 基于C-V2X的车路协同自动驾驶关键技术与应用
基于C-V2X的车路协同自动驾驶关键技术与应用
随着车联网技术的演进,自动驾驶在单车智能的基础上,又有了新的发展形态——车路协同自动驾驶。通过“人-车-路-云”深度融合形成的一体化复杂信息物理系统(cyber physical system,CPS),可以与自动驾驶车辆实现协同感知、协同决策规划甚至协同控制,提升自动驾驶安全性,帮助克服各类复杂交通环境。首先介绍了车路协同的复杂信息物理系统的概念内涵和总体架构,并提出了车路协同自动驾驶的一系列典型应用场景、技术原理、C-V2X(cellular vehicle-to-everything)性能要求、车路协同系统功能与性能要求,可以为下一阶段智能网联汽车与智能交通的深度融合发展提供参考和解决思路。
0 引言
车联网(V2X)无线通信技术是实现车辆与周围的车、人、交通基础设施和云(平台)等全方位连接和信息通信的新一代信息通信技术,而蜂窝车联网(cellular vehicle-to-everything,C-V2X)则是由我国在国际上首先提出的一种车联网无线通信技术,它融合了蜂窝移动通信和直连通信两种模式,包括基于4G LTE 的LTE-V2X 和基于5G新空口(new radio,NR)的NR-V2X 两个发展阶段。
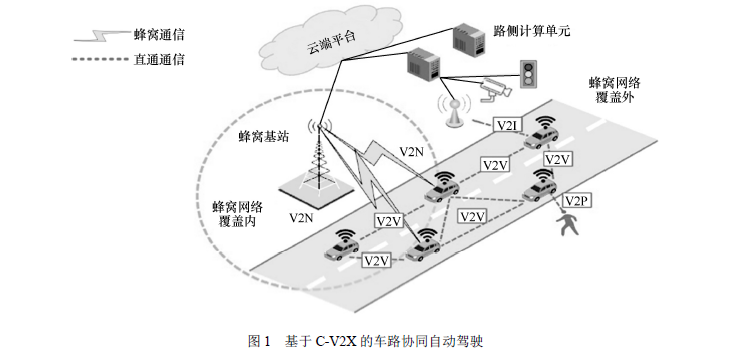
C-V2X 是实现自动驾驶的关键支撑,在自动驾驶领域,已经将基于C-V2X 的自动驾驶方案上升为自动驾驶的另一条技术路线,即车路协同自动驾驶(vehicle infrastructure cooperative autonomousdriving,VICAD)。基于C-V2X 的车路协同自动驾驶如图1 所示,VICAD 的核心是通过C-V2X,将“人-车-路-云”交通要素有机地联系在一起,实现车与车(V2V)、车与道路(V2I,主要指道路各类系统和设备设施,如感知设施、气象检测器、状态监测设备、交通诱导与控制设施等)、车与云(V2N,包括地图平台、交管平台、出行服务平台等)和车与人(V2P)等的全方位协同配合(如协同感知、协同决策规划、协同控制等),从而满足不同等级自动驾驶车辆应用需求(如驾驶辅助、辅助驾驶或高等级自动驾驶),实现自动驾驶单车最优化和交通全局最优化发展目标。
世界各国都高度重视与VICAD 相关技术的研究和产业应用。美国2004 年就启动了车路集成(vehicle-infrastructure integration,VII)系统研究计划,并连续发布了《自动驾驶车辆综合计划》(Automated Vehicles Comprehensive Plan)、《智能交通系统战略计划》(ITS Strategic Plan)等一系列纲领性文件,并主导了智能驾驶(IntelliDrive)项目、网联自动驾驶(Connected Vehicle Pilot)项目、协同式驾驶出行应用(Cooperative AutomationResearch Mobility Applications,CARMA)研究项目等一系列研究和验证示范项目;欧洲也在ITS-G5、4G/5G 通信技术的基础上,发布了《网联自动驾驶路线图》(Connected Automated DrivingRoadmap ) 、《合作智能交通系统和服务》(Cooperative Intelligent Transport Systems and Services)、《互联、合作和自动移动》(Cooperative,Connected and Automated Mobility,CCAM)等顶层设计规划,并在欧洲地平线计划(HorizonEurope)总体框架下,主导开展了大量的研究测试和建设部署项目,如eSafety、CVIS、Drive C2X、CAR2CAR 和C-ROADS 等;日本早在2006 年就启动了下一代“Smartway 计划”,通过整合ITS的各种功能,建立全国性的车载集成平台,为车辆提供ETC、DSSS、ASV 等服务,2017 年9 月,日本东京发布最新一版城市总体规划《都市营造的宏伟设计—东京2040》,推进“新东京”实现3 个愿景:“安全城市”“多彩城市”和“智慧城市”。
中国积极推动VICAD 技术和产业发展,从顶层设计、战略布局、行业应用等层面进行系统性推进,目前总体处于全球领先水平。在技术路线与政策体系方面,“单车智能+网联赋能”自动驾驶技术路线已成为广泛共识,政府主管部门积极加强顶层规范设计,营造产业发展的良好环境,出台了一系列政策文件,包括《扩大内需战略规划纲要(2022—2035 年)》《智能汽车创新发展战略》《新能源汽车产业发展规划(2021—2035)》《交通强国建设纲要》《交通领域科技创新中长期发展规划纲要(2021—2035 年)》等,为车路协同自动驾驶发展指明了方向;各地政府部门结合自身发展需求和优势,发布了积极推进产业发展的一系列指导意见和发展计划,大力发展车路协同技术,推动产业应用。在技术验证和应用示范方面,工业和信息化部牵头先后批准建设了江苏(无锡)、天津(西青)、湖南(长沙)、重庆(两江新区)等国家级车联网先导区,北京、上海、广州、深圳等地也大力支持开展车联网示范区建设和“双智”试点(智慧城市基础设施与智能网联汽车协同发展试点),加快车路协同基础设施规模建设部署,IMT-2020(5G)推进组、中国智能网联汽车产业创新联盟(CAICV)等组织也先后开展了C-V2X“三跨”“四跨”“新四跨”系列大规模先导应用示范活动,逐步推动VICAD 从封闭开发走向互联互通和大规模应用。
然而,VICAD 是一个高度复杂的系统工程,目前整体还处在发展的初级阶段。为进一步推动自动驾驶技术成熟,并实现规模化应用,需要针对VICAD 进一步开展系统性研究,明确VICAD 发展阶段、应用场景、车路协同系统技术要求和测试方法等内容,为VICAD 发展提供参考和指引。
1 车路协同自动驾驶系统总体设计
1.1 系统总体架构
VICAD 的本质是给每辆车开了一个“天眼”,它不仅能帮助车辆在“完美”视角下保障安全,还能高效分配道路时空资源,让所有交通要素“各行其道”“各得其所”。将支持VICAD 应用场景所需的全部要素所组成的新型复杂系统称为车路协同系统(vehicle infrastructure cooperative system,VICS),VICS 模型如图2 所示。
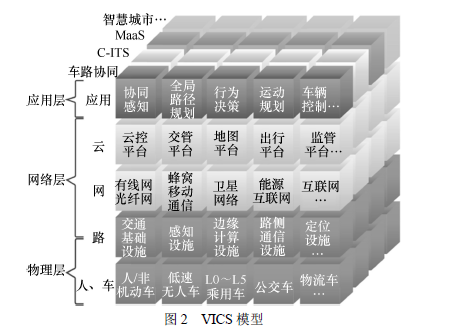
VICS 中的交通参与者、交通运输工具、交通基础设施和交通环境不再只被看作一个简单的对象,人、车、路和环境所对应的交通要素通过传感器的采集和融合处理,成为具有自主身份且具备信息交互功能的数字孪生体。物理实体和数字孪生体之间可以通过有效信息流和决策控制流完成信息传递和决策控制闭环,例如车辆的远程操控、道路红绿灯的优化控制、道路可变标识控制等;不同物理实体之间,在车路协同这个复杂信息物理系统的全局调度下,呈现更加高效、更加秩序化的交通运行态势。
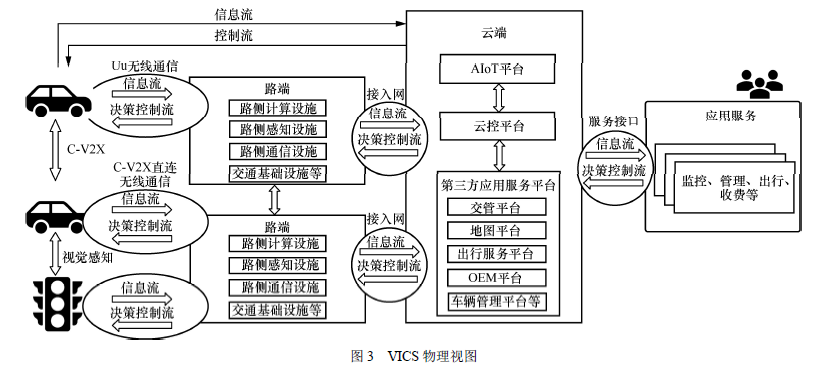
参考CPS 系统架构以及美国合作式智能交通系统参考架构设计(architecture reference for cooperative and intelligent transportation,ARC-IT),在VICS 模型的基础上,可以得到VICS 的总体架构,包括物理视图、通信视图、功能视图、产业视图共4 个视图,其中VICS 物理视图如图2 所示,包括3 个主要部分。
(1)车端子系统(vehicle):由车载单元(onboard unit,OBU)、车载计算控制模块、车载网关和路由器等组成。
(2)路端子系统(infrastructure):包括路侧通信设施、路侧感知设施、路侧计算设施等,也包括用于交通安全、交通管理、通信与定位的各类设备设施。
(3)云端子系统(cloud):包括云控平台和相关第三方应用服务平台,提供中心解密、中心交换、服务组件节点、服务路由器和中心接入节点等服务,具备网络管理、业务支撑和服务等能力。
需要说明的是,VICS 中的“V”是vehicle,包括不同网联等级和自动化程度的车辆,“I”是infrastructure,一般代指路端智能基础设施及环境,包括但不限于:
● 道路工程及配套附属设施(路面、道路标志标识、红绿灯、照明、供电等设施);
● 智能感知设施(摄像头、毫米波雷达、激光雷达等);
● 车路通信设施(直连无线通信设施、蜂窝移动通信设施);
● 计算控制设施(路侧边缘计算节点、多接入边缘云或各级云服务平台);
● 高精度地图与辅助定位设施;
● 其他配套附属设备设施(如供能、照明设施);
● 道路上承载的各类人员(如行人、施工人员、非机动车驾驶员等)。
1.2 系统功能与性能要求
VICS 的技术要求主要体现在C-V2X 通信能力、感知定位能力(含地图更新能力)、决策控制能力3 个方面。根据感知融合能力与应用服务对象不同,VICS 的路端子系统分为3 类。
(1)I 类路端子系统:可服务于具备0 级和1 级驾驶自动化能力的智能网联汽车,符合该等级的路端子系统应可支撑相应的数据统计与平台管控类应用。
(2)Ⅱ类路端子系统:可服务于具备2 级和3 级驾驶自动化能力的智能网联汽车,符合该等级的路端子系统可向驾驶员提供实时道路信息、辅助驾驶员进行现场决断类的应用。
(3)Ⅲ类路端子系统:可服务于具备4 级及以上驾驶自动化能力的智能网联汽车,符合该等级的路端子系统应可为自动驾驶系统提供有价值的实时道路信息,支撑自动驾驶系统进行决策类的应用。
下面重点对Ⅲ类路端子系统的相关能力进行介绍。
(1)C-V2X 通信能力
综合来看,与行业已经发布的面向辅助驾驶的T/CSAE 53、T/CSAE 157 相关标准相比,面向高等级自动驾驶的车路协同应用场景对C-V2X 通信具有更高的要求,具体如下。
● 在移动速度方面,系统应能够支持最高相对速度为500 km/h 的车辆间发送消息,以及绝对速度为250 km/h 的车辆与车辆、车辆与路侧单元、车辆与行人发送消息。
● 在通信时延方面,对于支持车车和车人通信的终端,无论是直接发送还是由路侧单元转发,最大通信时延应不超过100 ms。对于特殊用例(如碰撞感知),车联网终端间发送V2V 消息的最大时延宜不超过20 ms。对于车到路侧单元的最大通信时延不超过100 ms。
● 在消息发送频率方面,系统应能够支持路侧单元和车联网终端不低于10 Hz 的消息发送频率。
● 在消息大小方面,不包括与安全相关的消息单元,对于周期性消息,两个支持V2X应用的用户设备之间传输的消息大小在50~300 byte;对于事件触发的消息,其消息最大为1 200 byte。
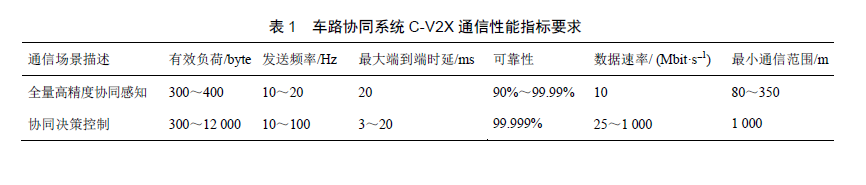
随着网联车辆的增多,未来对通信能力的要求将进一步增强。车路协同系统C-V2X 通信性能指标要求见表1,针对协同感知类场景和协同决策控制类场景,其中最小端到端时延要求为3 ms,可靠性最高为99.999%,直通链路数据速率最大为1 Gbit/s,上行数据速率最大为25 Mbit/s,负荷最大为12 000 byte,通信范围最大为1 000 m。
(2)感知定位能力
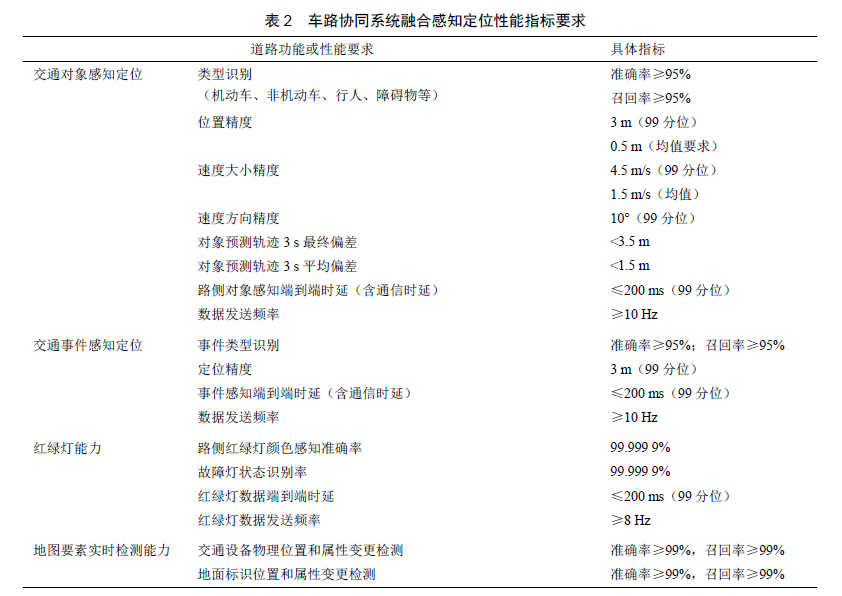
VICS Ⅲ类路端子系统的感知定位能力应与L3 及以上等级自动驾驶车辆对感知定位的要求相匹配,车路协同系统融合感知定位性能指标要求见表2。
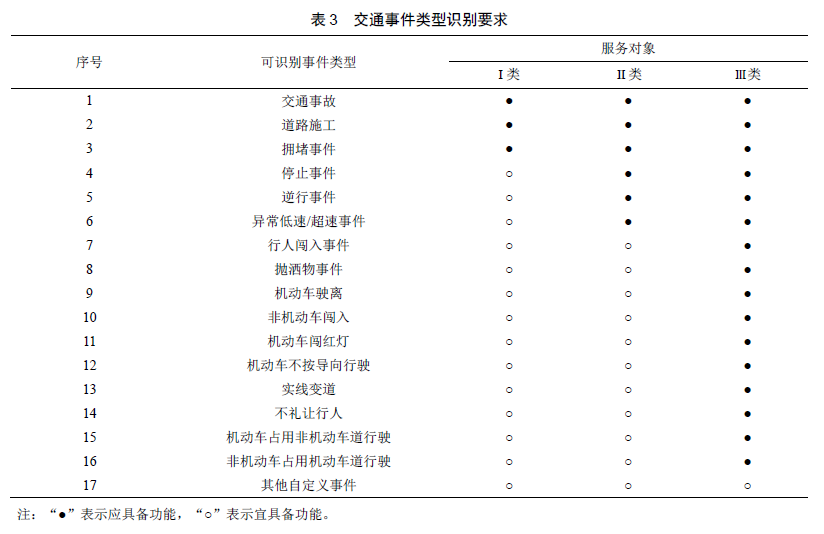
交通事件类型识别要求见表3,包括可支持识别的交通事件。
(3)决策控制能力
协同决策控制类场景需要VICS 具备相应的轨迹预测能力、决策规划能力和控制能力,这就要求在路侧同时部署一套与车端智能驾驶系统(包括车载OS 与车控OS)适配兼容的路侧智能驾驶系统(路侧OS),且路侧OS 需要更具开放兼容性,为不同类型、不同等级的车辆提供协同驾驶服务,限于篇幅,本文暂不列出具体指标。
2 车路协同自动驾驶典型应用场景与比较分析
2.1 应用场景分类
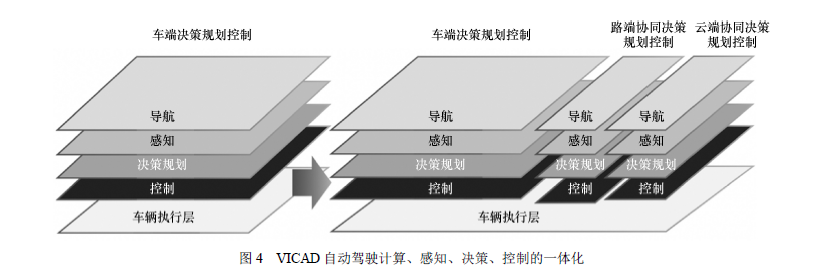
VICAD 最核心的特征是自动驾驶计算、感知、决策、控制的一体化,如图4 所示,在VICAD 模式下,车辆、路端或云端都可能承担部分或全部“感知-决策-规划-控制-执行”功能,基于车路云一体化计算和互联,实现一体化感知、一体化决策规划和一体化控制,其中一体化计算和互联是关键基础,一体化感知与决策控制是核心应用。
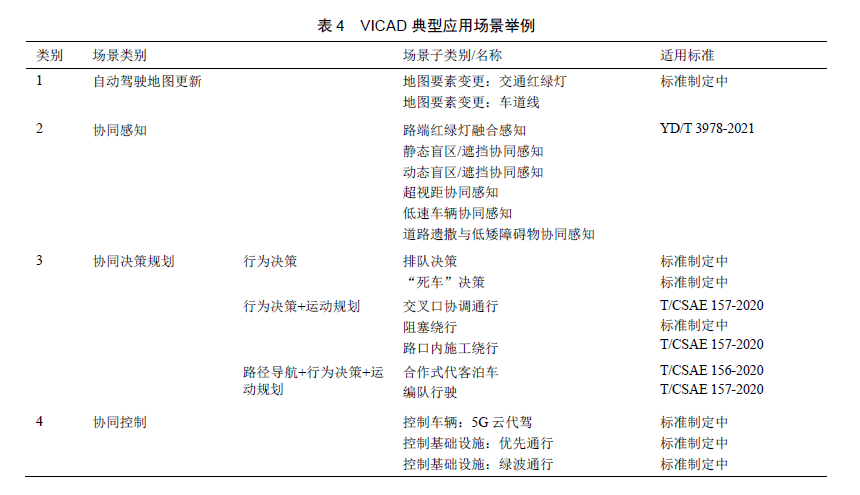
参考已经发布的车路协同应用场景相关标准,国内标准例如T/CSAE 53、T/CSAE 156、T/CSAE 157、T/CSAE 158,国外标准例如SAEJ2735、3GPP TS22.186、TR22.886,本文将VICAD应用场景分为自动驾驶地图更新、协同感知、协同决策规划与协同控制4 个大类18 个小类,VICAD 典型应用场景举例见表4。
2.2 自动驾驶地图实时更新类应用场景
2.2.1 总体原理
自动驾驶地图(业界也称为“高精度地图”或“高清地图”)是自动驾驶的关键支撑要素之一,现阶段自动驾驶地图比较常用的制图以及更新的方式有两种,一种是利用专业测绘设备进行集中数据采集后制图及更新,另一种是利用车载传感器进行众包数据采集后制图及更新。这两种制图和更新方式基本满足高等级自动驾驶的需求,但在地图更新维护方面,存在难以解决的问题,具体如下。
(1)通过专业的高精度测绘设备更新:这种方式一般有人工制图参与,所以可以对全要素的地图进行更新。但这种方式需要专业的采集设备,成本高、数量少,对于大范围地图的采集和制作更新成本高、周期长,难以满足自动驾驶对地图实时更新的需求。
(2)众包地图更新:是指依赖量产车车端搭载的智能摄像头或高级辅助驾驶系统的实时感知和定位能力,对交通环境进行不定期的重复扫描,云端通过收集的采集数据在线成图,并与底图进行差分,从而实现更新。众包更新难以完全支撑高精度地图的实时更新,主要原因如下。
● 在“车辆首次通过的天花板”,即现实道路变化后车辆首次经过时的地图失效问题。
● 产车车端算力、定位精度有限,需要采用一段时间内的多次采集信息进行聚合生成高置信度结果,然后进行地图更新。
● 端传感器数据上传至云端进行建图工作,过程中需要占用较大的通信资源,数据流量费用较高,另外传感器原始数据的公共网络传输会对国家地理信息安全造成重大隐患。
高等级自动驾驶对自动驾驶地图实时更新存在迫切需求,因为车辆在行驶过程中周围环境是动态变化的,比如道路结构(封路、新建道路)、道路附属设施(道路标志标线、标志牌、交通红绿灯等)或交通运行状况(交通管制、道路施工等),会造成车端地图与现实交通环境存在不一致,影响自动驾驶的正常运行。
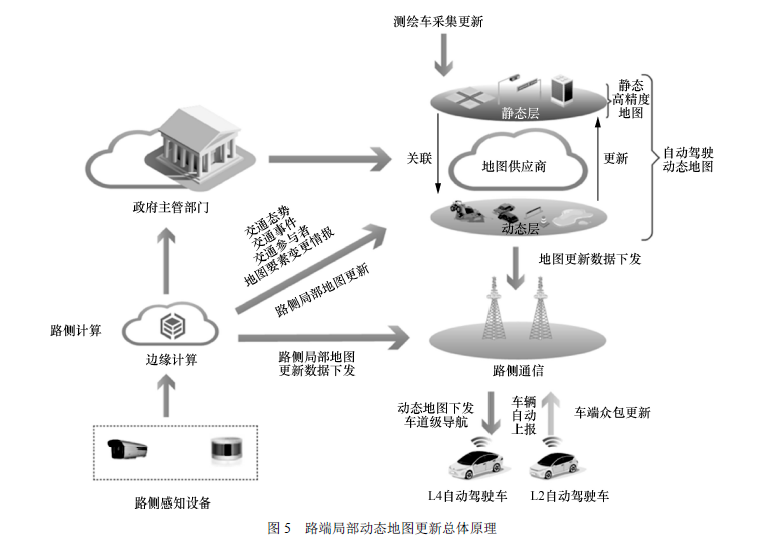
路端局部动态地图更新总体原理如图5 所示,通过路端设施进行高频率的定点观测,实时发现动静态地图要素的变更情况,并更新覆盖范围内的地图,发送给车端和图商,与当前使用的地图版本进行要素级的融合更新。相较于专业测绘地图更新和车端众包地图更新方式,路端局部动态地图更新有如下优势(3 种地图更新方式比较见表5)。

● 点观测数据精度高、可靠性强:路端传感器在安装部署时,可通过精确的内外参标定以及多传感器融合感知定位,实现厘米级位置精度检测。同时对于需要周期性观测获取的经验类型的地图数据,路侧作为定点连续观测单元,更具有优势。
● 时性强:利用路端毫秒级感知以及分钟级地图制作,为地图分钟级更新提供了保障支持,与传统更新相比,具有明显优势。
● 识别的地图动静态要素信息丰富:路端不仅可以识别重要的静态和半静态地图要素信息,还可以识别半动态、动态的地图要素信息。
2.2.2 车智能自动驾驶比较分析
下面以常见的红绿灯变更和车道线变更为例进行说明。通过对多个智能网联示范区的长期观测统计,可知自动驾驶车辆在实际道路行驶时,会有较高概率遇到道路现实变更场景(例如道路红绿灯、车道线、标志标牌等),遭遇道路现实变更的次数 约为6.38 次/万千米(其中红绿灯变更次数为5.5 次/万千米,车道线变更次数为0.78 次/万千米,其他为0.1 次/万千米),这类场景会直接影响自动驾驶车辆的安全运营,需要通过有效手段快速解决。下面对车端众包地图更新和路端局部动态地图更新两种典型地图更新模式进行比较分析。
约为6.38 次/万千米(其中红绿灯变更次数为5.5 次/万千米,车道线变更次数为0.78 次/万千米,其他为0.1 次/万千米),这类场景会直接影响自动驾驶车辆的安全运营,需要通过有效手段快速解决。下面对车端众包地图更新和路端局部动态地图更新两种典型地图更新模式进行比较分析。
(1)车端众包地图更新模式
在车端众包地图更新模式下,地图完成现实变更的更新时间 ,由于需要积累多趟、多车道数据才能完整重建,一般需要天级别(≥24 h)的数据积累,云端才能完成地图的更新下发,因此在众包地图更新模式下可定义地图更新周期
,由于需要积累多趟、多车道数据才能完整重建,一般需要天级别(≥24 h)的数据积累,云端才能完成地图的更新下发,因此在众包地图更新模式下可定义地图更新周期 ,假设自动驾驶车辆每天的运营时间
,假设自动驾驶车辆每天的运营时间 。
。
那么,该模式下遭遇地图要素变更场景的概率通过长时间的运营观测可以从两个层面得出:
单车每万千米里程遭遇该场景的概率: =6.38次/万千米 ,单车每天遭遇该场景的概率:
=6.38次/万千米 ,单车每天遭遇该场景的概率: =1.7次/ (车·天)。
=1.7次/ (车·天)。
该模式下车辆遭遇地图要素变更场景的通过成功率仅依赖于单车的能力,定义地图要素变更场景通过成功率为 ,
, 变更的具体值应结合车辆的实际能力,并由大量实测结果确定。
变更的具体值应结合车辆的实际能力,并由大量实测结果确定。
(2)路端局部动态地图更新模式
依靠路端感知优势,道路交通要素在变更完成后,可在云端短时间内完成地图重建和车端更新,将总的更新时间定义为 ,保守按5 min计算,那么
,保守按5 min计算,那么 。
。
同时,假设通过车路协同感知实现地图更新的场景召回率 。
。
那么该地图更新模式下自动驾驶车辆遇到变更场景的遭遇率 为:
为:

其中:

该地图更新模式下自动驾驶车辆场景遭遇概率 为:
为:

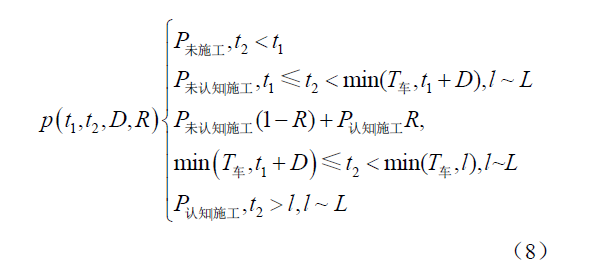
场景成功率方面,运营时间内发生一次地图要素现实变更时,若地图要素变更场景发生在 时刻,有车辆在
时刻,有车辆在 时刻途经该点,则在
时刻途经该点,则在 至
至 时间窗口内,车辆受到场景的环境影响,通过成功率
时间窗口内,车辆受到场景的环境影响,通过成功率 ,在时间窗口前,车辆通过成功率为
,在时间窗口前,车辆通过成功率为 ,时间窗口后车辆若完成更新,成功率恢复为
,时间窗口后车辆若完成更新,成功率恢复为 ,那么:
,那么:
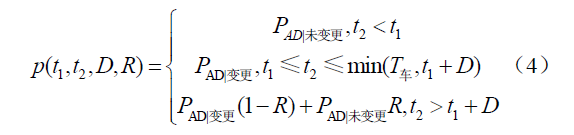
引入路端局部动态地图更新后的场景通过率:
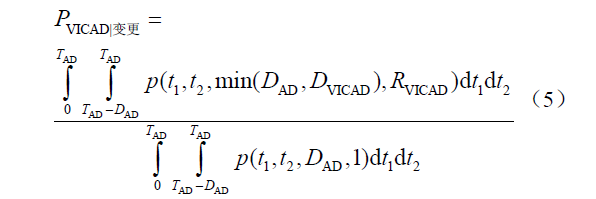
由于 ,可得:
,可得:
根据自动驾驶车辆的测量和运营数据,可以进一步计算得出以下几点。
● 假设AD 模式下地图要素变更场景通过成功率 ,路端局部动态地图更新模式下变更场景召回率
,路端局部动态地图更新模式下变更场景召回率 ,可得
,可得 。
。
● 假设AD 模式下地图要素变更场景通过成功率 ,路端局部动态地图更新模式下变更场景召回率
,路端局部动态地图更新模式下变更场景召回率 ,可得
,可得 。
。
(3)收益评估分析
综上所述,路端局部地图更新模式具有显著收益,地图要素变更场景下VICAD 收益分析见表6,具体如下。
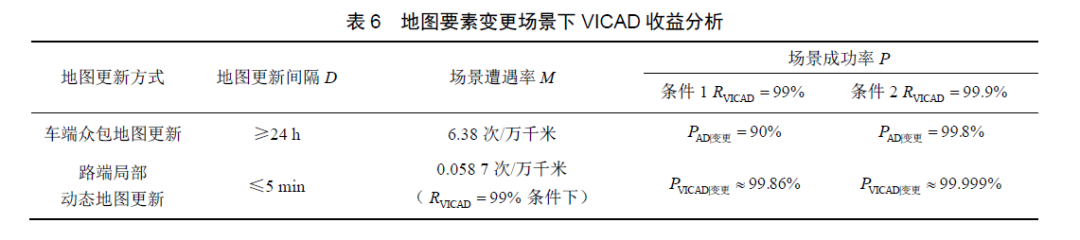
● 地图更新时间方面: 小于或等于5 min时,地图更新时间大幅缩短。
小于或等于5 min时,地图更新时间大幅缩短。
● 地图要素变更场景的遭遇概率明显降低: 的情况下,场景遭遇率可从6.38 次/万千米降低至0.058 7 次/万千米。
的情况下,场景遭遇率可从6.38 次/万千米降低至0.058 7 次/万千米。
● 场景通过成功率 得到显著提升:在
得到显著提升:在 、
、 的情况下,
的情况下, 变更甚至可达到理想的99.999%,场景的失败率从1.26 次/百万千米降低到0.006 3 次/百万千米。
变更甚至可达到理想的99.999%,场景的失败率从1.26 次/百万千米降低到0.006 3 次/百万千米。
2.3 协同感知类应用场景
2.3.1 总体原理
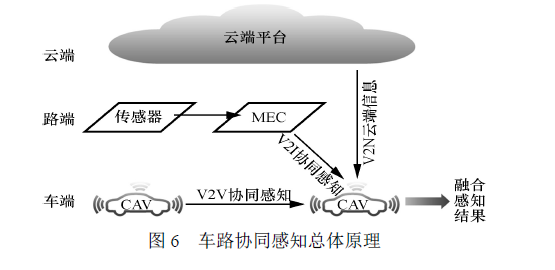
单车智能自动驾驶车辆(autonomous vehicle,AV)受限于传感器的感知距离、感知角度、感知时长等因素,较难对动静态盲区/遮挡、超视距等场景的交通参与者进行准确识别、定位和预测。通过路侧多传感器部署和路侧融合感知定位,可实现多方位、长距离连续检测识别,并利用V2X技术将路侧感知结果共享发送到网联自动驾驶车辆(connected autonomous vehicle,CAV),与主车感知进行融合,辅助自动驾驶车辆对盲区和超视距范围内车辆或行人的准确感知识别,CAV 车辆可提前做出预判和决策控制,避免急刹或出现交通事故。车路协同感知总体原理如图6 所示。
2.3.2 红绿灯场景举例
根据感知对象的差异,可以将协同感知类应用场景分为交通参与者协同感知、交通事件协同感知和红绿灯协同感知3 类,其中交通参与者协同感知与交通事件协同感知可参见T/CSAE 53 和T/CSAE 157 标准,红绿灯协同感知场景中,单车智能主要通过视觉智能获取,但仍存在很多不足:
● 识别红绿灯能力有限,异形红绿灯无法识别;
● 车端视角限制,容易被前车遮挡;
● 容易受外界环境限制,尤其是逆光、雾天、
扬尘、夜晚等环境;
● 识别的数据维度有限,倒计时信息识别不准。
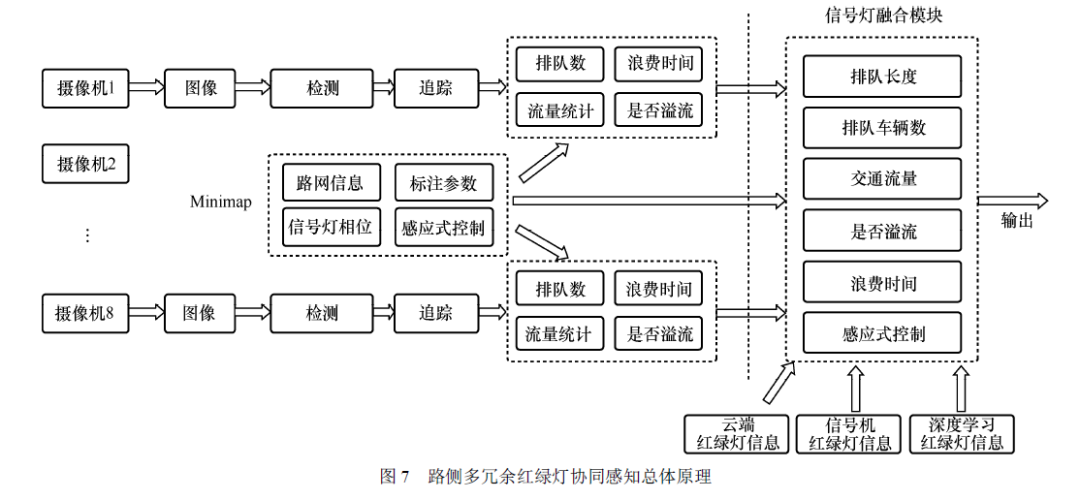
路侧多冗余红绿灯协同感知总体原理如图7所示,主要通过物联网红绿灯数据接入、路侧多视觉融合感知等技术获取红绿灯灯色和倒计时信息,经数据融合处理后,通过车路协同技术发给自动驾驶车辆。车路协同自动驾驶红绿灯协同感知的优势:
● 获取方式不受灯的外观、环境影响;
● 获取到的数据内容丰富(包括灯色、倒计时);
● 车辆可在很远的距离提前获取信息,提前进行决策控制。
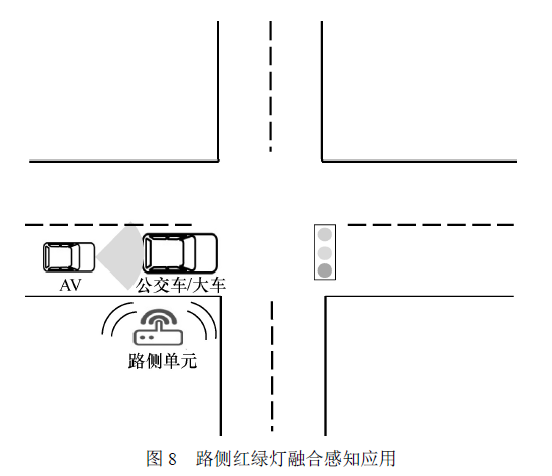
以路口前方大车遮挡红绿灯场景为例,可通过车路协同自动驾驶红绿灯协同感知实时获取准确的路口红绿灯灯色和倒计时数据,并通过V2X将红绿灯数据发送给路口所有车辆,以便车辆提前做出预判和决策控制,避免出现闯红灯或者急刹。路侧红绿灯融合感知应用如图8 所示。
2.4 车路协同决策控制类应用
2.4.1 车路协同决策规划
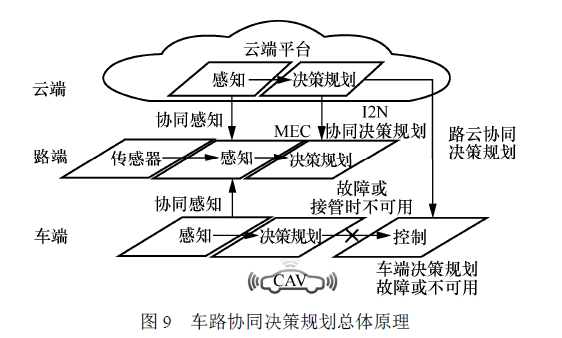
在车路协同感知的基础上,路侧设施或系统还可以具备协同决策规划能力,进一步保障自动驾驶安全,提高交通通行效率。车路协同决策规划总体原理如图9 所示,当车端决策规划能力不可用时,由路端或云端为自动驾驶车辆提供决策规划服务。
根据自动驾驶系统总体架构,车路协同决策规划可以分为协同路径规划(routing)、协同行为决策(decision)和协同运动规划(planning)3 个子过程。
下面以道路施工阻塞接管场景为例展开进行介绍。道路施工、交通事故、交通管制等交通事件是自动驾驶车辆经常遇到且较难应对的一类场景,尤其是在一些复杂的道路施工(如路口内施工、占据所有行进方向车道的施工)场景中,仅依靠车路协同感知或动态地图更新也不能成功克服,容易造成车辆停滞或接管,存在安全风险。针对施工场景,车路协同具体有动态路径规划、协同行为决策、协同运动规划3 种应对解决方式。
(1)协同路径规划
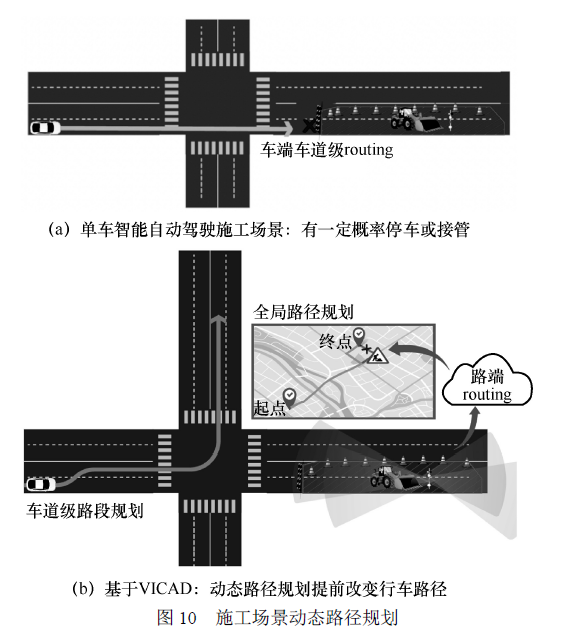
施工场景动态路径规划如图10 所示,路端可以识别施工信息并发送到地图平台,发送的信息包括但不限于事件类型、时间地点、影响范围、影响时间等,通过车路协同路径规划,可以评估车辆的可通过性,若不能通过或难度较大,可重新为车辆规划路径,提前避开施工路段。具体实现流程如下:
① 车辆设置目的地后,路径规划模块根据道路拓扑关系和道路拥堵情况构建全局路径规划,车辆按照路径规划行驶;
② 路端检测到占道施工,同步该信息至云端,通过自动和人工的方式及时更新路网拓扑关系;若判断车辆无法通行,重新对车辆进行全局路径规划,提前绕开施工区域所在路段。
(2)协同行为决策+运动规划
在车路协同路径规划部分,针对施工场景给出了通过提前改变车辆行进路径的解决方式;如果车辆必须保持直行,则需要在车路协同路径规划的基础上,进一步从车路协同决策规划的角度解决施工阻塞问题,具体流程如下。
① 通过车路协同感知,对道路阻塞区域、阻塞原因、阻塞可达性等进行识别,对双向车流进行实时持续性观测,获取阻塞区域周边车流轨迹,结合对道路交通态势的判断,识别本侧道路已经无法通行,但是对侧道路最内侧车道临时变更行驶方向,作为本侧方向的车道。
② 路端发现车道可通行方向和连接关系变更后,更新局部区域的道路拓扑数据。
③ 车辆到达施工区域前,获取新的局部路网拓扑,重新对车辆进行局部路径规划,借用对向道路通过施工区域所在路段,施工场景车路协同决策规划如图11 所示。
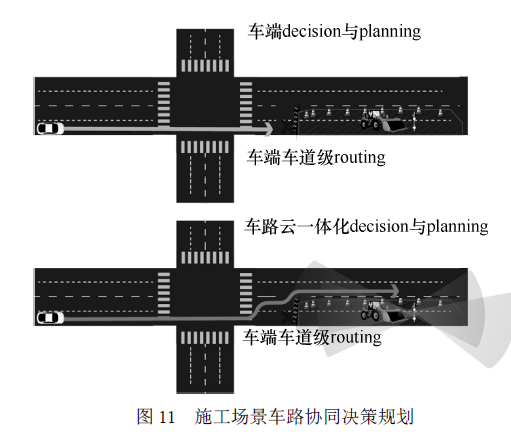
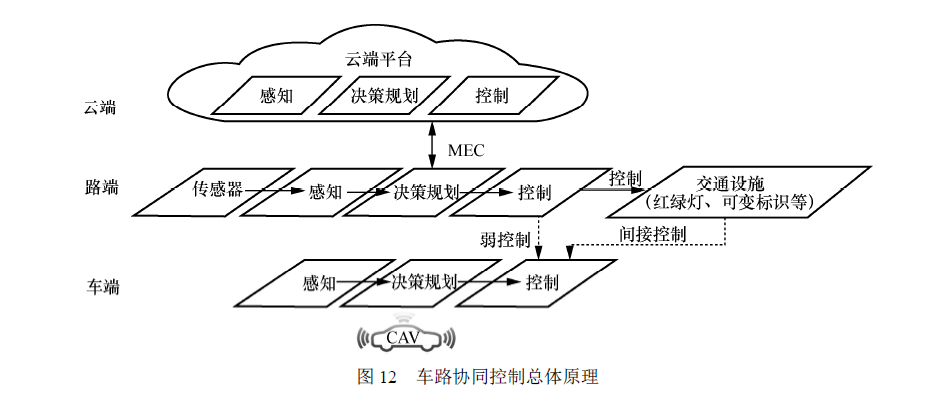
2.4.2 车路协同控制
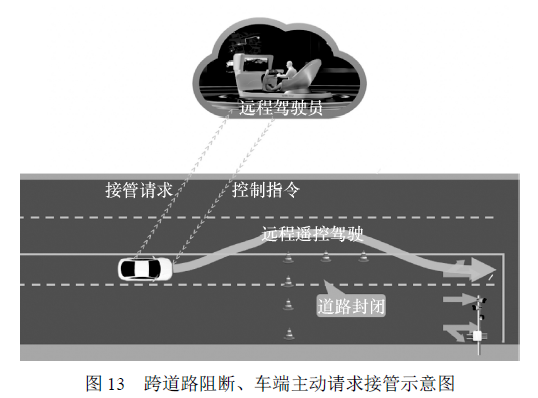
当自动驾驶车辆驶入复杂交通环境、驶出地理围栏、面临复杂认知交互类场景或极端场景时,车辆较难独立应对,还可以通过车路协同控制帮助车辆脱困,车路协同控制总体原理如图12 所示。仍以道路施工接管场景为例,跨道路阻断、车端主动请求接管示意图如图13 所示,车辆阻塞主动请求接管的流程如下:
(1)车端遇道路阻塞,向云端发起接管请求;
(2)云端远程遥控驾驶员接到车辆的脱困或代驾请求;
(3)车端/路端各类实时数据同步上传云端,云端远程遥控驾驶员通过信息显示屏上的信息进行人工决策;
(4)远程遥控驾驶员控制驾驶舱的方向盘、油门、刹车等,给车端下发控制指令;
(5)车辆执行远程驾驶的控制指令,脱困。
2.4.3 与单车智能自动驾驶比较分析
基于上述道路施工场景案例,下面分别对基于AD的单车决策规划和基于VICAD的车路协同决策规划两种模式进行量化比较分析。
(1)基于AD 的单车决策规划
根据长期实测统计,自动驾驶车辆的施工事件场景遭遇率 为4.5 次/万千米,同时定义,AD 模式下自动驾驶地图更新(场景召回)时长
为4.5 次/万千米,同时定义,AD 模式下自动驾驶地图更新(场景召回)时长 ;自 动 驾 驶 车 辆 每 日 运 营 时 长
;自 动 驾 驶 车 辆 每 日 运 营 时 长 ;单车智能自动驾驶遇该类场景的成功率为
;单车智能自动驾驶遇该类场景的成功率为 (的值可根据实测数据获得)。
(的值可根据实测数据获得)。
(2)基于VICAD 的车路协同决策规划
依靠路端和云端协同感知和协同决策规划,可在较短时间内完成施工事件的精准识别和决策规划,并下发到车端,保守起见,将整个链路的时间定为3 min,那么, = 3min 。3 min 时间周期的情况下,施工事件场景的召回率可做到:
= 3min 。3 min 时间周期的情况下,施工事件场景的召回率可做到: 。
。
车路协同决策规划模式下可以通过多种方式帮助自动驾驶车辆避免遭遇施工事件,比如routing、decision 和planning,那么该模式下施工事件的场景遭遇率为:
场景成功率方面,假设施工时长服从对数正态分布: ,对于运营时间内发生的一次场景,若场景发生在
,对于运营时间内发生的一次场景,若场景发生在 时刻,持续时长分布
时刻,持续时长分布 ,有车辆在
,有车辆在 时刻途径该点,则在
时刻途径该点,则在 至
至 ,
, 时间窗口内,车辆受到场景的环境影响,通过成功率为
时间窗口内,车辆受到场景的环境影响,通过成功率为 ,时间窗口后若施工持续且完成召回,成功率为|
,时间窗口后若施工持续且完成召回,成功率为| ,其余时间车辆通过成功率为:
,其余时间车辆通过成功率为:
引入车路协同决策规划后的场景通过率:
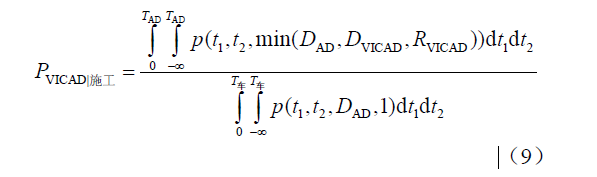
由于 ,可得:
,可得:
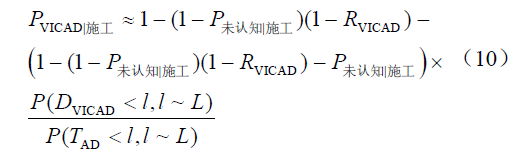
若单车场景通过成功率 ,车路协同决策规划模式下场景召回率
,车路协同决策规划模式下场景召回率 ,可得
,可得 。
。
若单车场景通过成功率 ,边缘计算场景召回率
,边缘计算场景召回率 , 可 得
, 可 得 。
。
(3)收益评估分析:
综上所述,通过车路协同决策规划对自动驾驶具有显著收益,施工场景下VICAD 收益分析见表7,具体如下。
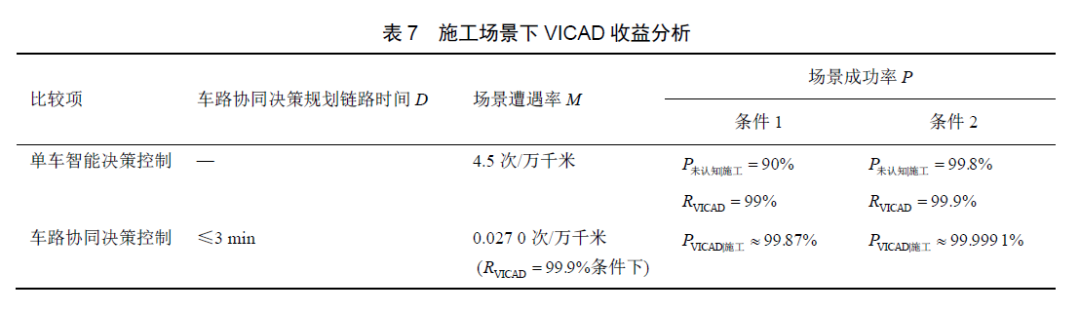
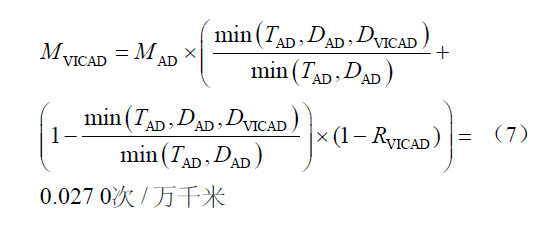
● 车辆场景的遭遇概率明显降低:通过车路协同routing、decision 和planning 等,可以多种方式避免车辆遭遇施工类场景,在 情况下,场景遭遇率可从4.5 次/万千米降低至0.027 0 次/万千米。
情况下,场景遭遇率可从4.5 次/万千米降低至0.027 0 次/万千米。
● 车辆场景通过成功率P 得到显著提升:在 、边缘计算场景召回率
、边缘计算场景召回率 情况下,
情况下, 可达到理想的99.999 1%,场景的失败率从0.9 次/百万千米降低到0.004 05 次/百万千米。
可达到理想的99.999 1%,场景的失败率从0.9 次/百万千米降低到0.004 05 次/百万千米。
3 结束语
本文简述了面向高等级自动驾驶车辆的车路协同应用场景需求,并对车路协同系统进行了系统分析,可以为下一阶段车路协同应用的发展和自动驾驶的规模商业化落地提供参考和解决思路。
但车路协同自动驾驶规模商业化落地是一个循序渐进、由局部到全面逐渐发展的过程:首先,需要实现关键技术的进一步突破,如车路协同系统、车路高效通信(NR-V2X)、云控平台等;其次,智能车辆的渗透率和智能道路覆盖率需要达到一定水平,实现车路协同系统的全面覆盖和广域服务;最后,需要在政策法规和技术标准方面提供足够的保障支持,例如高精度地图与定位、车联网数据安全等方面。
审核编辑:汤梓红
-
车联网
+关注
关注
76文章
2606浏览量
91757 -
自动驾驶
+关注
关注
784文章
13924浏览量
166896 -
智能网联汽车
+关注
关注
9文章
1094浏览量
31136 -
C-V2X
+关注
关注
2文章
113浏览量
13227
原文标题:基于C-V2X 的车路协同自动驾驶关键技术与应用
文章出处:【微信号:阿宝1990,微信公众号:阿宝1990】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐









 工商网监
工商网监
评论