正电源和接地电源,而第三根线用于控制信号。
伺服电机的工作原理
伺服具有位置传感器,直流电动机,齿轮系统,控制电路。从电池获取电力时,直流电机以高速和低扭矩运行。该速度较低,扭矩将高于连接到直流电机的齿轮和轴组件。轴的位置由位置传感器从其确定位置进行感应,并向控制电路提供信息。信号由位置传感器的控制电路解码,并处理旋转方向以获得正确的位置。它需要4.8 V至6 V的直流电源。
减速齿轮箱连接到一个轴上,该轴会降低电机的转速。减速齿轮箱的输出轴与与编码器或电位器连接的电机相同。然后将编码器的输出连接到控制电路。伺服电机的电线也连接到控制电路。电机通过微控制器通过PWM的形式发送信号进行控制,PWM解码控制电路以所需角度旋转电机,控制电路沿顺时针或逆时针方向移动电机,这样轴也沿所需方向旋转。编码器将反馈信号发送到控制电路。当电机达到所需角度时,控制电路会根据从编码器接收的信号相应地停止电机。
例如,如果电机处于30°,并且微控制器为电机提供60°的角度,则控制电路沿顺时针方向旋转电机。当电机达到60°时,编码器向控制电路发送信号以停止电机。
-
电机
+关注
关注
145文章
9743浏览量
155024 -
伺服电机
+关注
关注
88文章
2210浏览量
61658 -
电枢
+关注
关注
0文章
26浏览量
8066
发布评论请先 登录
行星齿轮减速机如何匹配伺服电机转速?

大功率异步电机和伺服电机的优缺点
伺服电机和伺服减速机如何配选的
PLC怎么控制多台交流伺服电机达到同步工作


伺服电机增益详解
伺服电机的控制方式简述

派克Parker防爆伺服电机与普通伺服电机的区别

步进伺服电机的六大问题处理技巧

三菱伺服电机抖动声响的调整
舵机与伺服电机的区别是什么?
伺服电机中的回原点方式

什么是伺服电机编码器?作用/关键技术/选型等一起看看吧!




评论