 基于无人机高光谱遥感的荒漠草原覆盖度提取方法研究
基于无人机高光谱遥感的荒漠草原覆盖度提取方法研究
引言
草原生态系统促进经济社会可持续发展、计划到2025年和2035年 草原综合植被盖度要分别达到57%和60%以 上,但目前部分区 域的草原生态系统承受力和抵御干扰的耐受力极度脆弱,有向逐渐 裸露化或荒漠化发展的趋势。草原荒漠化主要表现为植被覆盖度 (FVC)减少和裸地面积增加等,传统的地面小尺度覆盖度采集 受天气、时间和地形地貌的影响较大,且成本高、劳动强度大、费 时费力;而卫星虽然可以大尺度采集覆盖度信息,但是收集速度缓 慢且获得图像的细节水平下降。无人机(UAV)+ 高 光 谱 可 获 得中尺度区域的高空 - 谱分辨率图像,兼顾了效率和精度要求,在 相对较小区域的草地退化监测中将发挥重要作用,正成为传统地面 监测和航空、卫星遥感的优越补充。FVC定义为统计范围内植被冠层的垂直投影面积占土地面积的比例,是研究生态系统平衡、 土 地退化和土壤侵蚀等的关键参数之一,也是评价草地退化和荒漠化的敏感指标。
目前低空UAV 遥感FVC反演法可以分为回归模型法、 混合像元分解法和深度学习法等。UAV高光谱遥感满足了当前遥感朝着高空- 谱分辨率、多时相的发展方向,关键在于能否选择或建立一种适用性强、耗时少、准确性高的覆盖度估算方法。利用光谱分辨率高、光谱波段信息丰富的高光谱成像仪结合低空UAV组建 UAV 高光谱遥感系统,对试验区荒漠草原的高光谱影像进行数据采集和数据预处理,并利用回归模型法、深度学习法ResNet18模型及其改进的3D-ResNet18模型对影像中的植 被和裸土等地物进行分类,并在分类基础上开展基于UAV高光谱遥感信息的荒漠草原FVC计算方法研究。旨在实现利用高光谱遥感系统对荒漠草原从数据获取、数据分析、理论方法及验证等完整流程的尝试,为草原退化评价及治理提供依据,对于草原畜牧养殖和生态环境保护均具有重要的现实意义,符合国家和地区 “助力山水林田湖草沙生命共同体建设 ”的发展需求。
数据采集与分析
2.1 研究区概况
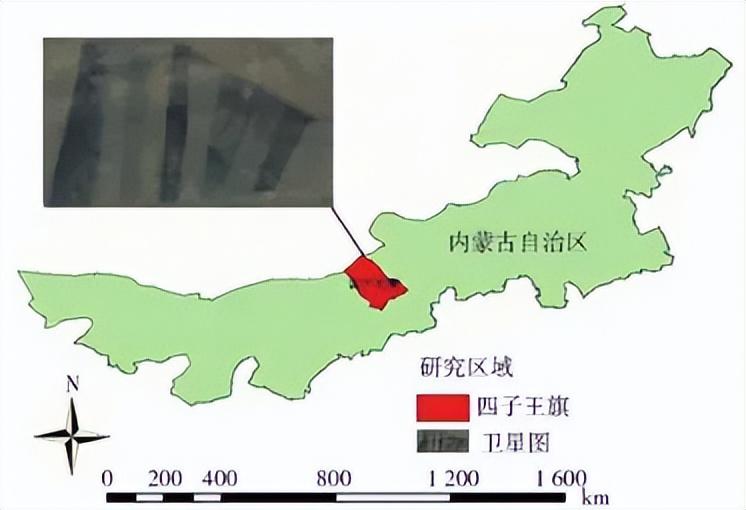
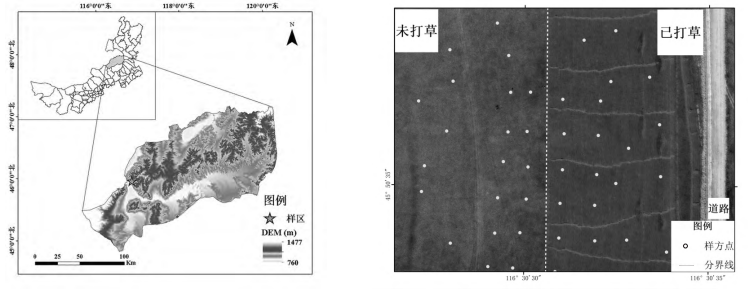
研究区位于乌兰察布市四子王旗格根塔拉草原 (41°47′33″N,111°53′58″E),详 见 图1。
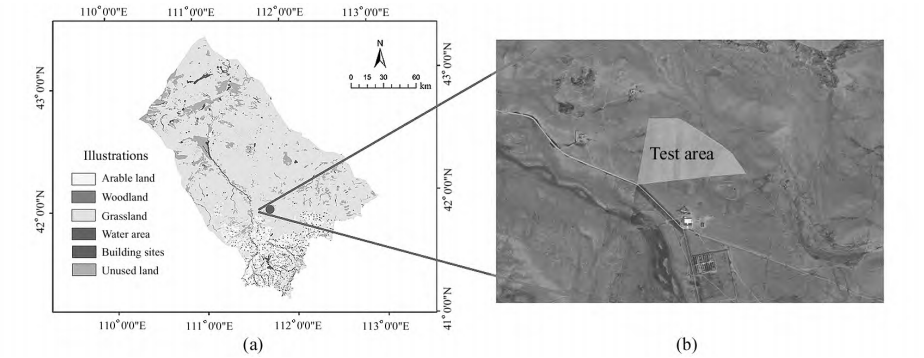
图1 研究区位置图
海拔高度介于1100—1200m之间,降水量稀少,水资源匮乏,具有荒漠草原典型的地域代表性,是典型草原与荒漠的缓冲地带。研究区植被草层稀 疏低矮、交错覆盖、种类匮乏,属短花针茅荒漠草原地带。植被 平均高度为8cm,平均盖度为17%—25%。
2.2 试验设计
2.2.1野外调查及样方布置
野外地面调查包括记录GPS信息、样方编号,实测样方FVC。为了样方框坚固耐用且避免被风刮走,由白色PVC管制作,用 U 型铁丝将其固定于地面上,随机布置1m×1m的样方框60个。FVC 的确定采用照相法。样方冠层照片通过在样方中心的垂直上方2.2m 处拍摄全范围俯视照实现。选用 RTK 测定试验区和样方的具体位置,收集了所有研究样方框的 GPS信息,选定地面控制点对图像进行几何校正。
2.2.2空中数据采集
采用UAV 悬停方式采集试验区内地物高光谱遥感影像,结合2021年草原气候特点和牧草生长期特性,在牧草的生长茂盛期———2021年7月27日— 8月8日时采集数据。为保证采集质量,选择晴朗、无云、光照条件较好,无卷云、浓积云等,风力较小时进行测量,采集时间为10∶00—14∶00,且要求每10—20min使用标准白板进行1次校正,以便消除光照强度变化对UAV高光谱图像产生的影响。UAV搭载高光谱仪垂直于地面的方向30m高度测量研究地块植被的冠层、群落的高光谱数据。每个悬停点采集2幅高光谱遥感影像,单幅图像采集时间耗时7s,包含悬停点间飞行时间,1个架次约可采集86幅遥感影像,即43个悬停点。
2.2.3 数据预处理
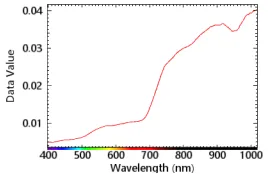
首先,通过人工检查去除过曝、欠曝、弯曲、抖动的遥感影像,选出成像质量最好的遥感影像。其次使用光谱专业软件进行反射率校正,并识别真正的反射率值和感兴趣的特征。最后,使用方法进行数据降维,计算式如下:

(1)式中,X为张量,r为高光谱图像中的行数,c为高光谱图像中的列数,b为高光谱图像中的维数。式(1)计算的高光谱图像F-norm2在 0—67波段(波长为397—548.2nm)的F-norm2的斜率较小,即表示该波段范围内包含的信息量较少;而在 214—256波段(波 长 为 909.7—1019.4nm)的F-norm2的斜率较大,即表示该波段范围内存在明显的噪声干扰,因此经行值降维后保留的68—213波段(波长为550.5—906.8nm),单个图像所占空间大小也随之大幅减少 ,有效提高了数据后处理的效率。
2.3 验证值的确定
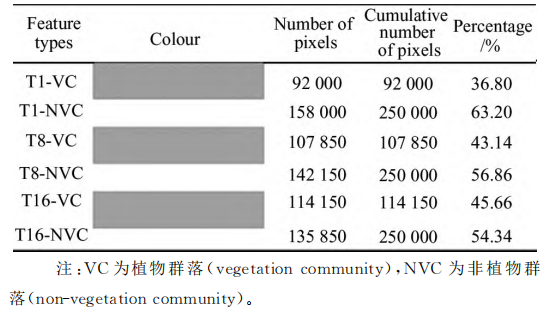
验证值的确定一方面是依据实地设立1m×1m 的样方框通过照相 法确定FVC,但是该方法存在一定的主观判断性而且只代表了局部的FVC。研究表明,基于照相法和全图人工目视解译相结合的方法对FVC的提取精度较高。为了双重保险,后续又结合人工目视解译方法对整张UAV高光谱图像中植物群落和非植物群落(枯草和裸土)进行覆盖度提取,其结果作为地表 FVC 的 验 证 值,对各植被指数提取的草地 FVC 的精度进行验证。本文从1080 组数据中选取20组有代表性的数据作为示例进行研究。20 组数据分别命名为T1、T2、T3、…、T19、 T20。由于图像较多,将其中的T1、T8、T16组高光谱数据设为展示图像,T1、T8、T16组数据覆盖度的验证值详见表1。
表1植物群落和非植物群落验证值
研究方法
3.1 回归模型法
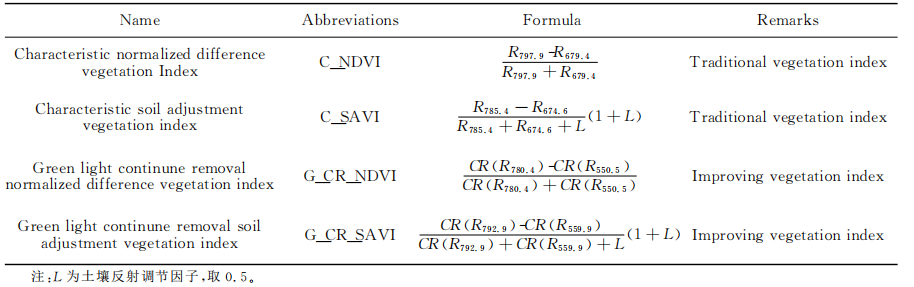
回归模型法是通过对遥感数据的某一波段、波段组合或利用遥感数据计算出的植被指数与FVC进行回归分析,建立经验估算模型。通过回归模型法构建荒漠草原FVC估算模型,选择了2种传统的适合于低密度覆盖绿色植被区域的植被指数,分别为归一化植 被指 数(NDVI)和土壤调整植被指数 (SAVI),在分析植被和土壤光谱曲线差异的基础 上,通过简单波段自相关选择法及编程筛选最敏感的特征波段及组合,确定了植被指数相关系数较高的波段组合为525—600nm、620—780nm 和 780—900nm,相关系数均达0.8以上。对基于传统植被指数的像元二分模型进行了FVC估算,并选取 20组数据进行精度验证。选择SAVI和 NDVI进行 连续统去除及光谱增强,并确定特征波段和波段最佳组合,对高光谱图像进行连续统去除后,峰值点对应的反射率为1,而其他点的反射率均小于1,植物群落在可见光范围中的500nm 和680nm 左右的吸收谷特征被放大,绿光550nm 附近反射峰更加明显, 红边斜率增加明显,这些变化有利于对光谱吸收特征波段及参数的提取,因此提出了绿光连续值土壤调整植被指数(G_CR_SAVI)和绿光连续值归一化 植被指数(G_CR_NDVI),原始及改进的植被指数详见表2。
表2原始及改进的植被指数
3.2 ResNet模型
该模型将残差学习的思想引入到网络结构中,通过跨层链接将残差块的输入与输出进行叠加求和,此项操作提升了反向传播的效率,有效解决了深层网络中出现的梯度爆炸及消失问题,提高了神经网络训练的速度,实现了利用深层网络 结构提取更细的特征。利用 Pytorch模块搭建 ResNet18CNN,该模型 共有20层,包括17个 卷 积 层、2个池化层和1个全连接层,模型结构图详见图2。
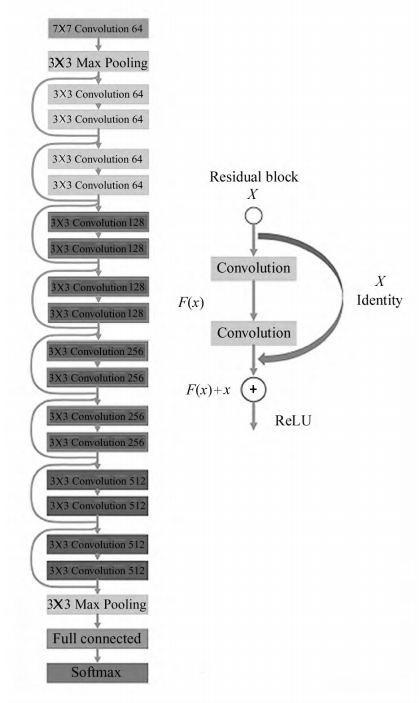
图2 ResNet深度学习模型结构图
每残差块中进行2次卷积层运算,并与卷积前的参数进行叠加,随后利用激活函数ReLU 激活进入下一个残差块。卷积层的卷积核数最少为64个,最多为512个。
3.3改进3D-ResNet18模型
3D卷积核为 一 个 立 方 体,由3D卷积核组成的CNN 称为3D 卷积神经网络,通过3D卷积核 可以同时提取高光谱图像lines、samples和bands方 向上的特征。公式如下:

(2) 式中,f为激活函数,l、w、h 分别代表卷积核立方体 的长、宽、高,m、n 分别代表上一层和本层的卷积核数,ulwhkn为图像上(l,w,h)位 置上的值与上一层第m个卷积核的计算值,uδερkmn为 图 像(δ,ε,ρ)位置上的值与卷积核的第n层、第k个卷积核的计算值。利用F-norm2降低噪声干扰和高光谱数据的维数。在典型的深度学习模型 ResNet18的基础上,将其2D卷积核3D卷积核,即3D-ResNet18。改进后的3D-ResNet18模 型 与 ResNet18模型具有相同的深度,共有20层,包括17个卷积层、2个池化层和1个全连接层,17个卷积层被分成1个卷积层和4个残差块。将卷积层中的2D卷积核改进为3D卷积核,在图3中用Conv3×3×3-N表 示,N为卷积核数量,分别为64、64、128、256、512。每残差块中进行两次卷积层运算,并与卷积前的参数进行叠加,随后利用激 活 函 数 ReLU 激活进入下一个 残差块。为了提高处理速度,程序用高光谱影像裁剪为500lines×500samples×146bands,总 共250000个 像素。为了识别特征,随机选择60%的标记样本 作 为训练数据,其余的40%作为测试数据。
结果分析
4.1 评价指标
在进行覆盖度估算模型的精度分析时,选 用以下3个指标进行验证 分 析:估算值和实测值间的决定系数(R2)、估算值和实测值间的均方根误差(RMSE )和估算 精 度(EA )。当 R2值越 接近1、RMSE的值越小且估算精度越 时,说明估测方程所得到的估算值与实测值的拟合效果就越好,模型的精度就越高。R2、RMSE、EA 的计算式如下:
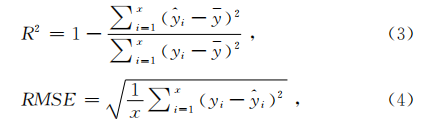
式中,

为第i个样本的估算,yi 为第i个样本的实 测值,:

为实测值的平均值,x 为样本数量。

式中,Rm为均方根误差,Me 为实测值的均值,EA 为估算精度。
4.2回归模型法
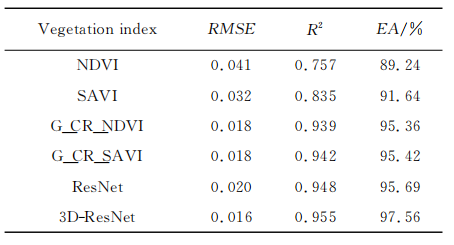
改进植被指数中提取的 FVC 与验证值最为接近,其RMSE和EA 分别为0.018和 95.42%;其次为 G_CR_NDVI,RMSE 和EA 分别为 0.018和95.36%,SAVI提取的FVC与验证值较为接近 ,其RMSE和EA分别为0.032和91.64%,详见表3。
表3 植被覆盖度与各方法对应的模型精度
从估算值与验证值之间的散点图来看,G_CR_SAVI和 G_CR_NDVI估算值紧密分 布在1∶1线的两侧,其中 G_CR_SAVI估算值与验证值之间的R2高达0.942,G_CR_NDVI估算值与验证值之间的R2高达0.939。基于改进植被指数与传统植被指数的荒漠草原UAV高光谱图像FVC估算精度大小依次为 G_CR_SAVI>G_CR_NDVI> SAVI>NDVI。分析表明:通过光谱增强及最佳波段选择的改进 G_CR_SAVI和 G_CR_NDVI植被指数优于传统的 SAVI、NDVI植被指数,FVC 估 算 精 度较传统的植被指数 高出约4%,G_CR_SAVI在4个植被指数中的提取效果最好,最适合于荒漠草原UAV 高光谱影像 FVC的提取。最佳波段组合的植被指数计算结果详见图4。
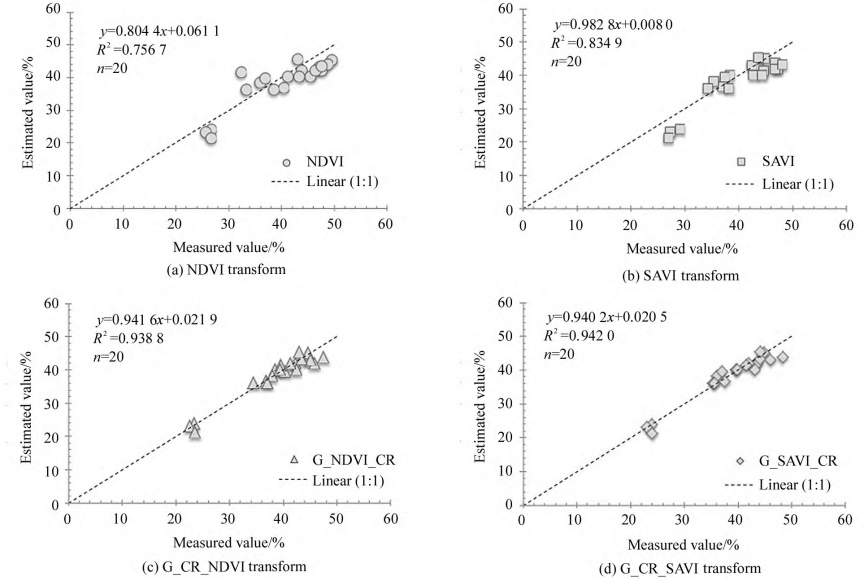
图4 植被指数变换分布图
4.3 深度学习法
为实现基于UAV 高光谱遥感的荒漠草原覆盖 度人工智能化估算,制作了荒漠草原 UAV 高光谱覆 盖度数据集,通过 ResNet18经典深度学习网络模型对覆盖度数据集进行分类,发现其对覆盖度数据集取得了较理想的总体分类精度,并对覆盖度数据集中的植被和裸土取得较高的单体分类精度。为进一步实现对荒漠草原UAV 高光谱数据中的覆盖度高精度估算,基 于 ResNet模 型 建立3D卷积模型3D- ResNet,并进行模型结构与超参数优化,通过对卷积核数、卷积核尺寸、Batchsize等参数优化与对比,发现对覆盖度数据集分类性能最佳的模型为3D-Res- Net,总体估算精度达97.56%,覆盖度估算的RMSE 为0.016,详见表3。
3D卷积网络模型对覆盖度数据集具有更好的提 取性能。相比于2D卷积仅能同时提取覆盖度数据集中的2D光谱 信 息,3D 卷积可以同时提取光谱- 空间联合信息,充分利用了高光谱覆盖度数据集的数据特性,对细小特征的提取展现出良好潜力,得益于3D卷积核可以同时提取高光谱数据中3个维度的光谱信息,相比2D卷积核同时提取 X、Y2个维度的光谱信息,3D卷积核对地物的空间特征提取能力更强。通过对模型结构与超参数优化逐步提高了模型 性能,同时发现具有更卷积结构的3D-ResNet模 型展现出更好的性能。部分数据可视化结果如图5 所示。
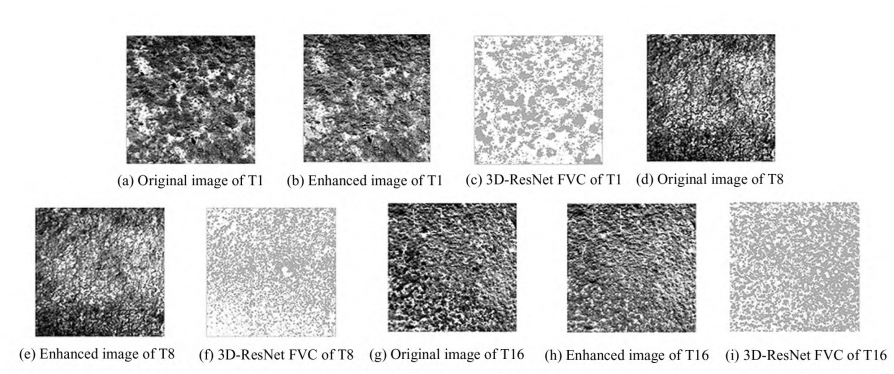
图5覆盖度估算模型可视化结果
3D-ResNet模型实现了对覆盖度数据集地物的高精度、高效率、智能化识别,为基于UAV高光谱 遥感的荒漠化草原覆盖度的快速、高效、精准统计奠定基础。
5、总结
针对荒漠草原覆盖度提取效率和精度较低的现状,基于人工智能技术和3D 卷积深度学习方法,深挖了高光谱数据中的空间特征,建立了高效准确的高光谱遥感图像的覆盖度估算模型,验证了3D-Res- Net模型在计算FVC为指标的草地退化评价的可行性和精确性。就估算精度而言,深度学习法优于回归模型法,尤其是经过3D卷积核改进的深度学习模型最佳,总体估算精度达97.56%,可以实现智能化、 高精度、准确地荒漠草原 FVC提取。
推荐:
便携式地物光谱仪iSpecField-NIR/WNIR
专门用于野外遥感测量、土壤环境、矿物地质勘探等领域的最新明星产品,由于其操作灵活、便携方便、光谱测试速度快、光谱数据准确是一款真正意义上便携式地物光谱仪。

无人机机载高光谱成像系统iSpecHyper-VM100
一款基于小型多旋翼无人机机载高光谱成像系统,该系统由高光谱成像相机、稳定云台、机载控制与数据采集模块、机载供电模块等部分组成。无人机机载高光谱成像系统通过独特的内置式或外部扫描和稳定控制,有效地解决了在微型无人机搭载推扫式高光谱照相机时,由于振动引起的图像质量较差的问题,并具备较高的光谱分辨率和良好的成像性能。

便携式高光谱成像系统iSpecHyper-VS1000
专门用于公安刑侦、物证鉴定、医学医疗、精准农业、矿物地质勘探等领域的最新产品,主要优势具有体积小、帧率高、高光谱分辨率高、高像质等性价比特点采用了透射光栅内推扫原理高光谱成像,系统集成高性能数据采集与分析处理系统,高速USB3.0接口传输,全靶面高成像质量光学设计,物镜接口为标准C-Mount,可根据用户需求更换物镜。

审核编辑 黄宇
-
遥感
+关注
关注
0文章
248浏览量
16926 -
无人机
+关注
关注
230文章
10572浏览量
183275 -
高光谱
+关注
关注
0文章
360浏览量
10052 -
深度学习
+关注
关注
73文章
5524浏览量
121784 -
卷积网络
+关注
关注
0文章
42浏览量
2242
发布评论请先 登录
相关推荐
无人机低空高光谱遥感影像柑橘黄龙病植株监测模型探究
无人机遥感技术
无人机遥感系统的研究进展与应用前景
基于无人机高光谱遥感的火龙果种植株数提取技术
基于无人机高光谱遥感的森林可燃物分类方法研究-莱森光学
无人机遥感监测作物病虫害胁迫方法
比较基于无人机高光谱影像和传统方法的土壤类型分类精度

基于无人机高光谱遥感的典型草原打草对植被表型差异分析






 工商网监
工商网监
评论